1.本发明涉及汽车座椅技术领域,尤其涉及一种电动两向调节中央扶手结构。
背景技术:
2.车辆后排座椅中央扶手作为车辆座椅系统的重要组成部分,其功能的丰富度以及使用体验可以极大地影响整车的豪华舒适程度以及整车氛围感。车辆后排座椅中央扶手系统若采用电动两向设计,即实现扶手电动翻转和扶手电动升降,一方面可以实现扶手控制的电动化,另一方面可简化后排乘客的操作,提高乘车舒适性与便利性,同时还可以满足不同身材乘客对扶手的使用需求,并提高整车的豪华度。
3.目前市场上还没有采用电动一体化控制扶手翻转和扶手升降的中央扶手系统。
4.为此,本技术人经过有益的探索和研究,找到了解决上述问题的方法,下面将要介绍的技术方案便是在这种背景下产生的。
技术实现要素:
5.本发明所要解决的技术问题在于:针对现有技术的不足而提供一种实现扶手控制的电动化、简化后排乘客的操作、提高乘车舒适性与便利性、提高整车的豪华度的电动两向中央扶手结构。
6.本发明所要解决的技术问题可以采用如下技术方案来实现:
7.一种电动两向调节中央扶手结构,其特征在于,包括:
8.安装在后排座椅骨架总成上的固定支架总成;
9.安装在所述固定支架总成上的丝杆驱动电机总成;
10.滑动配置在所述固定支架总成上的用于在所述丝杆驱动电机总成驱动下带动中央扶手进行升降的扶手升降运动总成;
11.滑动配置在所述固定支架总成上的用于在所述丝杆驱动电机总成驱动下带动中央扶手进行翻转的扶手翻转运动总成;以及
12.套装在所述扶手翻转运动总成的扶手骨架上的扶手功能总成;
13.工作时,所述丝杆驱动电机总成通过扶手翻转运动总成驱动所述扶手功能总成进行翻转展开,再通过所述扶手升降运动总成驱动处于展开状态下的扶手功能总成进行升降。
14.在本发明的一个优选实施例中,还包括扶手控制模块,所述扶手控制模块设置在所述后排座椅骨架总成内且分别与所述丝杆驱动电机总成和汽车电子控制系统连接。
15.在本发明的一个优选实施例中,所述固定底板总成包括:
16.固定安装在所述后排座椅骨架总成上的固定底板,所述固定底板的中间位置开设有沿长度方向延伸的长条状导向槽;以及
17.设置在所述固定底板上且位于所述固定底板左、右侧的左、右限位轨道,所述左、右限位轨道内开设有沿固定底板长度方向延伸的左、右导向槽。
18.在本发明的一个优选实施例中,所述丝杆驱动电机总成包括:
19.固定在所述固定底板的上部的丝杆电机;
20.位于所述固定底板的长条状导向槽的上方且沿所述固定底板长度方向延伸的丝杆,所述丝杆的一端与所述丝杆电机的输出端连接,其另一端通过丝杆固定架固定安装在所述固定底板上;以及
21.配置在所述丝杆上的用于触发所述扶手翻转运动总成和扶手翻转运动总成进行动作的丝杆滑块座。
22.在本发明的一个优选实施例中,在所述固定底板的上部形成有背离所述后排座椅骨架总成方向翻折的丝杆电机安装翻折片,所述丝杆电机安装在所述丝杆电机安装翻折片上,在所述丝杆电机安装翻折片与丝杆电机之间安装有减震垫片。
23.在本发明的一个优选实施例中,所述扶手升降运动总成包括:
24.升降支架板,所述升降支架板呈倒t字型结构,其竖直部分上形成有沿长度方向延伸的左、右扶手翻转导向槽;
25.设置在所述升降支架板的背面上的升降导向块,所述升降导向块滑动嵌设在所述固定底板的长条状导向槽内;以及
26.固定设置在所述升降支架板的左、右侧缘处且背离所述固定底板方向延伸的左、右支撑肋板,所述左、右支撑肋板靠近所述升降支架板的位置处开设有左、右弧形扶手翻转限位槽,所述左、右支撑肋板远离所述升降支架板的一侧处开设有左、右扶手翻转孔。
27.在本发明的一个优选实施例中,所述扶手翻转运动总成包括:
28.扶手骨架,所述扶手骨架的一侧向外延伸形成有对称间隔布置的左、右弧形翻转臂,所述扶手骨架靠近所述左、右弧形翻转臂的位置处开设有轴孔,所述左、右弧形翻转臂远离所述扶手骨架的一端的外侧面分别形成有左、右翻转限位凸起,所述左、右翻转限位凸起分别嵌入至所述升降支架板的左、右弧形扶手翻转限位槽内;
29.固定穿设在所述扶手骨架的轴孔内且不可转动的固定轴,所述固定轴的左、右端分别露出所述扶手骨架的轴孔的左、右端并穿过所述左、右支撑肋板的左、右扶手翻转孔;
30.滑动穿设在所述丝杆滑块座内的滑动转轴,所述滑动转轴的左、右端分别露出所述丝杆滑块座的表面并依次穿过所述升降支架板的左、右扶手翻转导向槽和所述固定底板的左、右导向槽;
31.左、右上铰链支架,所述左、右上铰链支架的一端与所述滑动转轴的左、右端铰接;以及
32.左、右下铰链支架,所述左、右下铰链支架的一端与所述左、右上铰链支架的另一端铰接,其另一端分别与所述固定轴的左、右端固定连接。
33.在本发明的一个优选实施例中,在所述扶手骨架的表面上开设有与所述轴孔连通的转动限位孔,所述转动限位孔内通过固定螺丝嵌装有用于限制所述固定轴转动的限位镶块。
34.在本发明的一个优选实施例中,在所述丝杆滑动座的表面上形成有转轴座,所述滑动转轴穿过所述丝杆滑动座的转轴座,在所述滑动转轴位于所述左、右上铰链支架与转轴座之间分别套设有左、右阻尼套圈。
35.在本发明的一个优选实施例中,所述左、右上铰链支架与左、右下铰链之间分别通
过台阶卡柱进行铰接。
36.由于采用了如上技术方案,本发明的有益效果在于:本发明通过连杆机构以及丝杆电机配合,实现后排中央扶手的电动开合,扶手完全展开状态下,电机继续运行可以带动扶手整体高度提升,实现扶手高度的双向调节。本发明的扶手电动调节机构隐藏于后排座椅骨架总成中,隐藏式设计和旋转运动的过程能为整车内饰带来科技感和个性化。利用四连杆和丝杆电机系统控制的两个维度的联动运动,即可实现扶手的开合升降,节约成本、空间和重量。本发明可适配兼容不同的扶手设计,这样既节约了成本,又存在进步升级的空间。
附图说明
37.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1是本发明应用于后排座椅上的起始展开阶段的示意图。
39.图2是本发明应用于后排座椅上的完全展开阶段的示意图。
40.图3是本发明应用于后排座椅上的完全抬升阶段的示意图。
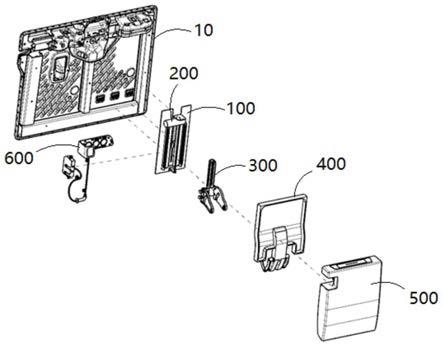
41.图4是本发明的分解结构示意图。
42.图5是本发明的固定支架总成与丝杆驱动电机总成组合的三维结构示意图。
43.图6是本发明的固定支架总成与丝杆驱动电机总成组合的分解结构示意图
44.图7是本发明的扶手升降运动总成的三维结构示意图。
45.图8是本发明的扶手升降运动总成的正视图。
46.图9是本发明的扶手升降运动总成的分解结构示意图。
47.图10是本发明的扶手翻转运动总成的一个视角的三维结构示意图。
48.图11是本发明的扶手翻转运动总成的另一个视角的三维结构示意图。
49.图12是本发明的扶手翻转运动总成的分解结构示意图。
50.图13是本发明的运动轨迹示意图。
51.图14是本发明处于初始位置时的一个视角的三维结构示意图(省略扶手功能总成和扶手骨架)。
52.图15是本发明处于初始位置阶段的另一个视角的三维结构示意图(省略扶手功能总成和扶手骨架)。
53.图16是本发明处于扶手展开阶段的三维结构示意图(省略扶手功能总成和扶手骨架)。
54.图17是本发明处于扶手展开阶段的局部放大示意图(省略扶手功能总成和扶手骨架)。
55.图18是本发明处于扶手展开阶段的三维结构示意图(省略扶手功能总成和扶手骨架)。
56.图19是本发明处于扶手展开阶段的局部放大示意图(省略扶手功能总成和扶手骨架)。
57.图20是本发明处于扶手展开阶段的三维结构示意图(省略扶手功能总成和扶手骨架)。
58.图21是本发明处于扶手展开阶段的局部放大示意图(省略扶手功能总成和扶手骨架)。
59.图22是本发明处于扶手展开阶段的局部放大示意图(省略扶手功能总成)。
60.图23是图22的a
‑
a剖视图。
61.图24是本发明处于扶手完全展开位置的一个视角的三维结构示意图(省略扶手功能总成)。
62.图25是本发明处于扶手完全展开位置的另一个视角的三维结构示意图(省略扶手功能总成)。
63.图26是本发明处于扶手抬升阶段的三维结构示意图(省略扶手功能总成)。
64.图27是图26的局部后视图。
65.图28是本发明处于扶手抬升阶段的局部放大示意图。
66.图29是本发明处于完全抬升位置的局部放大示意图。
67.图30是本发明处于完全抬升位置的后方三维示意图。
68.图31是本发明处于扶手下降阶段的局部放大示意图。
69.图32是本发明处于扶手完全下降位置的三维结构示意图。
70.图33是本发明处于扶手翻转折叠阶段的三维结构示意图。
71.图34是本发明处于扶手翻转折叠阶段的三维结构示意图(省略扶手功能总成和扶手骨架)。
72.图35是本发明处于扶手完全折叠位置的三维结构示意图(省略扶手功能总成和扶手骨架)。
具体实施方式
73.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
74.本发明通过丝杆电机以及连杆机构配合,实现后排中央扶手的电动开合,如图1和图2所示,扶手完全展开状态下,电机继续运行可以带动扶手整体高度提升,如图3所示,实现扶手高度的双向调节。
75.参见图4,图中给出的是一种电动两向调节中央扶手结构,包括固定支架总成100、丝杆驱动电机总成200、扶手升降运动总成300、扶手翻转运动总成400、扶手功能总成500以及扶手控制模块600。
76.固定支架总成100安装在后排座椅骨架总成10上。具体地,参见图5和图6,固定支架总成100包括固定底板110以及左、右限位轨道120a、120b。
77.固定底板110通过螺栓等紧固件例固定安装在后排座椅骨架总成10上,固定底板110的中间位置开设有沿长度方向延伸的长条状导向槽111。左、右限位轨道120a、120b设置在固定底板110上且位于固定底板110左、右侧,左、右限位轨道120a、120b内开设有沿固定底板110长度方向延伸的左、右导向槽121a、121b。
78.丝杆驱动电机总成200安装在固定支架总成100上。具体地,参见图5和图6并结合
图10至图12,丝杆驱动电机总成200包括丝杆电机210、丝杆220以及丝杆滑块座230。
79.丝杆电机210固定在固定底板110的上部且与扶手控制模块600连接,在固定底板110的上部形成有背离后排座椅骨架总成10方向翻折的丝杆电机安装翻折片112,丝杆电机210通过丝杆电机安装螺钉211安装在丝杆电机安装翻折片112上。在丝杆电机安装翻折片112与丝杆电机210之间安装有减震垫片212,以提高减震效果。丝杆220位于固定底板110的长条状导向槽111的上方且沿固定底板110长度方向延伸,丝杆220的一端与丝杆电机210的输出端连接,其另一端通过丝杆固定架221固定安装在固定底板110上。丝杆滑块座230配置在丝杆220上,其用于触发扶手升降运动总成300和扶手翻转运动总成400进行动作。
80.扶手升降运动总成300滑动配置在固定支架总成100上,其用于在丝杆驱动电机总成200驱动下带动中央扶手进行升降。具体地,参见图7至图9,扶手升降运动总成300包括升降支架板310、升降导向块320以及左、右支撑肋板330a、330b。
81.升降支架板310呈倒t字型结构,其竖直部分上形成有沿长度方向延伸的左、右扶手翻转导向槽311a、311b。升降导向块320通过螺钉321设置在升降支架板310的背面上,升降导向块320滑动嵌设在固定底板110的长条状导向槽111。左、右支撑肋板330a、330b固定设置在升降支架板310的左、右侧缘处且背离固定底板110方向延伸,左、右支撑肋板330a、330b靠近升降支架板310的位置处开设有左、右弧形扶手翻转限位槽331a、331b,左、右支撑肋板330a、330b远离升降支架板310的一侧处开设有左、右扶手翻转孔332a、332b。
82.扶手翻转运动总成400滑动配置在固定支架总成100上,其用于在丝杆驱动电机总成200驱动下带动中央扶手进行翻转。具体地,参见图10至图12,扶手翻转运动总成400包括扶手骨架410、固定轴420、滑动转轴430、左、右上铰链支架440a、440b以及左、右下铰链支架450a、450b。
83.扶手骨架410的一侧向外延伸形成有对称间隔布置的左、右弧形翻转臂411a、411b,扶手骨架410靠近左、右弧形翻转臂411a、411b的位置处开设有轴孔412,左、右弧形翻转臂411a、411b远离扶手骨架410的一端的外侧面分别形成有左、右翻转限位凸起4111a、4111b,左、右翻转限位凸起4111a、4111b分别嵌入至升降支架板310的左、右弧形扶手翻转限位槽331a、331b内。固定轴420固定穿设在扶手骨架410的轴孔内且不可转动,固定轴420的左、右端分别露出扶手骨架410的轴孔412的左、右端并穿过左、右支撑肋板330a、330b的左、右扶手翻转孔332a、332b。为了限制固定轴420不转动,在扶手骨架410的表面上开设有与轴孔412连通的转动限位孔413,转动限位孔413内通过固定螺丝414嵌装有用于限制固定轴420转动的限位镶块415。滑动转轴430滑动穿设在丝杆滑块座230内,滑动转轴430的左、右端分别露出丝杆滑块座230的表面并依次穿过升降支架板310的左、右扶手翻转导向槽311a、311b和固定底板110的左、右导向槽121a、121b。在丝杆滑块座230的表面上形成有转轴座231,滑动转轴430穿过丝杆滑动座230的转轴座231,在滑动转轴430位于左、右上铰链支架440a、440b与转轴座231之间分别套设有左、右阻尼套圈431a、431b。左、右上铰链支架440a、440b的一端与滑动转轴430的左、右端铰接。左、右下铰链支架450a、450b的一端通过台阶卡柱451a、451b与左、右上铰链支架440a、440b的另一端铰接,其另一端分别与固定轴420的左、右端固定连接。
84.扶手功能总成500套装在扶手翻转运动总成400的扶手骨架410上。
85.扶手控制模块600隐藏设置在后排座椅骨架总成10内且分别与丝杆驱动电机总成
200的丝杆电机210和汽车电子控制系统(图中未示出)连接。工作时,扶手控制模块600控制丝杆驱动电机总成200进行动作,丝杆驱动电机总成200通过扶手翻转运动总成400驱动扶手功能总成500进行翻转展开,再通过扶手升降运动总成300驱动处于展开状态下的扶手功能总成500进行升降。
86.本发明的电动两向中央扶手结构在各阶段区间驱动力转换路径示意如下:
87.参见图13,本发明的电动两向中央扶手结构通过丝杆电机210驱动丝杆滑块座230带动扶手升降运动总成300和扶手翻转运动总成400完成扶手的电动翻折与升降功能。
88.参见图14和图15,在初始位置,扶手位于最低且完全收起位置。扶手升降运动总成300的支脚g和固定支架总成100因重力作用接触于挡点o,滑动转轴430与扶手升降运动总成300接触于挡点p。
89.参见图16至图18,扶手处于展开阶段。丝杆电机210通过丝杆220转动带动丝杆滑块座230向上运动。丝杆滑块座230可带动滑动转轴430沿升降支架板310的左、右扶手翻转导向槽311a、311b和固定底板110的左、右导向槽121a、121b运动。与滑动转轴430铰接的左、右上铰链支架440a、440b将随着滑动转轴430同步运动。
90.参见图19和图20,扶手处于展开阶段。左、右上铰链支架440a、440b通过滑动转轴430与丝杆滑块座230连接,并可以绕滑动转轴430旋转。左、右上铰链支架440a、440b与左、右下铰链支架450a、450b通过台阶卡柱451a、451b连接,连接点为一个活动端点a。左、右下铰链支架450a、450b的另一端与固定轴420连接,连接点为一个固定端点b。以此,左、右上铰链支架440a、440b、左、右下铰链支架450a、450b、滑动转轴430、活动端点a和固定端点b组成了一套曲柄滑块机构。滑动转轴430的向上运动将带动左、右上铰链支架440a、440b同步运动,左、右上铰链支架440a、440b通过活动端点a带动左、右下铰链支架450a、450b绕固定端点b旋转,活动端点a也会随着左、右下铰链支架450a、450b旋转。
91.参见图21至图23,扶手处于展开阶段。左、右下铰链支架450a、450b与固定轴420为固定连接。固定轴420通过限位镶块415和固定螺丝414与扶手骨架410也形成固定连接。因此左、右下铰链支架450a、450b与扶手骨架410相对固定。固定轴420绕固定端点b旋转将通过固定端点b与限位镶块415带动扶手骨架410也绕固定端点b旋转,完成扶手整体的翻折打开动作。
92.参见图24和图25,扶手处于完全展开位置。当丝杆电机210带动丝杆滑块座230向上运动,到扶手骨架410与扶手升降运动总成300接触于挡点c时,翻折运动到达极限位置,扶手完全展开。在该位置,挡点c为刚性接触,扶手骨架410所受外部负载经过挡点c由扶手升降运动总成300承担,电机无负载。当丝杆电机210带动丝杆滑块座230以及其他相关零件继续向上运动即进入扶手抬升行程。
93.参见图26和图27,在扶手抬升行程中,扶手升降运动总成300与固定支架总成100之间通过升降导向块320以及支脚g形成活动连接。升降导向块320可以引导扶手升降运动总成300沿着固定支架总成100上的长条状导向槽111相对固定支架总成100运动。通过该连接,可以约束扶手升降运动总成300与固定支架总成100之间的y向运动。支脚g可以沿固定支架总成100上的左、右导向槽121a、121b运动。扶手升降运动总成300所受负载主要由支脚g承担。
94.参见图28,扶手处于抬升行程中,当丝杆电机210带动丝杆滑块座230经过行程节
点继续向上运动,滑动转轴430与扶手升降运动总成300在挡点e接触。滑动转轴430通过该位置的接触带动扶手升降运动总成300沿固定支架总成100向上相对移动。该行程中,扶手翻转运动总成400内部保持相对静止,完成扶手的整体抬升。
95.参见图29和图30,扶手处于完全抬升位置。当丝杆滑块座230带动滑动转轴430运动到滑动转轴430与固定支架总成100接触于挡点d时,电机堵转,系统达到运动极限位置,扶手整体达到最高抬升位置。
96.参见图31,扶手处于下降行程中,丝杆电机210推动丝杆滑块座230与滑动转轴430向下运动,丝杆滑块座230与固定支架总成100在挡点d的接触解除。扶手升降运动总成300受重力作用与丝杆滑块座230保持在挡点e的接触,并随着丝杆滑块座230一同向下运动。该行程中,扶手翻转运动总成400内部保持相对静止,扶手整体伴随扶手升降运动总成300向下运动。
97.参见图32,扶手处于完全下降位置时,在丝杆电机210推动下,丝杆滑块座230、滑动转轴430与扶手升降运动总成300一同向下运动。当扶手升降运动总成300与固定支架总成100接触于挡点o时。扶手升降运动到达下极限位置。当丝杆滑块座230进一步运动,由于挡点o的阻挡,滑动转轴430与扶手升降运动总成300在挡点e的接触解除,进入扶手折叠行程。
98.参见图33和图34,扶手进入折叠行程中,当丝杆电机210带动丝杆滑块座230经过行程节点继续向下运动,由于挡点o的阻挡,滑动转轴430与扶手升降运动总成300于挡点e的接触解除。扶手骨架410与扶手升降运动总成300于挡点c的接触解除,扶手升降运动总成300与固定支架总成100保持挡点o的接触。滑动转轴430带动左、右上铰链支架440a、440b向下运动,并带动左、右下铰链支架450a、450b绕固定轴420旋转。与左、右下铰链支架450a、450b成固定连接的扶手骨架410也将绕固定轴420旋转,完成扶手的折叠动作。
99.参见图35,当丝杆滑块座230带动滑动转轴430运动到滑动转轴430与扶手升降运动总成300接触于挡点p时,电机堵转,系统达到运动极限位置,扶手整体达到完全折叠位置。
100.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。