1.本发明涉及用于对晃荡进行确定的方法和设备领域,特别是用于对船舶中的液体装载物的晃荡进行确定的方法和设备。
背景技术:
2.在液体的储存和/或运输过程中,容纳在容器中的液体会经历不同的运动。具体地,例如在诸如海况或风等天气条件的影响下,包括容器的船舶在海上的运动会引起容器中液体的振荡。液体的振荡,通常被称为“晃荡”,会在容器壁上产生应力,该应力会损坏容器的完整性。现在,由于所运输液体的易燃或易爆性质以及在浮动单元的钢质船体上出现冷点的风险,因此在lng容器的背景下,容器的完整性尤为重要。
3.由us8643509所描述的一种方法是已知的,该方法用于对由液体的晃荡产生的对容器的损坏风险进行确定并且当损坏风险超过预定阈值时向船舶的驾驶员发出警报。该方法对根据船舶所经历的海况而由晃荡产生的损坏风险进行确定,所述海况由天气和海洋条件以及船舶的数字模型来确定。
技术实现要素:
4.本发明人已经发现,考虑到大量可能的海况,尤其是在某些状况下存在多模态海况,在数字模型中实现对海况的精确核算是复杂的。
5.本发明所基于的一个思想是:通过在计算时间和计算资源方面相对经济的方法来对船舶中包含的液体的晃荡进行确定。为此,本发明所基于的另一思想是:提供一种用于通过确定海况来对晃荡进行确定的方法,该方法不太复杂以在不降低对晃荡进行确定的可靠性的情况下减少计算时间。
6.根据一个实施方式,本发明提供了一种用于对船舶的液体装载物的晃荡进行确定的方法,所述方法包括:
7.根据所述船舶经历的涌浪状态和海风状态而对单模态激励进行确定的步骤,
8.根据单模态激励对与所述装载物的晃荡相关的数据进行确定的步骤。
9.该方法是有利的,因为该方法对与包括涌浪状态和海风状态的多模态激励等效的单模态激励进行确定。因此,晃荡是针对等效的单模态激励而不是多模态激励而确定的,多模态激励通过计算或通过实验来建模会复杂得多。因此,与现有技术相比,该方法在计算资源方面不那么密集并且需要更少的计算时间。
10.根据实施方式,这种方法可以包括以下特征中的一个或更多个。
11.晃荡的确定步骤可以以不同的方式执行。根据一个实施方式,通过查阅先前建立的数据库来根据单模态激励对与所述晃荡相关的数据进行确定,所述数据库包括根据单模态激励来表示晃荡的数据。该数据库可以包括根据单模态激励、通过实验室中的实验或从海上的船上测量活动获得的晃荡水平。根据另一实施方式,与晃荡相关的数据由先前建立的数字建模进行确定,所述数字建模根据单模态激励来表示晃荡。
12.涌浪状态和/或海风状态限定船舶的环境数据。根据一个实施方式,涌浪状态包括涌浪的有效高度和/或涌浪的高峰期和/或涌浪相对于船舶的纵向轴线的方向。根据一个实施方式,海风状态包括有效海风高度和/或海风高峰期和/或相对于纵向轴线的海风方向。
13.根据一个实施方式,涌浪状态和/或海风状态由设置在船舶中的传感器进行实时地确定,并且所述传感器被配置为测量涌浪的有效高度和/或涌浪的高峰期和/或涌浪方向以及有效海风高度和/或海风高峰期和/或海风方向。
14.根据一个实施方式,涌浪状态和/或海风状态是从气象和海洋条件间接确定的。
15.根据一个实施方式,涌浪状态和/或海风状态由天气预报确定。
16.单模态激励可以以不同的方式进行确定。根据一个实施方式,涌浪状态包括涌浪的有效高度并且海风状态包括有效海风高度,并且单模态激励呈现总有效高度,所述总有效高度等于所述涌浪的有效高度和所述有效海风高度的均方根。
17.根据一个实施方式,涌浪状态包括涌浪的高峰期并且海风状态包括海风高峰期,并且单模态激励呈现总高峰期,所述总高峰期等于来自所述涌浪的高峰期和所述海风高峰期中的被选择为产生所述装载物的最剧烈晃荡的时期中的高峰期。在这种情况下,该方法可以包括通过以下方式从涌浪的高峰期和海风高峰期之中选择总高峰期的步骤:
18.对例如通过实验获得的数据进行第一次数据库查询,以确定由涌浪的高峰期产生的第一晃荡,
19.第二次数据库查询,以确定由海风高峰期产生的第二晃荡,以及
20.对第一晃荡和第二晃荡之中的最剧烈晃荡进行确定。
21.根据一个实施方式,涌浪状态包括涌浪方向并且海风状态包括海风方向,并且单模态激励将总方向呈现为与如下方向相等:所述如下方向来自涌浪方向和海风方向中的、与船舶的纵向轴线成直角的方向最接近的方向。
22.根据一个实施方式,该方法包括根据与所述晃荡相关的所述数据以及所述容器的填充水平,对包含全部装载物或部分装载物的所述船舶的容器的损坏概率进行确定的步骤。具体地,所述损坏概率与根据与所述晃荡相关的所述数据以及所述容器的填充水平而遇到所述容器的内表面上的压力大于所述容器的内阻力的概率密度是相关的。
23.具体地,容器的填充水平可以通过布置在所述容器中的填充水平传感器进行确定。
24.根据一个实施方式,该方法包括当与晃荡相关的数据高于预定阈值时为船舶的操作者发射音频信号或视觉信号的步骤。
25.根据一个实施方式,该方法还包括对船舶经历有效多模态激励进行检测的步骤。在这种情况下,当在以下情况下时会检测到有效多模态激励:
26.涌浪的有效高度和有效海风高度不为零,以及
27.涌浪方向与海风方向之间的差值大于15
°
,以及
28.涌浪的有效高度和有效海风高度小于涌浪的有效高度和有效海风高度的均方根的85%。
29.根据该实施方式,该方法包括:在对船舶经历有效多模态激励进行检测之后,根据有效多模态激励的海风状态和涌浪状态,对与晃荡相关的数据进行确定的步骤。该方法还可以包括:响应于对船舶经历有效多模态激励进行检测,根据与涌浪状态和海风状态相对
应的重组单模态激励来对与装载物的晃荡相关的数据进行确定的步骤。在这种情况下,重组单模态激励由气象或海洋服务提供。
30.根据一个实施方式,液体是液化气,例如液化天然气。
31.根据本发明的另一方面,提出了一种用于对船舶的液体装载物的晃荡进行确定的设备,所述设备包括被配置为实现上述方法的处理器。
32.这种用于对晃荡进行确定的设备或方法可以安装在浮动的、沿海的或深水结构中,尤其是甲烷油轮、浮动存储和再气化单元(fsru)、海上浮动生产和存储(fpso)单元、驳船等。此外,这种用于对晃荡进行确定的设备或方法可以针对浮动结构的尺寸而实现,特别是根据与由这种设备或这种方法确定的与装载物的晃荡相关的数据来确定船舶或所述船舶的容器的尺寸。这种用于对晃荡进行确定的设备或方法也可以被实现为对要自动执行或由船舶的驾驶员执行的导航设定点,例如船舶的速度、方向进行确定,以便减低或避免船舶的晃荡水平。
33.根据本发明的另一方面,提出了一种船舶,例如用于运输诸如液化天然气等的冷液体产品的船舶,该船舶包括含有装载物的至少一个容器和上述用于对晃荡进行确定的设备。
附图说明
34.参照附图,从以说明性的方式而非限制性的方式给出的本发明的几个特定实施方式的以下描述中,本发明将被更好地理解,并且本发明的其他目的、细节、特征和优点将变得更加显而易见。
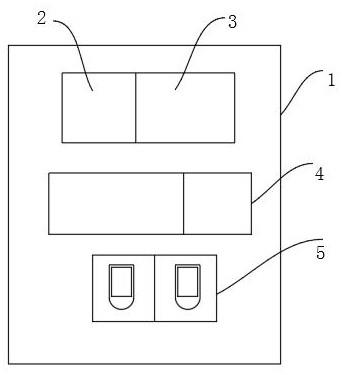
35.[图1]图1是船舶的纵向截面示意图,该船舶包括含有液体装载物的多个容器。
[0036]
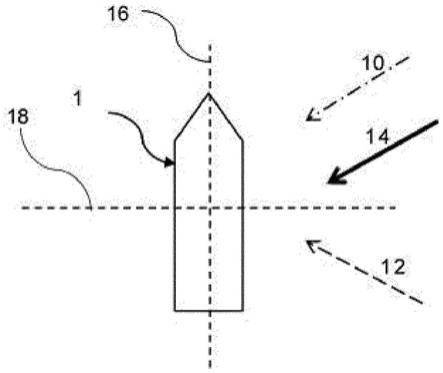
[图2]图2是图1的船舶可能经历的海风状态和涌浪状态的示意图。
[0037]
[图3]图3是用于对图1的船舶的晃荡进行确定的方法的示意图。
[0038]
[图4]图4是用于对图1的船舶的晃荡进行确定的设备的示意图。
具体实施方式
[0039]
在下文中在船舶1的背景下描述附图,该船舶1包括形成支承结构的双壳船体,在该双壳船体中布置有多个密封且隔热的容器。这种支承结构具有例如多面体几何形状,例如棱柱形式的多面体几何形状。
[0040]
这种密封且隔热的容器被提供例如用于运输液化气。液化气在低温下被储存在这种容器中并且在这种容器中被运输,该低温需要隔热的容器壁以将液化气保持在该温度下。因此,保持容器壁完好无损是特别重要的,一方面是用以保护容器的密封性并且避免液化气从容器中泄漏出来,另一方面是用以避免容器的隔绝特性的劣化,从而保持所述气体处于该气体的液化状态。
[0041]
这种密封且隔热的容器还包括锚固在船舶的双壳船体上并且对至少一个密封膜进行支承的隔绝屏障。作为示例,这种容器可以根据例如在fr2691520中所述的mark类型的技术进行制造、根据例如在fr2877638中所述的类型的技术进行制造、或者根据例如在wo14057221中所述的其他技术进行制造。
[0042]
图1示出了包括四个密封且隔热的容器2的船舶1。在这种船舶1上,容器2通过货物
处理系统(未示出)彼此连接,该货物处理系统可以包括许多部件,例如泵、阀和管道,以允许液体从容器2中的一个容器转移到另一容器2。
[0043]
图1中的四个容器2具有填充的初始状态。在此初始状态下,容器被部分地填充。第一容器3被填充到该第一容器3的容量的大约60%。第二容器4被填充到该第二容器4的容量的大约35%。第三容器5被填充到该第三容器5的容量的大约35%。第四容器6被填充到该第四容器6的容量的大约40%。
[0044]
当船舶1在海上航行时,容器3、4、5、6的这种部分填充可能对所述容器3、4、5、6产生显著的损坏风险。实际上,当船舶1在海上时,船舶1经历与航行条件相关的许多运动。
[0045]
具体而言,船舶1一方面经历第一激励,即由轴线10表示的海风激励,以及经历第二激励,由图2中的轴线12表示的涌浪的激励。海风引发如下波浪:所述波浪具有相对于船舶1的纵向轴线16而与轴线10相平行的海风方向、有效海风高度和海风高峰期。类似地,涌浪激起如下波浪:所述波浪具有相对于纵向轴线16而与轴线12相平行的涌浪方向、涌浪的有效高度和涌浪的高峰期。由涌浪和海风引发的波浪的汇合产生船舶1的多模态激励,该多模态激励激起船舶1的运动。船舶1的这些运动影响容器3、4、5、6中容纳的液体,并因此,所述液体在容器3、4、5、6中经历晃荡,从而对容器壁产生冲击。当晃荡超过容器壁对晃荡进行吸收或分散的能力时,对容器3、4、5、6的壁的冲击会使容器3、4、5、6的壁劣化。现在,保持容器3、4、5、6的壁的完整性以保持容器3、4、5、6的密封特性和隔绝特性是重要的。因此,对晃荡进行确定以避免这种劣化是重要的。
[0046]
为此,图3中表示的用于对晃荡进行确定的方法200可以由船舶1实现以对由图2中的轴线14表示的单模态激励进行估计,该单模态激励等效于由海风激励10和涌浪激励12的汇合引发的船舶1的总激励。
[0047]
方法200包括以下步骤:
[0048]
步骤202:获取海风状态,该海风状态包括有效海风高度hs
windsea
、海风高峰期tp
windsea
和相对于纵向轴线16的海风方向hg
w
i
ndsea
,
[0049]
步骤204:获取涌浪状态,该涌浪状态包括涌浪的有效高度hs
swell
、涌浪的高峰期tp
swell
和相对于纵向轴线16的涌浪方向hg
swell
,
[0050]
步骤206:根据海风状态和涌浪状态,通过对总高度hs
tot
、总高峰期tp
tot
和总方向hg
tot
进行确定来确定单模态激励,
[0051]
步骤208:根据步骤206中确定的单模态激励,对与船舶1中容纳的液体的晃荡相关的数据进行确定。
[0052]
根据一个实施方式,通过部署在船舶1中的传感器获取与海风状态和涌浪状态相关的测量值来执行步骤202和204。替代性地,通过获取先前确定的涌浪状态和海风状态的预测值来执行步骤202和204。
[0053]
根据一个实施方式,在步骤206中通过对以下公式进行求解来确定总高度hs
tot
:
[0054]
[公式1]
[0055][0056]
根据一个实施方式,在步骤206中,例如通过查阅数据库或通过数字计算,通过在单模态激励中对来自浪涌的高峰期tp
swell
和海风高峰期tp
windsea
中的产生装载物的最剧烈
晃荡的高峰期进行确定来确定总高峰期tp
tot
。
[0057]
根据一个实施方式,在步骤206中,通过对来自浪涌方向hg
swell
和海风方向hg
windsea
中的、最接近于与船舶1的纵向轴线16成直角的方向18的方向进行确定来确定总方向hg
tot
。在这两个方向关于直角方向18对称的情况下,来自船舶的前部的激励被保留。
[0058]
可以通过查阅先前为船舶1建立的数据库或通过基于先前建立的数值建模的数字计算来执行步骤208,所述数值建模根据单模态激励14来表示晃荡。
[0059]
根据一个实施方式,方法200包括:根据步骤208中确定的与晃荡相关的数据和所述容器2的填充水平,来对容器2的损坏风险risk
ope
进行确定的步骤210。具体地,由以下公式来确定损坏风险risk
ope
:
[0060]
[公式2]
[0061][0062]
其中,sc是由与针对容器的填充水平fl的晃荡相关的数据产生的晃荡水平,
[0063]
prob
tk
表示根据晃荡水平sc(fl)遇到容器的内表面上的压力pres
surf
大于容器的所述内表面的阻力res
surf
的概率密度,
[0064]
surf是容器的受液体影响的内表面,以及
[0065]
t
ope
是船舶1经历海风状态以及涌浪产生针对填充水平fl的晃荡水平sc(fl)的航行操作的时间。
[0066]
定律prob
tk
是统计定律,例如gev、威布尔(weibull)、帕累托(pareto)或耿贝尔(gumbel)类型的统计定律。例如,该定律的一个、几个或所有参数是从实验室中液体运动的单模态测试限定的,或从海上单模态测量活动中限定的。
[0067]
图4示出了可以安装在船舶1上的用于对晃荡进行确定的设备300。该设备300包括中央单元302,该中央单元302被配置成执行方法200的各个步骤以对与船舶的晃荡和/或损坏船舶1的容器2的风险相关的数据进行确定。
[0068]
中央单元302连接到多个嵌入式传感器304,所述多个嵌入式传感器使得中央单元可以获得上述各种量。因此,传感器304包括,例如且非穷尽地,每个容器的填充水平的传感器306、允许中央单元302经由专用算法来对与容器3、4、5、6中的液体运动相关的影响进行检测的不同的传感器308(加速度计、应变计、变形计、声音、光)等。
[0069]
设备300还包括人机界面310。该人机界面310包括显示装置312,该显示装置312允许船舶1的操作者获得各种信息:例如,关于与通过实现方法200的各步骤而确定的晃荡、对船舶1的容器2中的一个容器损坏的风险、由传感器308获得的量(诸如容器中液体运动的强度)相关联的数据的信息;关于与这些液体运动、船舶的运动、船舶的装载物的状态或甚至气象信息相关联的冲击的信息。
[0070]
人机界面310还包括获取装置314,该获取装置314允许操作员手动地向中央单元302供给各量,通常向中央单元302供给由于船舶不包括必要的传感器或传感器被损坏而不能通过传感器获得的数据。例如,在一个实施方式中,获取装置允许操作员输入与海风状态和/或涌浪状态有关的信息。
[0071]
设备300包括数据库316。该数据库316包括例如在实验室中或从海上的船上测量活动中获得的某些量。例如,数据库316可以包括与根据单模态激励的晃荡相关的数据。具
体地,就单模态激励的振幅、频率和入射的每个值而言,数据库可以存储表示施加在容器壁上的整体应力或局部应力的数据。表示施加在容器壁上的应力的这些数据可以例如是施加在容器壁上的压力的分布,即,函数p
surf
。
[0072]
在一个实施方式中,损坏风险的计算也是预先建立的,并且数据库可以直接存储对于单模态激励的每个有效高度、高峰期和方向值而言代表损坏风险risk
ope
的数据。
[0073]
设备300还包括允许中央单元302与远程设备进行通信的通信接口318,例如以获得气象数据、船舶位置数据或其他数据。
[0074]
根据一个实施方式,中央单元302被配置为根据与晃荡和/或损坏风险相关的数据确定导航数据,所述导航数据例如船舶的航向、速度等。
[0075]
所表示的某些元件,尤其是中央单元302,可以借助于硬件部件和/或软件部件以各种形式单独地或分布式地产生。可以使用的硬件部件是定制集成电路asic、可编程逻辑阵列fpga或微处理器。软件部件可以用不同的编程语言,例如c、c 、java或vhdl进行编写。此列表并非详尽无遗。
[0076]
虽然本发明已经结合几个特定的实施方式进行了描述,但很明显,本发明并不限于此,并且本发明涵盖所描述的装置的所有技术等效物及其组合,只要后者落入本发明的范围内即可。
[0077]
动词“包含”或“包括”及其变化形式的使用不排除权利要求中所述的元件或步骤以外的元件或步骤的存在。
[0078]
在权利要求中,括号中的任何附图标记不应被解释为对权利要求的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。