技术特征:
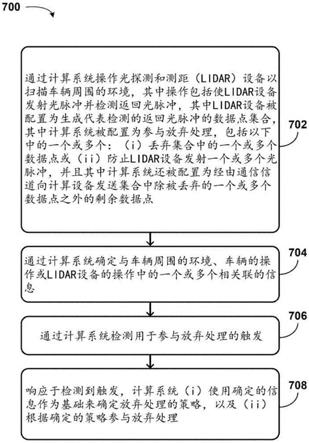
1.一种方法,包括:通过计算系统操作光探测和测距(lidar)设备来扫描车辆周围的环境,其中操作包括使lidar设备发射光脉冲并检测返回光脉冲,其中lidar设备被配置为生成表示检测返回光脉冲的数据点集合,其中计算系统被配置为参与放弃处理,放弃处理包括以下中的一个或多个:(i)丢弃集合中的一个或多个数据点或(ii)阻止lidar设备发射一个或多个光脉冲,并且其中计算系统还被配置为经由通信信道向计算设备发送集合中除被丢弃的一个或多个数据点之外的剩余数据点;通过计算系统确定与车辆周围的环境、车辆的操作或lidar设备的操作中的一个或多个相关联的信息;通过计算系统检测用于参与放弃处理的触发;以及响应于检测到触发,计算系统(i)使用确定的信息作为基础来确定关于放弃处理的策略并(ii)根据确定的策略参与放弃处理。2.根据权利要求1所述的方法,其中,确定信息包括基于以下中的一个或多个来确定信息:来自车辆的传感器系统的车载传感器数据、来自车辆外部的一个或多个传感器的外部传感器数据、来自车辆的推进系统的推进数据、来自车辆的控制系统的控制数据、来自计算设备的其他数据、表示车辆周围的环境的地图数据、指示车辆周围的环境中的交通的交通数据、指示lidar设备的温度的温度数据、指示车辆的温度的温度数据或指示车辆周围的环境的天气的天气数据。3.根据权利要求1所述的方法,其中,检测触发包括:确定与通信信道相关联的当前或预期带宽消耗等于或高于阈值带宽消耗。4.根据权利要求1所述的方法,其中,确定关于放弃处理的策略包括确定以下中的一个或多个:(i)集合中要丢弃的数据点或(ii)要被阻止发射的光脉冲。5.根据权利要求1所述的方法,其中,参与放弃处理减少或至少保持与通信信道相关联的带宽使用或过度填充。6.根据权利要求1所述的方法,其中,确定信息包括确定检测返回光脉冲的特征,其中,确定策略包括基于识别的子集包括表示具有一个或多个预定义特征的检测的返回光脉冲的数据点来识别集合的数据点的子集,以及其中,根据确定的策略参与放弃处理包括丢弃识别的子集的数据点。7.根据权利要求6所述的方法,其中,识别包括:基于识别的子集来识别子集,识别的子集包括表示具有低于阈值强度的相应强度的检测返回光脉冲的数据点。8.根据权利要求1所述的方法,其中,确定信息包括确定检测返回光脉冲的特征,其中,确定策略包括基于识别的子集包括表示彼此具有基本相同特征的检测返回光脉冲的数据点来识别集合的数据点的子集,以及其中,根据确定的策略参与放弃处理包括丢弃识别的子集的一些但不是全部数据点。9.根据权利要求1所述的方法,其中,确定信息包括确定车辆的不同传感器已经生成表示环境的特定部分的数据点,其中,确定策略包括,响应于确定车辆的不同传感器已经生成表示环境的特定部分的
数据点,应用包括以下中的一个或多个的识别处理:(i)基于识别的子集包括表示与环境的特定部分相对应的检测返回光脉冲的数据点来识别集合的数据点的子集,或者(ii)识别要向环境的特定部分发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:丢弃识别的子集中的至少一些数据点或阻止发射识别的光脉冲中的至少一些。10.根据权利要求1所述的方法,其中,确定信息包括确定车辆正在执行或预期执行的操纵,其中,确定策略包括基于确定的操纵来确定环境的偏离目标部分并应用识别处理,识别处理包括以下中的一个或多个:(i)基于识别的子集包括表示与环境的偏离目标部分相对应的检测返回光脉冲的数据点来识别集合的数据点的子集,或者(ii)识别要向环境的偏离目标部分发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:丢弃识别的子集中的至少一些数据点或阻止发射识别的光脉冲中的至少一些。11.根据权利要求10所述的方法,其中,确定操纵包括确定车辆正在或预计将朝向环境的特定部分行驶,以及其中,确定偏离目标部分包括至少基于偏离目标部分与特定部分不同来确定偏离目标部分。12.根据权利要求1所述的方法,其中,确定信息包括确定车辆周围的环境中对象的特征,其中,确定策略包括基于确定的对象的特征来确定环境的偏离目标部分并应用识别处理,识别处理包括以下中的一个或多个:(i)基于识别的子集包括表示与环境的偏离目标部分相对应的检测返回光脉冲的数据点来识别集合的数据点的子集,或者(ii)识别要向环境的偏离目标部分发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:丢弃识别的子集中的至少一些数据点或阻止发射识别的光脉冲中的至少一些。13.根据权利要求12所述的方法,其中,确定对象的特征包括以下中的一个或多个:确定对象相对于车辆的位置、确定对象为特定类型或识别对象。14.根据权利要求1所述的方法,其中,确定信息包括确定在车辆周围的环境的特定部分中未检测到对象,其中,确定策略包括:响应于确定在车辆周围的环境的特定部分中未检测到对象,应用包括以下中的一个或多个的识别处理:(i)基于识别的子集包括表示与环境的特定部分相对应的检测返回光脉冲的数据点来识别集合的数据点的子集,或者(ii)识别要向环境的特定部分发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:丢弃识别的子集中的至少一些数据点或阻止发射识别的光脉冲中的至少一些。15.根据权利要求1所述的方法,其中,确定信息包括确定与车辆周围的环境中的交通或天气中一个或多个相关联的条件,其中,确定策略包括基于确定的条件来确定环境的偏离目标部分并应用识别处理,识
别处理包括以下中的一个或多个:(i)基于识别的子集包括表示与环境的偏离目标部分相对应的检测返回光脉冲的数据点来识别集合的数据点的子集,或者(ii)识别要向环境的偏离目标部分发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:丢弃识别的子集中的至少一些数据点或阻止发射识别的光脉冲中的至少一些。16.根据权利要求15所述的方法,其中,确定条件包括确定环境的特定部分中的交通程度低于阈值交通程度,并且其中确定偏离目标部分包括基于所述确定将偏离目标部分选择为特定部分。17.根据权利要求15所述的方法,其中,确定条件包括确定环境的特定部分具有雪、雨、雨夹雪、冰雹、冰、雾或其他预定义天气条件中的一个或多个,并且其中,确定偏离目标部分包括基于所述确定将偏离目标部分选择为特定部分。18.根据权利要求1所述的方法,其中,确定策略包括应用伪随机码或轮询调度过程来选择以下中的一个或多个:(i)要丢弃的集合的一个或多个数据点或(ii)要阻止发射的光脉冲,以及其中,根据确定的策略参与放弃处理包括以下中的一个或多个:(i)丢弃根据伪随机码或轮询调度过程的应用选择的集合的数据点或(ii)阻止发射根据伪随机码或轮询调度过程的应用选择的光脉冲。19.一种计算系统,包括:一个或多个处理器;非暂时性计算机可读介质;以及存储在非暂时性计算机可读介质上且由一个或多个处理器可执行的程序指令,以:操作光探测和测距(lidar)设备来扫描车辆周围的环境,其中操作包括使lidar设备发射光脉冲并检测返回光脉冲,其中lidar设备被配置为生成表示检测返回光脉冲的数据点集合,其中计算系统被配置为参与放弃处理,放弃处理包括以下中的一个或多个:(i)丢弃集合中的一个或多个数据点或(ii)阻止lidar设备发射一个或多个光脉冲,并且其中计算系统还被配置为经由通信信道向计算设备发送集合中除被丢弃的一个或多个数据点之外的剩余数据点;确定与车辆周围的环境、车辆的操作或lidar设备的操作中的一个或多个相关联的信息;检测用于参与放弃处理的触发;和响应于检测到触发,(i)使用确定的信息作为基础来确定关于放弃处理的策略并(ii)根据确定的策略参与放弃处理。20.一种车辆,包括:光探测和测距(lidar)设备;以及计算系统,被配置为:操作lidar设备来扫描车辆周围环境,其中操作包括使lidar设备发射光脉冲并检测返回光脉冲,其中lidar设备被配置为生成表示检测返回光脉冲的数据点集合;确定与车辆周围的环境、车辆的操作或lidar设备的操作中的一个或多个相关联的信息;
检测用于参与放弃处理的触发;和响应于检测到触发,使用确定的信息作为基础来确定关于放弃处理的策略,并根据确定的策略参与放弃处理,其中放弃处理包括以下中的一个或多个:(i)丢弃集合中的一个或多个数据点或(ii)阻止lidar设备发射一个或多个光脉冲。
技术总结
示例实现可以涉及确定与光检测和测距(LIDAR)设备相关联的放弃处理的策略。具体而言,LIDAR设备可以发射光脉冲并检测返回光脉冲,并且可以生成表示检测返回光脉冲的数据点的集合。放弃处理可以涉及计算系统丢弃集合的数据点和/或阻止LIDAR设备发射光脉冲。因此,计算系统可以检测参与放弃处理的触发,并且可以响应地(i)使用与车辆周围的环境、车辆的操作和/或LIDAR设备的操作相关联的信息作为确定放弃处理的策略的基础,以及(ii)根据确定的策略参与放弃处理。策略参与放弃处理。策略参与放弃处理。
技术研发人员:B.加森德 S.麦克洛斯基 S.奥斯本 N.阿姆斯特朗-克鲁斯
受保护的技术使用者:伟摩有限责任公司
技术研发日:2020.04.20
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。