技术特征:
1.一种基于排列熵的uwb生命体征信号探测方法,包括:对来自uwb雷达的回波信号进行预处理;利用排列熵算法执行距离检测;以及执行回波信号的选择和显示,其中,所述排列熵算法的具体步骤为:(1)假设雷达回波延迟时间为m1,对于长度为n的信号的扫描时间序列x[m1,i]={y(1),y(2),...,y(i)},i=1,2,3,...,n,y∈w
m
×
n
;a.令其中τ
d
为延迟时间(τ
d
=1),q为嵌入维度(q=3),k=n
‑
(q
‑
1)τ
d
,进行相空间重构:b.对于相空间矩阵的每一行皆为重构分量,将第j个重构分量中的元素按升序排列,得到新的重构分量如下:x(i (j1‑
1)τ
d
)≤x(i (j2‑
1)τ
d
)≤...≤x(i (j
q
‑
1)τ
d
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)若其中元素相等,则按j值大小排序;相空间矩阵的任意重构分量皆可得到一组序列:s(l)=(j1,j2,...,j
q
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,l=1,2,...,k,k≤q!,m维序列产生m!种s(l)排序;c.计算每种s(l)序列不同排序的概率p
k
,所有的排序的概率和为1,则x[m1,i]的排列熵按shannon熵的形式定义为:对排列熵h
p
进行归一化可表示为:h
p
(m)=h
p
(m)/ln(m!)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中h
p
的取值范围为[0,1],h
p
的大小表示了信号的扫描时间序列x[m1,i]的复杂性,h
p
的值越小,时间序列变化越规则;(2)在雷达回波矩阵w
m
×
n
中,人类目标位置范围的信号的扫描时间方向数据变化相对规则,所以人体目标区域对应的pe值较低,a.可以通过寻找pe值的最小值来确定人类目标的位置p
pos
,从而得到目标的距离信息:其中v=3
×
108m/s和t
f
表示雷达回波延迟时间方向的采样间隔;b.基于pe值,可以充分利用分布在相邻距离门中的回波信号增加信号长度从而提高雷达效率;
c.假设人体胸腔的横向距离d
tho
,而后根据雷达回波延迟时间方向的采样间隔t
f
,可以计算出人体胸腔距离在接受脉冲中占据的点数,即p
tho
=2d
tho
/vt
f
,其中v=3
×
108m/s,用ψ表示生命体征信号矩阵,然后可以将其表示为:0≤p
pos
,p
tho
≤m,n=1,2,...,nd.通过将人类目标的位置p
pos
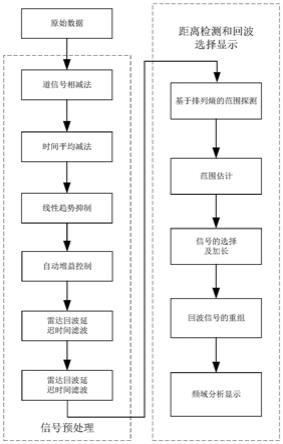
相邻距离门的回波信号排列成行重组,获得生命体征信号向量ζ;通过利用fft变换进行频域分析,获得生命体征(呼吸、心跳)信号。2.根据权利要求1所述的uwb生命体征信号探测方法,其中,所述距离检测包括范围探测和范围估计,并且所述回波信号的选择和显示包括回波信号选择及加长、回波信号的重组以及频域分析显示。3.根据权利要求1所述的uwb生命体征信号探测方法,其中,所述排列熵算法将人类目标的位置相邻距离门的回波信号排列成行重组。4.根据权利要求1所述的uwb生命体征信号探测方法,其中,所述预处理包括到信号相减法、时间平均减法、线性趋势抑制、自动增益控制和雷达回波延迟时间滤波和扫描时间滤波。5.一种基于排列熵的uwb生命体征信号探测装置,包括:预处理模块,用于对来自uwb雷达的回波信号进行预处理;距离检测模块,用于利用排列熵算法执行距离检测;以及回波信号选择和显示模块,用于执行回波信号的选择和显示,其中所述距离检测模块的具体操作为:(1)假设雷达回波延迟时间为m1,对于长度为n的信号的扫描时间序列x[m1,i]={y(1),y(2),...,y(i)},i=1,2,3,...,n,y∈w
m
×
n
;a.令其中τ
d
为延迟时间(τ
d
=1),q为嵌入维度(q=3),k=n
‑
(q
‑
1)τ
d
,进行相空间重构:b.对于相空间矩阵的每一行皆为重构分量,将第j个重构分量中的元素按升序排列,得到新的重构分量如下:x(i (j1‑
1)τ
d
)≤x(i (j2‑
1)τ
d
)≤...≤x(i (j
q
‑
1)τ
d
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)若其中元素相等,则按j值大小排序;相空间矩阵的任意重构分量皆可得到一组序列:s(l)=(j1,j2,...,j
q
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,l=1,2,...,k,k≤q!,m维序列产生m!种s(l)排序;
c.计算每种s(l)序列不同排序的概率p
k
,所有的排序的概率和为1,则x[m1,i]的排列熵按shannon熵的形式定义为:对排列熵h
p
进行归一化可表示为:h
p
(m)=h
p
(m)/ln(m!)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中h
p
的取值范围为[0,1],h
p
的大小表示了信号的扫描时间序列x[m1,i]的复杂性,h
p
的值越小,时间序列变化越规则;(2)在雷达回波矩阵w
m
×
n
中,人类目标位置范围的信号的扫描时间方向数据变化相对规则,所以人体目标区域对应的pe值较低,a.可以通过寻找pe值的最小值来确定人类目标的位置p
pos
,从而得到目标的距离信息:其中v=3
×
108m/s和t
f
表示雷达回波延迟时间方向的采样间隔;b.基于pe值,可以充分利用分布在相邻距离门中的回波信号增加信号长度从而提高雷达效率;c.假设人体胸腔的横向距离d
tho
,而后根据雷达回波延迟时间方向的采样间隔t
f
,可以计算出人体胸腔距离在接受脉冲中占据的点数,即p
tho
=2d
tho
/vt
f
,其中v=3
×
108m/s,用ψ表示生命体征信号矩阵,然后可以将其表示为:0≤p
pos
,p
tho
≤m,n=1,2,...,nd.通过将人类目标的位置p
pos
相邻距离门的回波信号排列成行重组,获得生命体征信号向量ζ;通过利用fft变换进行频域分析,获得生命体征(呼吸、心跳)信号。6.根据权利要求5所述的uwb生命体征信号探测装置,其中,所述距离检测包括范围探测和范围估计,并且所述回波信号的选择和显示包括回波信号选择及加长、回波信号的重组以及频域分析显示。7.根据权利要求5所述的uwb生命体征信号探测装置,其中,所述排列熵算法将人类目标的位置相邻距离门的回波信号排列成行重组。8.根据权利要求5所述的uwb生命体征信号探测装置,其中,所述预处理包括到信号相减法、时间平均减法、线性趋势抑制、自动增益控制和雷达回波延迟时间滤波和扫描时间滤波。
技术总结
本公开开于基于排列熵的UWB生命体征信号探测方法和装置。按照所述方法,对来自UWB雷达的回波信号进行预处理,利用排列熵算法执行距离检测,并且执行回波信号的选择和显示。根据本发明的方法和装置,能够准确得到人体的位置、呼吸和心跳频率信息,对于雷达的效率大幅度提高,且尺寸小,可实现自动识别,具有很大优势。势。势。
技术研发人员:王海燕 赵尤信 杨帧 齐庆杰 杨美乐 刘英杰 刘思昀 程会峰
受保护的技术使用者:辽宁工程技术大学
技术研发日:2021.08.24
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。