1.本发明涉及医疗器械技术领域,特别涉及一种裂隙灯辅助手臂托架。
背景技术:
2.裂隙灯显微镜(简称“裂隙灯”),是眼科检查必不可少的重要仪器。裂隙灯显微镜由照明系统和双目显微镜组成,它不仅能使表浅的病变观察得十分清楚,而且可以调节焦点和光源宽窄,做成“光学切面”,使深部组织的病变也能清楚地显现。其构造主要由两部分构成,即“裂隙灯”与“显微镜”。为了便于裂隙光源从不同的角度照射眼睛各部位,以及显微镜从不同的角度观察眼睛,要求裂隙灯与显微镜在机械上都具有足够的左右摆动角。机械构造除了具备有上述的左右摆动功能外,还要具备三维可调的移动工作台;颌架装置可以固定病人头颅,颌架上的颌托上下可调以适应不同病人的头颅长短;固视灯可避免病人的眼睛不自觉的转动。
3.在裂隙灯的使用过程中,医生需要一只手操控裂隙灯,同时,另一只手对患者进行一些必要操作,操作过程中手臂是悬空状态,如检查时间较长,操作医生的手臂会发酸,肩部不适感增强,检查变慢,工作效率降低,患者就医体验下降。
4.申请号为cn201020148015.x的专利提出了一种裂隙灯手臂托架,包括卡槽,在所述卡槽上固定有可调支撑杆,在所述支撑杆的顶端活动连接有横杆,所述横杆可做水平移动,在所述横杆的前端通过轴承与手臂托相连,在所述卡槽上设有紧固旋钮,该实用新型虽然结构简单,但是整体结构为刚性连接结构,针对不同的医生或检查者,需要调节不同的高度或姿态,调节比较麻烦,耗费时间,为此,设计一种柔性的、自适应的自动调节的手臂托架,成了一个亟待解决的问题。
技术实现要素:
5.针对上述技术问题,本发明的采用的技术方案为:一种裂隙灯辅助手臂托架,包括伸缩支架组件、托架组件、柔性蓄力组件、位移感应器、手臂托,伸缩支架组件包括壳体、端盖、第一电机、第一丝杠、导槽;端盖固定安装在壳体上;第一电机固定安装在端盖上;壳体的内部中空;壳体内部的空间设置有一个第一丝杠,第一丝杠与第一电机的输出轴固定连接;壳体内壁上设置有四个圆周均布的导槽;托架组件包括带有四个圆周均布的导向齿的第二导杆、支板、第三连杆、柔性金属管、第三支座、第四连杆;支板固定安装在第二导杆上;第三连杆、柔性金属管和第三支座分别固定安装在支板上;第四连杆的中部铰接在第三支座上;柔性蓄力组件包括下底板、第四支座、齿条、第五支座、上底板、第一导轨、第三滑块、第三齿轮;第四支座固定安装在下底板上;第五支座固定安装在上底板上;下底板和上底板上分别固定安装有一个齿条;第一导轨固定安装在下底板上;第三滑块滑动安装在第一导轨上;第三齿轮转动安装在第三滑块上;第三齿轮分别与两个齿条啮合;所述的第二导杆滑动安装在壳体内,且每个导向齿均与一个导槽滑动配合;第二导杆内部中空且内壁上设置有内螺纹;第二导杆通过内螺纹与第一丝杠配合;所述的第四支座转动安装在第三连杆上;
所述的第五支座转动安装在第四连杆的第一端;所述的手臂托固定安装在第四连杆的第二端;所述的位移感应器固定安装在柔性金属管上。
6.进一步地,伸缩支架组件还包括支腿、支脚、锁紧盘、锁紧销、第一弹簧、第一导杆、锁紧套、第一连杆、第二连杆、第二弹簧、第一滑块、第一齿轮、第一支座、第二齿轮、卡位销、第二支座、卡位孔;第二齿轮转动安装在壳体上;四个圆周均布的第一支座固定安装在壳体上;每个第一支座上转动安装有一个第一齿轮;每个第一齿轮均与第二齿轮啮合;每个第一齿轮上固定安装有一个支腿;每个支腿中部转动安装有一个第一连杆;每个第一连杆上转动安装有一个第二连杆;每个第二连杆均与第一滑块转动安装在一起;第一滑块滑动安装在壳体上;第二弹簧套在壳体上,且第二弹簧的两端分别与第一滑块和壳体固定连接;每个支腿上固定安装有一个锁紧销和一个支脚;四个圆周均布的第二支座固定安装在壳体上;每个第二支座上滑动安装有一个第一导杆;所有第一导杆的第一端均与锁紧套固定连接;所有第一导杆的第二端均与锁紧盘固定连接;每个第一导杆上套设有一个第一弹簧;每个第一弹簧的两端分别与第二支座和锁紧盘固定连接;锁紧套上固定安装有一圈圆周均布的卡位销;第二齿轮上设置有一圈圆周均布的卡位孔;卡位孔的数量是卡位销的数量的整数倍;卡位销与卡位孔滑动配合;锁紧盘上设置有一圈圆周均布的、可插入锁紧销的锁紧孔。
7.进一步地,第一齿轮与第二齿轮为旋向相同的、螺旋角均为45
°
的斜齿轮。
8.进一步地,卡位孔的数量是第二齿轮齿数的整数倍。
9.进一步地,支脚为防滑橡胶球或真空吸盘。
10.进一步地,柔性蓄力组件还包括钢丝绳、滑轮、第二滑块、第三弹簧、第一楔块、第二电机、支柱、第二丝杠、第二楔块、第二导轨;钢丝绳有两条,每条钢丝绳的第一端固定安装在下底板上,每条钢丝绳的第二端固定安装在上底板上;两个支柱固定安装在第三滑块上;第二导轨固定安装在两个支柱上;第二电机固定安装在第二导轨上;第二丝杠固定安装在第二电机的输出轴上;第二楔块滑动安装在第二导轨内,且第二楔块内置有与第二丝杠配合的内螺纹;两个第一楔块分别滑动安装在第二导轨内;两个第一楔块关于第二楔块的轴线呈对称布置,且每个第一楔块上的楔面均与第二楔块上的楔面接触配合;每个第一楔块上固定安装有一个第三弹簧;每个第三弹簧上固定安装有一个第二滑块;每个第二滑块均与第二导轨滑动配合;每个第二滑块上转动安装有一个滑轮;每个滑轮与一条钢丝绳接触配合。
11.进一步地,位移感应器包括箱体、第一电容板、第二电容板、第三导杆、夹持头;箱体与柔性金属管固定连接;两个第三导杆固定安装在箱体内;第一电容板滑动安装在两个第三导杆上;两个第二电容板分别固定安装在箱体内,且两个第二电容板位于第一电容板的两侧;夹持头固定安装在第一电容板上。
12.进一步地,夹持头用于与裂隙灯的颌托固定连接。
13.进一步地,手臂托为碗形托或马鞍形托。
14.进一步地,碗形托的内表面为球面;马鞍形托的内表面为马鞍面。
15.本发明与现有技术相比的有益效果是:(1)本发明的伸缩支架组件,通过锁紧套上设置的卡位销与第二齿轮上设置的卡位孔的配合,可实现多档位位姿调节,且该调节为粗调节;(2)本发明的第一弹簧、第二弹簧的设置,可实现伸缩支架组件的快速展开与收纳,操作简单,使用方便;(3)本发明的第一电机与第一丝杠的设置,可实现托架组件的位姿调节,
且该调节为精调节;(4)本发明的柔性蓄力组件,利用了力的分解原理,可实现较大的蓄力值;(5)本发明的柔性蓄力组件与托架组件之间的组合采用了杠杆原理,可实现医生手臂的自适应托举;(6)本发明的柔性蓄力组件的蓄力值的大小,可通过第二电机调节,自动适应不同体重的医生;(7)本发明的位移感应器,通过与裂隙灯颌托的连接,可动态感知针对不同检查者的颌托运动规律,进而通过第一电机,实现托架组件的动态跟踪。
附图说明
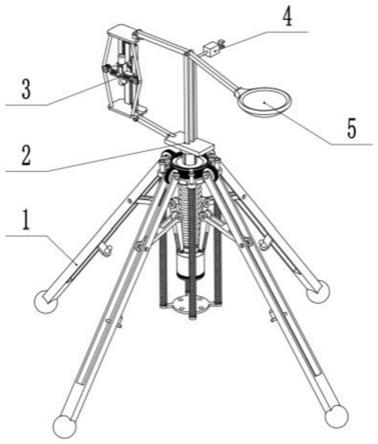
16.图1为本发明整体结构的工作状态示意图一。
17.图2为本发明整体结构的工作状态示意图二。
18.图3为本发明整体结构的收纳状态示意图。
19.图4为本发明伸缩支架组件的结构示意图。
20.图5为本发明伸缩支架组件的局部结构放大示意图。
21.图6为本发明第二齿轮的零件结构示意图。
22.图7为本发明托架组件的局部结构放大示意图。
23.图8为本发明柔性蓄力组件的结构示意图。
24.图9为本发明位移感应器的结构示意图。
25.图中:1
‑
伸缩支架组件;2
‑
托架组件;3
‑
柔性蓄力组件;4
‑
位移感应器;5
‑
手臂托;101
‑
支腿;102
‑
支脚;103
‑
锁紧盘;104
‑
锁紧销;105
‑
第一弹簧;106
‑
第一导杆;107
‑
锁紧套;108
‑
第一连杆;109
‑
第二连杆;110
‑
第二弹簧;111
‑
第一滑块;112
‑
壳体;113
‑
端盖;114
‑
第一电机;115
‑
第一齿轮;116
‑
第一支座;117
‑
第二齿轮;118
‑
第一丝杠;119
‑
卡位销;120
‑
第二支座;11201
‑
导槽;11701
‑
卡位孔;201
‑
第二导杆;202
‑
支板;203
‑
第三连杆;204
‑
柔性金属管;205
‑
第三支座;206
‑
第四连杆;20101
‑
导向齿;301
‑
下底板;302
‑
第四支座;303
‑
钢丝绳;304
‑
齿条;305
‑
滑轮;306
‑
第二滑块;307
‑
第三弹簧;308
‑
第一楔块;309
‑
第五支座;310
‑
上底板;311
‑
第一导轨;312
‑
第二电机;313
‑
第三滑块;314
‑
支柱;315
‑
第二丝杠;316
‑
第二楔块;317
‑
第三齿轮;318
‑
第二导轨;401
‑
箱体;402
‑
第一电容板;403
‑
第二电容板;404
‑
第三导杆;405
‑
夹持头。
具体实施方式
26.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
27.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
28.图1至图9为本发明的优选实施例。
29.如图4、图5和图6所示,在伸缩支架组件1中,端盖113固定安装在壳体112上;第一电机114固定安装在端盖113上;壳体112的内部中空;壳体112内部的空间设置有一个第一丝杠118,第一丝杠118与第一电机114的输出轴固定连接;壳体112内壁上设置有四个圆周均布的导槽11201;第二齿轮117转动安装在壳体112上;四个圆周均布的第一支座116固定安装在壳体112上;每个第一支座116上转动安装有一个第一齿轮115;每个第一齿轮115均
与第二齿轮117啮合;每个第一齿轮115上固定安装有一个支腿101;每个支腿101中部转动安装有一个第一连杆108;每个第一连杆108上转动安装有一个第二连杆109;每个第二连杆109均与第一滑块111转动安装在一起;第一滑块111滑动安装在壳体112上;第二弹簧110套在壳体112上,且第二弹簧110的两端分别与第一滑块111和壳体112固定连接;每个支腿101上固定安装有一个锁紧销104和一个支脚102;四个圆周均布的第二支座120固定安装在壳体112上;每个第二支座120上滑动安装有一个第一导杆106;所有第一导杆106的第一端均与锁紧套107固定连接;所有第一导杆106的第二端均与锁紧盘103固定连接;每个第一导杆106上套设有一个第一弹簧105;每个第一弹簧105的两端分别与第二支座120和锁紧盘103固定连接;锁紧套107上固定安装有一圈圆周均布的卡位销119;第二齿轮117上设置有一圈圆周均布的卡位孔11701;卡位孔11701的数量是卡位销119的数量的整数倍;卡位销119与卡位孔11701滑动配合;锁紧盘103上设置有一圈圆周均布的、可插入锁紧销104的锁紧孔;第一齿轮115与第二齿轮117为旋向相同的、螺旋角均为45
°
的斜齿轮,且第一齿轮115的齿数为50,第二齿轮117的齿数为119;卡位孔11701的数量是第二齿轮117齿数的整数倍,在本实施例中,卡位孔11701和卡位销119的数量均为119;支脚102为防滑橡胶球或真空吸盘,在本实施例中,支脚102采用了防滑橡胶球。
30.如图2和图7所示,在托架组件2中,第二导杆201带有四个圆周均布的导向齿20101;支板202固定安装在第二导杆201上;第三连杆203、柔性金属管204和第三支座205分别固定安装在支板202上;第四连杆206的中部铰接在第三支座205上。
31.如图8所示,在柔性蓄力组件3中,第四支座302固定安装在下底板301上;第五支座309固定安装在上底板310上;下底板301和上底板310上分别固定安装有一个齿条304;第一导轨311固定安装在下底板301上;第三滑块313滑动安装在第一导轨311上;第三齿轮317转动安装在第三滑块313上;第三齿轮317分别与两个齿条304啮合;钢丝绳303有两条,每条钢丝绳303的第一端固定安装在下底板301上,每条钢丝绳303的第二端固定安装在上底板310上;两个支柱314固定安装在第三滑块313上;第二导轨318固定安装在两个支柱314上;第二电机312固定安装在第二导轨318上;第二丝杠315固定安装在第二电机312的输出轴上;第二楔块316滑动安装在第二导轨318内,且第二楔块316内置有与第二丝杠315配合的内螺纹;两个第一楔块308分别滑动安装在第二导轨318内;两个第一楔块308关于第二楔块316的轴线呈对称布置,且每个第一楔块308上的楔面均与第二楔块316上的楔面接触配合;每个第一楔块308上固定安装有一个第三弹簧307;每个第三弹簧307上固定安装有一个第二滑块306;每个第二滑块306均与第二导轨318滑动配合;每个第二滑块306上转动安装有一个滑轮305;每个滑轮305与一条钢丝绳303接触配合。
32.如图9所示,在位移感应器4中,箱体401与柔性金属管204固定连接;两个第三导杆404固定安装在箱体401内;第一电容板402滑动安装在两个第三导杆404上;两个第二电容板403分别固定安装在箱体401内,且两个第二电容板403位于第一电容板402的两侧;夹持头固定安装在第一电容板402上;夹持头用于与裂隙灯的颌托固定连接。
33.如图1、图2和图3所示,第二导杆201滑动安装在壳体112内,且每个导向齿20101均与一个导槽11201滑动配合;第二导杆201内部中空且内壁上设置有内螺纹;第二导杆201通过内螺纹与第一丝杠118配合;第四支座302转动安装在第三连杆203上;第五支座309转动安装在第四连杆206的第一端;手臂托5固定安装在第四连杆206的第二端;手臂托5为碗形
托或马鞍形托;碗形托的内表面为球面;马鞍形托的内表面为马鞍面;在本实施例中,手臂托5采用了碗形托。
34.本发明的工作原理:本发明的裂隙灯辅助手臂托5架使用前的状态如图3所示,使用时,手抬起锁紧套107,使得卡位销119与第二齿轮117上的卡位孔11701脱离配合,同时,第一导杆106带动锁紧盘103移动,使得锁紧盘103上的锁紧孔与锁紧销104脱离配合,此时,第二弹簧110伸展,驱动第一滑块111沿着壳体112快速移动,并最终于端盖113接触;在这个过程中,第二连杆109通过第一连杆108驱动支腿101展开,且使用者可根据实际场景,手动拉动支腿101,由于支腿101固定安装在第一齿轮115上,而所有第一齿轮115均与第二齿轮117啮合,所以在第一齿轮115和第二齿轮117的约束下,所有支腿101的运动是同步的,当调节好支腿101的角度后,手动释放锁紧套107,在第一弹簧105的作用下,锁紧套107回弹,使得卡位销119插入第二齿轮117的卡位孔11701中,牢牢地锁死第二齿轮117,使第二齿轮117不能转动,第二齿轮117被锁死的情况下,四个第一齿轮115也不能转动,与第一齿轮115固定连接的支腿101随之被锁定,如图1和图2所示。
35.本发明的裂隙灯辅助手臂托5架使用完毕后,按照上述的逆运动,先手动抬升锁紧套107,接着手动闭合支腿101,支腿101归位后,释放锁紧套107,锁紧套107回弹,并最终使得四个支腿101上的锁紧销104牢牢地插入锁紧盘103上的锁紧孔内,使得整个伸缩支架组件1锁死。
36.伸缩支架组件1中的第一电机114,通过驱动第一丝杠118,带动托架组件2上升或下降;柔性金属管204可手动调节成合适的形状,使得其上的位移感应器4中的夹持头可以夹持在颌托上,当颌托针对不同的检查者做适应性移动时,颌托会带动夹持头上下移动,进而使得第一电容板402与两个第二电容板403之间的距离发生变化,托架组件2总是随着第一电容板402电容值升高的一侧运动,运动至第一电容板402两侧的电容值相同时停止。
37.关于柔性蓄力组件3,当医生的手臂放置在手臂托5上时,手臂托5受力,此时,通过第四连杆206,撬动第三支座205另一侧的第五支座309,第五支座309带动上底板310运动,进一步地,与上底板310连接的齿条304会驱动第三齿轮317转动,由于与下底板301连接的齿条304固定不动,故第三齿轮317会带着第三滑块313沿着第一导轨311往复移动,这种移动可以确保两个滑轮305与对应的钢丝绳303的接触点始终为该钢丝绳303的中点;当上底板310和下底板301距离变大时,钢丝绳303与上底板310或下底板301的版面夹角会变大,此时第三弹簧307的弹力在钢丝绳303上的分力会很大,而两个钢丝绳303的分力的合力,就是手臂托5受力的平衡力;通过第二电机312驱动第二丝杠315转动,进而驱动第二楔块316移动,第二楔块316可推动其两侧的第一楔块308同步运动,进而可同步改变两侧的第三弹簧307的压缩量,以此来灵活的控制手臂托5受力的平衡力大小。
38.手臂托5为碗形托时,用于放置肘关节;手臂托5为马鞍形托时,用于放置手臂。
39.本发明不局限上述具体实施方式,所属技术领域的技术人员从上述构思出发,不经过创造性的劳动,做出的种种变换,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。