技术特征:
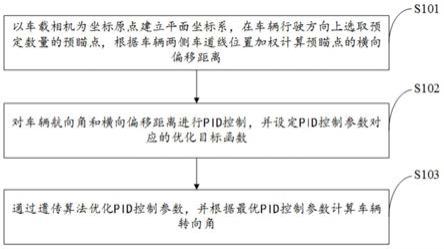
1.一种车道保持控制方法,其特征在于,包括:以车载相机为坐标原点建立平面坐标系,在车辆行驶方向上选取预定数量的预瞄点,根据车辆两侧车道线位置加权计算预瞄点的横向偏移距离;对车辆航向角和横向偏移距离进行pid控制,并设定pid控制参数对应的优化目标函数;通过遗传算法优化pid控制参数,并根据最优pid控制参数计算车辆转向角。2.根据权利要求1所述的方法,其特征在于,所述根据车辆两侧车道线位置加权计算预瞄点的横向偏移距离包括:计算同一直线上预定数量的预瞄点相对于两侧车道线的横向偏移距离,将预瞄点的横向偏移距离乘以相应的权重系数,对加权后各预瞄点的横向偏移距离求和。3.根据权利要求1所述的方法,其特征在于,所述设定pid控制参数对应的优化目标函数包括:以车辆行驶时间分别乘以航向角的误差绝对值积分、横向偏离距离的误差绝对值积分,对两者的乘积求和作为pid优化目标函数。4.根据权利要求1所述的方法,其特征在于,所述通过遗传算法优化pid控制参数包括:构建pid控制参数对应的种群,选择相应的算子、多点交叉和变异选择,基于pid优化目标函数,迭代计算出最优pid控制参数。5.根据权利要求1所述的方法,其特征在于,所述根据最优pid控制参数计算车辆转向角具体为:根据公式计算转向角:s=kp*(e r) ki(e r) kd(e r);式中,s为转向角,kp为pid比例,ki为pid积分,kd为pid微分,e为车辆航向角,r为横向距离。6.一种车道保持控制系统,其特征在于,包括:预瞄点选取模块,用于以车载相机为坐标原点建立平面坐标系,在车辆行驶方向上选取预定数量的预瞄点,根据车辆两侧车道线位置加权计算预瞄点的横向偏移距离;pid控制模块,用于选取车辆航向角和横向偏移距离进行pid控制,并设定pid控制参数对应的优化目标函数;转向角计算模块,用于通过遗传算法优化pid控制参数,并根据最优pid控制参数计算车辆转向角。7.根据权利要求6所述的系统,其特征在于,所述设定pid控制参数对应的优化目标函数包括:以车辆行驶时间分别乘以航向角的误差绝对值积分、横向偏离距离的误差绝对值积分后,对两者的乘积求和作为pid优化目标函数。8.根据权利要求6所述的系统,其特征在于,所述根据最优pid控制参数计算车辆转向角具体为:根据公式计算转向角:s=kp*(e r) ki(e r) kd(e r);式中,s为转向角,kp为pid比例,ki为pid积分,kd为pid微分,e为车辆航向角,r为横向
距离。9.一种终端设备,包括存储器、处理器以及存储在所述所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5任一项所述车道保持控制方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至5任一项所述车道保持控制方法的步骤。
技术总结
本发明提供一种车道保持控制方法、系统、电子设备及存储介质,该方法包括:以车载相机为坐标原点建立平面坐标系,在车辆行驶方向上选取预定数量的预瞄点,根据车辆两侧车道线位置加权计算预瞄点的横向偏移距离;对车辆航向角和横向偏移距离进行PID控制,并设定PID控制参数对应的优化目标函数;通过遗传算法优化PID控制参数,并根据最优PID控制参数计算车辆转向角。从而可以实现车辆最优控制参数的输出,对车辆偏离车道线进行主动控制,提升车辆控制的准确性和稳定性,保障行车安全。保障行车安全。保障行车安全。
技术研发人员:朱敦尧 周风明 郝江波
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:2021.08.23
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。