1.本发明属于船舶信息共享技术领域,具体涉及一种针对雾霾天气下或能见度较低情况下的无人船信息共享装置。
背景技术:
2.随着全球经济一体化的发展,海洋成为世界各国交通运输、发展贸易的一条纽带。航运业发展带来了船舶交通流量的显著增加,同时船舶大型化也对水域通航条件提出了更高的要求,航运业的激烈竞争促使船舶运输追求更高的营运效率。如何在保证运输安全的前提下,提高船舶的通航效率、减少意外损失、保证航行效率,一直是船舶运输业所重点关注的。但近年来,由空气污染引起的雾霾问题频发,导致船舶在航行过程中可视距离不足,因而给船舶避让、导航和定位带来了极大的困难,为船舶的安全航行带来了隐患。以往在大雾天气或其他能见度较低情况下,船舶通过与其他船舶的无线电通讯来进行位置确定,但由于船舶通讯受限、小目标避险困难、定位粗略等问题,使得航行船舶对精确信息的处理陷入性能瓶颈,无法提供精准的助航服务。
技术实现要素:
3.本发明要解决的技术问题在于针对上述现有技术存在的不足,提供一种基于无人船的信息共享系统,它能够自动采集前方航行水域信息,包括位置信息、图像信息、障碍物距离信息等,通过云服务器进行数据融合后,将监测信息共享给航道上其他船舶,最大限度消除船舶航行盲区,为船舶安全航行创造条件。
4.本发明为解决上述提出的技术问题所采用的技术方案为:
5.一种基于无人船的信息共享系统,包括安装于无人船上的精准定位模块、小目标识别模块、信息共享模块;
6.所述精准定位模块采用基于差分定位的gps定位方法,提供准确的无人船位置信息;
7.所述小目标识别模块用于采集无人船前端的障碍物相对距离信息、图像信息;并根据采集的障碍物相对距离信息并结合所述精准定位模块获得的当前无人船位置信息,精准识别目标障碍物的位置信息;并对获取的图像信息进行视频目标的信息提取,包括视频目标识别、像素坐标与摄像机坐标转换;
8.所述信息共享模块将无人船采集到的无人船位置信息、障碍物位置信息、视频目标信息通过云服务器进行数据融合,然后将融合后的信息共享给航道上其他船舶。
9.上述方案中,所述精准定位模块包括电罗经装置、gps系统和差分gps系统,所述电罗经装置、gps系统和差分gps系统均通过无线网络与所述信息共享模块连接;所述基于差分定位的gps定位方法是将gps系统、差分gps系统得到的位置参数通过实时推算进行位置修正,得到无人船初次位置,初次位置得到后,将岸上基准站定时发送的改正数和无人船初次位置进行联合计算,来修正测试结果,从而获得精度较高的无人船定位信息;所述电罗经
装置提供的参数,用于保证无人船航行时不发生航向偏移,确定基本航行方向稳定、正确。
10.上述方案中,所述基于差分定位的gps定位方法具体包括以下步骤:
11.1)岸上基准站和移动站(无人船)位置采用载波相位定位法,进行观测;岸上基准站伪距方程为
[0012][0013]
移动站(无人船)伪距方程为
[0014][0015]
其中,λ为载波波长;
[0016]
分别是岸上基准站和移动站(无人船)对第j颗卫星伪距观测值;分别是岸上基准站和移动站(无人船)接收时,第j号卫星载波整周模糊度;
[0017]
分别是岸上基准站和移动站(无人船)第j颗卫星载波相位观测量;是岸上基准站到卫星的真实距离,为已知数据;
[0018]
是和间的差值,称为载波相位改正数;
[0019]
2)移动站(无人船)通过载波相位改正数进行差分定位,修正方程为:
[0020][0021]
其中,为移动站(无人船)到卫星的真实距离,为定位作业中待求值;dρ是移动站和参考站钟差引起的残差;
[0022]
3)通过式(1)
‑
(3),可得
[0023][0024]
根据式(4),通过对载波相位模糊度的解算,可以求得移动站(无人船)位置坐标,即
[0025]
上述方案中,移动站(无人船)位置坐标得到后,将得到的联合进行联合计算,设定多层级神经网络计算,最后得到精准的位置坐标。
[0026]
上述方案中,所述小目标识别模块包括安装在无人船上的雷达、摄像机、超声测距装置;所述雷达和摄像机用于主动探测周边环境,在视距不佳情况下对小目标障碍物进行探测;所述超声测距装置用于测定障碍物与无人船的距离;所述雷达、摄像机、超声测距装置均通过无线网络与云服务器连接。
[0027]
上述方案中,所述摄像机采集视频信息后,经由所述信息共享模块进行图像融合分析,进一步判断障碍物的种类及危险性。
[0028]
上述方案中,所述小目标识别模块进行视频目标识别,是采用基于深度学习框架的darknet网络模型,结合yolov3算法,实现船舶的类型识别;具体包括以下步骤:
[0029]
1)图像输入:通过设计捕获区域,在目标质心进入区域后进行捕获,并给予捕获目标编号;
[0030]
2)特征提取:提取捕获目标特征,包括周长、面积、灰度值等,根据目标特性进行微调;
[0031]
3)模型学习:将输入图像数据作为学习样本,进行模板匹配模型再学习;
[0032]
4)匹配定位:根据标准模板,将捕获图像目标区域经旋转平移转到标准位置;
[0033]
5)分类识别:将捕获的障碍物目标由匹配后,进行分类,并标注不同类别。
[0034]
6)输出结果:完成障碍物种类判别,输出结果。
[0035]
上述方案中,所述小目标识别模块进行像素坐标与摄像机坐标转换,是指完成视频目标识别中障碍物坐标的坐标系转换,具体方法为:
[0036]
采用较为理想的针孔成像模型,假设来自三维空间的光线均由一个小孔光学逆映射至一个二维平面,且摄像机水平安装,俯仰角、侧倾角和横摆角均为0
°
,摄像机离水面的安装高度为h,为此需要对摄像机成像模型的坐标系进行空间变换,像素坐标转换成图像坐标系公式为:
[0037][0038]
式中,u为像素坐标系横坐标,v为像素坐标系纵坐标,u0为像素坐标系横坐标原点,v0为像素坐标系纵坐标原点,x为图像坐标系横坐标,y为图像坐标系纵坐标,dx为x轴上单个像素点的物理尺寸,dy为y轴上单个像素点的物理尺寸;图像坐标系转换成摄像机坐标系公式为:
[0039][0040]
式中,x为图像坐标系横坐标,y为图像坐标系纵坐标,f为摄像机焦距,x
c
为摄像机坐标系横坐标,y
c
为摄像机坐标系纵坐标,z
c
为摄像机坐标系横坐标;
[0041]
根据公式(5)
‑
(6),可得
[0042][0043]
令y
c
=h,得:
[0044][0045][0046]
上述方案中,所述信息共享模块包括板载stm32f407开发板、花生壳服务器、阿里云服务器;所述板载stm32f407开发板、花生壳服务器、阿里云服务器均通过无线网络连接,
将无人船采集的多样信息通过stm32f407开发板简单处理后,由云服务器进行云端数据融合,并通过无线网络将得到的数据传输至航道其他船舶,完成信息交互任务。
[0047]
上述方案中,所述阿里云服务器用来传输雷达图像和雷达目标跟踪数据;所述花生壳服务器进行视频图像传输。
[0048]
本发明的有益效果在于:
[0049]
1.本发明无人船的信息共享系统能够自动采集前方航行水域信息,包括位置信息、图像信息、障碍物距离信息等,通过云服务器进行数据融合后,将监测信息共享给航道上其他船舶,最大限度消除船舶航行盲区,为船舶安全航行创造条件,特别适用于无霾天气或能见度较低情况下的助航服务。
[0050]
2.本发明中的小目标识别技术可实现对小目标的运动轨迹估计,实现对目标的高精度实时跟踪,并且采用深度学习法对快艇、渔船、航标、碍航物等小目标进行识别与分类,经过云服务器的融合准则,对雷达与摄像头探测的小目标跟踪信息进行自动化关联、相关、估计和融合,从而可以获取相对更加完整、准确的大型船舶领域实时动态信息,优于以往基于大型船舶自身雷达的探测,为船舶避碰提供了新的解决方式。
[0051]
3.本发明的视频目标识别采用基于深度学习框架的darknet网络模型,结合yolov3算法,改进了传统深度学习中的基础分类网络结构和目标的二分类预测方法,实现船舶的跟踪和船舶类型识别。以darknet网络为基础,结合yolov3算法构建实时船舶跟踪识别算法,达到速度和精度的均衡化,保障在低能见度情况下,无人船探测的可靠性。
[0052]
4.本发明为设计者提供海上实时调控平台,基于不同的水域/天气情况,助航人员可对无人船配件进行调整,通过云服务器的融合原则,采用多数据融合技术,对无人船采集数据进行纠错,提升准确性。保证无人船系统在复杂海域情况下,仍能提供精准助航服务,真正意义上实现了在复杂水域的助航服务。
[0053]
5.本发明系统采用无人船进行探测,其整体风险评价方法较为全面,对传统基于大型船舶自身的探测方法,具有感知全面、反应快速的优点。
附图说明
[0054]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0055]
图1是本发明基于无人船的信息共享系统的简化结构框图;
[0056]
图2是本发明小目标识别模块视频目标识别过程图;
[0057]
图3是本发明基于无人船的信息共享系统的信息共享网络图。
具体实施方式
[0058]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0059]
如图1所示,为本发明实施例提供的一种基于无人船的信息共享系统,包括安装于无人船上的精准定位模块、小目标识别模块、信息共享模块。精准定位模块采用基于差分定位的gps定位方法,提供准确的无人船位置信息。小目标识别模块用于采集无人船前端的障碍物相对距离信息、图像信息,并根据采集的障碍物相对距离信息并结合精准定位模块获得的当前无人船位置信息,精准识别目标障碍物的位置信息,并对获取的图像信息进行视
频目标的信息提取,包括视频目标识别、像素坐标与摄像机坐标转换。信息共享模块将无人船采集到的无人船位置信息、障碍物位置信息、视频目标信息通过云服务器进行数据融合,然后将融合后的信息共享给航道上其他船舶,最大限度消除船舶航行盲区,为船舶安全航行创造条件。
[0060]
精准定位模块包括电罗经装置、gps系统和差分gps系统,电罗经装置、gps系统和差分gps系统均通过无线网络与信息共享模块连接。电罗经装置提供的参数,用于保证无人船航行时不发生航向偏移,确定基本航行方向稳定、正确。对于无人船精准定位采用的是基于差分定位的gps定位方法,基于差分定位的gps定位方法是将gps系统、差分gps系统得到的位置参数通过实时推算进行位置修正,得到无人船初次位置,初次位置得到后,将岸上基准站定时发送的改正数和无人船初次位置进行联合计算,来修正测试结果,从而获得精度较高的无人船定位信息。基于差分定位的gps定位方法具体方法如下:
[0061]
岸上基准站将载波相位改正数发送给移动站(无人船),移动站(无人船)利用改正数来修正自己载波相位观测值,进而求解移动站(无人船)的坐标。其观测模型与步骤如下:
[0062]
1)岸上基准站和移动站(无人船)位置采用载波相位定位法,进行观测。
[0063]
岸上基准站伪距方程为
[0064][0065]
移动站(无人船)伪距方程为
[0066][0067]
其中,λ为载波波长。
[0068]
分别是岸上基准站和移动站(无人船)对第j颗卫星伪距观测值。
[0069]
分别是岸上基准站和移动站(无人船)接收时,第j号卫星载波整周模糊度。
[0070]
分别是岸上基准站和移动站(无人船)第j颗卫星载波相位观测量。
[0071]
是岸上基准站到卫星的真实距离,为已知数据。
[0072]
是和间的差值,称为载波相位改正数。
[0073]
2)移动站(无人船)通过载波相位改正数进行差分定位,修正方程为:
[0074][0075]
其中,为移动站(无人船)到卫星的真实距离,为定位作业中待求值;dρ是移动站和参考站钟差引起的残差。
[0076]
3)通过式(1)
‑
(3),可得
[0077][0078]
根据式(4),通过对载波相位模糊度的解算,可以求得移动站(无人船)位置坐标,
即
[0079]
移动站(无人船)位置坐标得到后,将得到的联合进行联合计算,可设定多层级神经网络计算,最后得到较为精准的位置坐标。
[0080]
小目标识别模块包括安装在无人船上的雷达、摄像机、超声测距装置。雷达和摄像机用于主动探测周边环境,在视距不佳情况下对小目标障碍物进行探测。超声测距装置用于测定障碍物与无人船的距离。雷达、摄像机、超声测距装置均通过无线网络与云服务器连接。摄像机采集视频信息后,经由信息共享模块进行图像融合分析,进一步判断障碍物的种类及危险性。
[0081]
小目标识别模块通过对摄像机获取的视频图像、当前的gps坐标位置和罗经信息进行分析,提取视频目标的信息,主要包括视频目标识别、像素坐标与摄像机坐标转换等功能。
[0082]
小目标识别模块进行视频目标识别,是采用基于深度学习框架的darknet网络模型,结合yolov3算法,实现船舶的类型识别。如图2所示,具体包括以下步骤:
[0083]
1)图像输入:通过设计捕获区域,在目标质心进入区域后进行捕获,并给予捕获目标编号;
[0084]
2)特征提取:提取捕获目标特征,包括周长、面积、灰度值等,根据目标特性进行微调;
[0085]
3)模型学习:将输入图像数据作为学习样本,进行模板匹配模型再学习;
[0086]
4)匹配定位:根据标准模板,将捕获图像目标区域经旋转平移转到标准位置;
[0087]
5)分类识别:将捕获的障碍物目标由匹配后,进行分类,并标注不同类别;
[0088]
6)输出结果:完成障碍物种类判别,输出结果。
[0089]
上述视频目标识别方法改进了传统深度学习中的基础分类网络结构和目标的二分类预测方法,以darknet网络为基础,结合yolov3算法构建实时识别算法,达到速度和精度的均衡化。
[0090]
小目标识别模块进行像素坐标与摄像机坐标转换,是指完成视频目标识别中障碍物坐标的坐标系转换,具体方法为:
[0091]
采用较为理想的针孔成像模型,假设来自三维空间的光线均由一个小孔光学逆映射至一个二维平面,且摄像机水平安装,俯仰角、侧倾角和横摆角均为0
°
,摄像机离水面的安装高度为h,为此需要对摄像机成像模型的坐标系进行空间变换,像素坐标转换成图像坐标系公式为:
[0092][0093]
式中,u为像素坐标系横坐标,v为像素坐标系纵坐标,u0为像素坐标系横坐标原点,v0为像素坐标系纵坐标原点,x为图像坐标系横坐标,y为图像坐标系纵坐标,dx为x轴上单个像素点的物理尺寸,dy为y轴上单个像素点的物理尺寸。
[0094]
图像坐标系转换成可见光摄像头坐标系公式为:
[0095][0096]
式中,x为图像坐标系横坐标,y为图像坐标系纵坐标,f为摄像机焦距,x
c
为摄像机坐标系横坐标,y
c
为摄像机坐标系纵坐标,z
c
为摄像机坐标系横坐标。
[0097]
根据公式(5)
‑
(6),可得
[0098][0099]
令y
c
=h,得:
[0100][0101][0102]
经上述公式推演,完成视频目标识别中障碍物坐标的坐标系转换,为小目标识别模块的信息利用,提供更广阔前景。
[0103]
如图3所示,信息共享模块包括板载stm32f407开发板、花生壳服务器、阿里云服务器。板载stm32f407开发板、花生壳服务器、阿里云服务器均通过无线网络连接,将无人船采集的多样信息通过stm32f407开发板简单处理后,由云服务器进行云端数据融合,并通过无线网络将得到的数据传输至航道其他船舶,完成信息交互任务。
[0104]
本发明具体实施过程为:精准定位模块、小目标识别模块通过各项传感器采集环境信息,将雷达数据、gps数据、视频数据、罗经数据经由内置在信息共享模块的无线网络,传输到阿里云服务器和花生壳服务器。其中阿里云服务器用来传输雷达图像、雷达目标跟踪数据;花生壳服务器进行视频图像传输,能够在信息共享时起到双通道作用,保证即使出现服务器损坏情况情况,也能提供较为精准的信息共享服务。信息到达阿里云服务器、花生壳服务器后,通过云端数据融合,将得到数据共享给航道其余船只,完成信息交互任务。在信息交互过程中,高清视频、图像以及船舶实时采集数据的传输对通信带宽的要求很高,因而4g/5g技术在船岸信息交互上的应用,对监控整体感知能力有质的提升。
[0105]
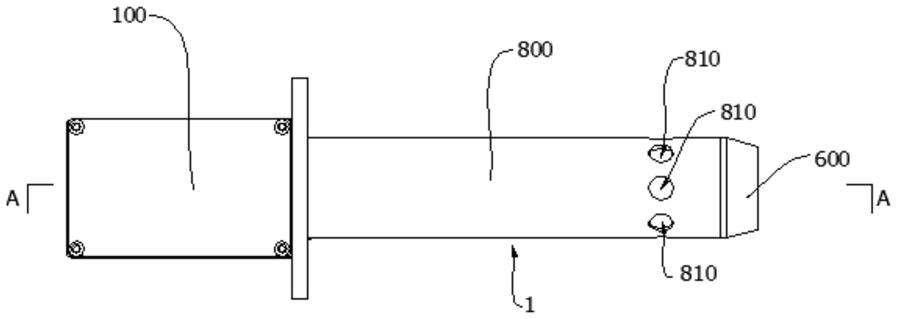
进一步优化,本实施例中,小目标识别模块中超声波测距功能是船舶感知系统中用来感知障碍物距离的,对于该模块的选择,为了可靠保证本船与其他障碍物距离,应设置至少两个探头,通过rs485接口与无人船的自航模控制器连接,并能返回多种数据值以供参考和使用。所以选择了ks106防水探头超声波模块。超声波模块测距是通过scl线查询来完成的。在实际测距前有约40us的探测指令延迟,发送探测指令阶段,scl线一直置于较低位置,当置于高位的时候,控制驱动器便能通过rs485总线接收测距模块中距离或者时间数据,进一步确定障碍物位置。该模块可以直接输出距离,单位为mm,也可以输出声波传输时间,可用于后期数据综合考察或ais数据交流。
[0106]
进一步优化,本实施例中,电罗经装置采用bw
‑
h200罗经,用于采集无人船的方位信息,其与无人船的自航模控制器采用485通讯。
[0107]
进一步优化,本实施例中,摄像机采用可见光摄像头。
[0108]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。