1.本发明属于核能科学与工程技术领域,具体涉及一种压水堆核电厂不调硼负荷跟踪运行与控制方法。
背景技术:
2.在能源问题和环境问题日益突出的今天,核电作为一种可大规模应用的清洁能源,在保障能源安全、优化能源结构、减少碳排放和建设美丽中国中发挥着越来越重要的作用,在我国能源供应中具有重要的战略地位。为了满足电网对核电站实现负荷跟踪运行的要求,对于现役核电站,在不改变其一二回路总体布局的前提下,研究通过重新设计堆芯燃料布置和改进堆芯控制系统,以获得良好的负荷跟踪运行能力,成为解决该问题的重要手段。
3.第二代压水堆核电站cpr1000是我国在运核电站的主流堆型,采用g模式运行,负荷跟踪能力较差,且负荷跟踪过程需要操作员手动调整硼浓度,自动化程度低、经济性差,会产生大量放射性废液,尤其是在寿期末,一回路冷却剂硼浓度已经很低,很难再通过改变硼浓度来调节反应性,因此,采用g模式的cpr1000核电站只在前80%循环寿期内有效,而在循环寿期的末20%将丧失负荷跟踪能力。
4.机械补偿(mechanical shim,mshim)运行控制策略是一种先进的压水堆堆芯运行与控制策略,其特点是仅通过控制棒组(m棒组和ao棒组)的自动动作就能很好地控制反应堆堆芯功率和轴向功率分布,而无需操作员频繁调硼,自动化水平高,大幅减少了负荷跟踪运行过程中产生的放射性废液,能在至少95%的堆芯寿期内实现不调硼负荷跟踪。
5.参考先进的mshim控制策略,将cpr1000核电厂传统的g运行模式改进为先进的不调硼模式,以实现不调硼负荷跟踪运行,对提高我国第二代压水堆核电站运行的自动化程度、经济性和运行安全性具有重要的科研意义和应用价值。
技术实现要素:
6.为解决上述背景技术中提出的问题,本发明的目的在于提供一种压水堆核电厂不调硼负荷跟踪运行与控制方法,具有自动化程度高、经济性好和安全性高的特点。
7.为实现上述目的,本发明提供如下技术方案:
8.一种压水堆核电厂不调硼负荷跟踪运行与控制方法,包括以下步骤:
9.s1、对于堆芯功率不大于70%fp,汽轮机瞬间甩不大于50%fp的小范围功率变化过程,采用控制棒组闭环精调的方式进行控制,并与一回路、二回路控制系统协调控制,实现安全运行;
10.s2、对于堆芯功率在70%fp以上,汽轮机瞬间甩50%fp以上的大范围甩负荷工况,则采用控制棒组开环粗调 控制棒组闭环精调的方式进行控制,并与一回路、二回路控制系统协调控制,实现大范围甩负荷或停机不停堆运行,实现安全运行。
11.所述的控制棒组开环粗调方式是:堆芯功率在70%fp以上,汽轮机瞬间甩50%fp
以上的负荷,先根据所需降功率的幅度,选定匹配的控制棒组,依靠重力作用落入堆芯,使堆芯功率下降。
12.所述的控制棒组闭环精调的方式,在瞬态工况采用nsga
‑
ii算法进行参数优化,对控制棒组中的m棒组控制系统的反应堆功率p与冷却剂平均温度t
avg
两个目标进行参数优化,具体为:
13.步骤(1)、采用itae评价标准建立如下目标函数:
[0014][0015]
式中:
[0016][0017]
式中:τ—仿真时间/s;p、p
ref
—归一化实际功率与参考功率;t、t
avg
—冷却剂实际温度与参考温度/℃;
[0018]
步骤(2)、根据目标函数,采用nsga
‑
ii多目标优化算法,对控制棒组中m棒控制系统函数中的:超前滞后单元的超前时间常数、偏差微分单元的时间常数和温度死区上、下限进行多目标优化,优化控制参数向量x如下:
[0019]
x=[τ2,τ3,τ5,l
d
,l
u
]
[0020]
式中:τ2—超前滞后单元的超前时间常数;τ3—超前滞后单元的滞后时间常数;τ5—偏差微分单元的时间常数;l
d
—温度死区下限;l
u
—温度死区上限,优化变量向量x的上下限分别为:
[0021][0022]
步骤(3)、根据步骤(2)所获得的优化参数,更新控制棒组中的m棒控制系统中相应的参数。
[0023]
所述的与一回路控制系统协调控制,具体为:
[0024]
由于控制棒组包含m棒组、ao棒组和s停堆棒组三组控制棒组,采用m棒和ao棒分别控制反应堆功率和轴向功率偏移,m棒组控制以核功率、汽轮机功率和冷却剂平均温度作为输入信号,是三通道控制系统,包含的保护信号有:功率量程内高中子通量、中子通量变化率、超温δt、超功率δt、高稳压器水位、高稳压器压力、稳压器压力过低、蒸汽发生器低-低水位和蒸汽发生器高-高水位;其中稳压器包含了稳压器压力控制与水位控制,蒸汽发生器的水位通过给水控制系统来控制;超温δt保护信号防止燃料包壳烧毁,超功率δt保护信号防止燃料芯块熔化,要求超温δt保护和超功率δt保护信号与其整定值之差均要大于0,其整定值可由式(1)和式(2)分别算得:
[0025]
[0026][0027]
式中:k1~k8—额定标准工况下的裕度系数;δt0—额定功率标准工况下的堆芯进出口温差/℃;t0—冷却剂的平均温度/℃;p0—稳压器参考压力/mpa;n0—主泵转速/转/分;t
av
—实时的冷却剂进出口平均温度/℃;p—稳压器实际压力/mpa;n—主泵转速/转/分;f1(δi)和f2(δi)—超温δt和超功率δt保护关于δi的分段函数,τ1~τ5—时间常数;s表示拉普拉斯变换中的复频率。
[0028]
所述的与二回路控制系统协调控制,具体为:
[0029]
二回路控制系统包括蒸汽排放控制系统,通过蒸汽排放系统,当汽轮机经历以下瞬态,即大于10%fp阶跃负荷,或大于5%fp/min线性降负荷,排出多余的蒸汽确保整个核电站系统的安全,当汽轮机经历大幅度的甩负荷瞬态时,蒸汽排放控制系统及时打开;蒸汽排放控制系统包含比例开启蒸汽排放阀门和快速开启蒸汽排放阀门,当由汽轮机负荷水平产生的参考温度与堆芯冷却剂实际平均温度的温差在某一最低限值以内时,所有阀门关闭,当温度偏差超过该限值时,蒸汽排放阀门按比例开启,当温度偏差max1≤δt<max2时,第一组快速开启阀门开启,当温度偏差max2≤δt<max3时,第二组快速开启阀门开启,以此类推。
[0030]
与现有技术相比,本发明的有益效果是:
[0031]
本发明通过调硼来补偿燃耗的反应性慢变化过程,通过控制棒进行反应性的快速调节,从而大幅减少运行过程中的调硼操作,大量减少放射性废液,提高我国第二代压水堆核电站运行的自动化程度、经济性和运行安全性;通过nsga
‑
ii算法优化三通道控制系统参数,改善堆芯控制效果。
附图说明
[0032]
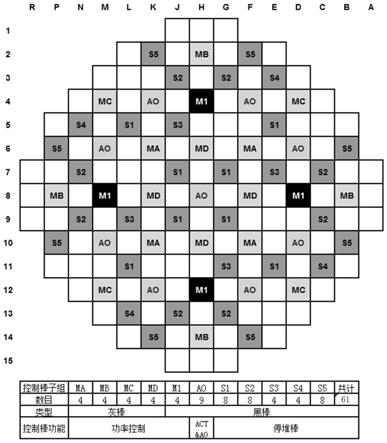
图1为本发明堆芯控制棒组的布置示意图。
[0033]
图2为本发明m棒叠步程序。
[0034]
图3为本发明控制棒组中包含的m棒组、ao棒组控制系统示意图。
[0035]
图4为本发明ao棒组控制系统框图。
[0036]
图5为本发明m棒组控制系统框图。
[0037]
图6为本发明cpr1000保护系统simulink框图。
[0038]
图7为本发明超温δt和超功率δt保护系统示意图。
[0039]
图8为本发明蒸汽排放控制系统原理框图。
具体实施方式
[0040]
下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
一种压水堆核电厂不调硼负荷跟踪运行与控制方法,包括以下步骤:
[0042]
s1、对于堆芯功率不大于70%fp,汽轮机瞬间甩不大于50%fp的小范围功率变化
过程,采用控制棒组闭环精调的方式进行控制,并与一回路、二回路控制系统协调控制,实现安全运行;
[0043]
s2、而对于堆芯功率在70%fp以上,汽轮机瞬间甩50%fp以上的大范围甩负荷工况,则采用控制棒组开环粗调 控制棒组闭环精调的方式进行控制,并与一回路、二回路控制系统协调控制,实现大范围甩负荷或停机不停堆运行,实现安全运行。
[0044]
所述的控制棒组开环粗调方式是:堆芯功率在70%fp以上,汽轮机瞬间甩50%fp以上的负荷,先根据所需降功率的幅度,选定匹配的控制棒组,依靠重力作用落入堆芯,使堆芯功率下降。
[0045]
所述的控制棒组闭环精调的方式,在瞬态工况采用nsga
‑
ii算法进行参数优化,对控制棒组中的m棒组控制系统的反应堆功率p与冷却剂平均温度t
avg
两个目标进行参数优化,具体为:
[0046]
(1)采用itae评价标准建立如下目标函数:
[0047][0048]
式中:
[0049][0050]
式中:τ—仿真时间/s;p、p
ref
—归一化实际功率与参考功率;t、t
avg
—冷却剂实际温度与参考温度/℃。
[0051]
(2)根据目标函数,采用nsga
‑
ii多目标优化算法,对图5所示控制棒组中的m棒控制系统函数中的:超前滞后单元的超前时间常数、偏差微分单元的时间常数和温度死区上、下限进行多目标优化,优化控制参数即向量x如下:
[0052]
x=[τ2,τ3,τ5,l
d
,l
u
]
[0053]
式中:τ2—超前滞后单元的超前时间常数;τ3—超前滞后单元的滞后时间常数;τ5—偏差微分单元的时间常数;l
d
—温度死区下限;l
u
—温度死区上限,优化变量向量x的上下限分别为:
[0054][0055]
(3)根据(2)所获得的优化参数,更新控制棒组中的m棒控制系统中相应的参数。
[0056]
所述的一回路的协调控制具体为:
[0057]
控制棒组包含m棒组20组、ao棒组9组和s停堆棒组32组,三种类型控制棒组共计61组,采用对称形式布置,其详细分组和布置形式如图1所示。其中,m棒组分为ma、mb、mc、md和m1棒组,前四种棒组为灰棒,主要负责功率控制,而m1棒组为黑棒,主要负责停堆备用。ao棒组以及5组s棒组均为黑棒组,在紧急情况下可全部插入堆芯实现停堆备用。参照图2,是m棒组的叠步方式,以获得更加线性的反应性变化曲线。ma棒、mb、mc、md和m1棒组均为225步,降功率时按顺序插入堆芯。其中ma棒顶部约1/3(142步
‑
225步)与mb棒底部约1/3重叠,而mb棒
顶部约1/3与mc棒底部约1/3重叠,以此类推,反之亦然。这样保证了在升降功率的过程中,m控制棒组能为堆芯引入较为线性的反应性变化。m棒和ao棒采用双闭环控制,如图3所示,m棒和ao棒分别控制反应堆功率和轴向功率偏移。其中,ao闭环控制系统以轴向功率偏差δi、轴向功率偏差目标带δi和参考功率为输入信号,以图4所示的控制律控制ao棒棒速,从而实现对反应堆堆芯ao的控制。其中轴向功率偏移ao为:ao与轴向功率偏差δi之间的关系为:δi=p
t
‑
p
b
=ao
×
(p
t
p
b
)(%fp),其中:p
t
为堆芯上部功率/%fp,p
b
堆芯下部功率/%fp。m棒控制系统以反应堆功率、汽轮机功率和冷却剂平均温度为输入信号,按照图5所示的控制律控制m棒棒速,实现对反应堆功率的控制。在实际过程中,功率(m棒)和功率分布控制(ao棒)可能会相互影响,可能同时出现ao棒和m棒动作的信号,当二者控制信号出现冲突时,m棒控制系统优先。ao控制系统除了要接收目标ao和实际ao值信号以外,还要接收从冷却剂平均温度控制系统来的闭锁信号。当ao棒与m棒同时收到动作信号时,如果二者移动的方向相同,则优先让ao棒移动,此时,ao棒将同时控制堆芯功率和功率分布;当ao棒和m棒移动的方向相反时,则依然采用m棒优先的闭锁逻辑。闭环控制系统由于存在反馈,因而可实现对系统外部扰动和内部参数的变化均不敏感,可利用不太精确且成本较低的元件构建精确的控制系统,实现对象参数的精确控制,闭环控制更适用于缓慢过程的精确调节,对于从额定负荷运行工况下甩负荷到厂用电瞬态、停机不停堆等大范围甩负荷瞬变工况,闭环控制特性将导致过长的调节时间(约3000秒),m棒为平均温度控制棒组,由参考温度和堆芯平均温度的温差信号驱动控制棒,当系统甩去大部分负荷后,随着控制棒的快速下插,堆芯冷却剂的平均温度与参考温度的差值迅速减小,m棒棒速也因此变慢,且温度的变化本身也是较慢的过程,采用的m棒的控制棒价值是cpr1000的g棒的1/2左右,同样的插棒速度引入的负反应性只有g棒控制的一半左右,会使功率下降过程变慢,因此,如仅通过温度反馈的闭环控制策略,堆芯功率由m棒组最终调节到30%fp附近的过程较慢,灵活性不足,由于控制策略在小范围负荷变动或者缓慢功率变化的时候,能提供精确且足够快速的控制,但是对于大范围甩负荷工况,控制策略仅有闭环控制的特点会使降功率过程变慢,因此,有必要改进原有的不调硼控制策略,对小范围的功率变化或缓慢的功率变化过程仍采用m棒的闭环控制方案,而对于大范围的甩负荷工况则采用开环粗调 m棒组闭环精调的方式进行控制,以快速而精确地把功率降到参考值,当堆芯功率在70%fp以上时,汽轮机瞬间甩50%fp以上的负荷将触发快速降功率系统,由控制程序选定的控制棒组依靠重力作用落入堆芯,使堆芯功率快速下降,而核电厂一、二回路功率失配信号也将触发不调硼控制系统和蒸汽排放系统动作,在两者的协调作用下使堆芯功率与二回路负荷相匹配,最终实现大范围甩负荷或停机不停堆运行,为了避免弹棒或意外落棒事故,cpr1000原有的停堆保护系统设置了中子通量变化率高保护信号,在快速降功率模式下,中子通量变化率可达
‑
30%/2s,将触发中子通量变化率高紧急停堆,因而在瞬时大范围甩负荷触发快速降功率系统的过程中,需屏蔽cpr1000原有的中子通量变化率高保护信号,以避免意外停堆。
[0058]
如图5所示,m棒组控制以核功率、汽轮机功率和冷却剂平均温度作为输入信号,是三通道控制系统,包括:功率失配通道、冷却剂平均温度定值通道和冷却剂平均温度测量通道。功率失配通道是一路超前控制通道,此通道的输入信号为核功率与汽轮机功率失配信号,这个控制信号使得控制系统能够在功率失配时迅速反应,为控制系统提供超前调节作
用,从而减小瞬态峰值;平均温度定值通道,这一路信号来自二回路的汽轮机,汽轮机负荷经平均温度定值函数产生冷却剂平均温度的设定值,经滤波后为m棒控制系统提供平均温度的设定值;平均温度测量通道测量出一回路的冷却剂平均温度,经滤波器和超前滞后单元,为m棒控制系统提供冷却剂平均温度的测量信号。三通道信号经求和或求差后,被送入棒速程序单元驱动m棒动作,实现对堆芯功率的控制;如图4所示,ao棒控制系统原理,以反应堆功率和轴向功率偏差作为输入信号,实际功率信号经过函数发生器产生轴向功率偏差参考值,改参考值与实际值比较,偏差信号进入ao棒速程序单元,驱动ao棒执行相应动作,以实现对ao的控制。m棒组控制包含的保护信号有:见图6,功率量程内高/低中子通量(中子通量n>109%或n<25%)、高中子通量变化率(|dn/d(2s)|>5%)、超温δt(<0℃)、超功率δt(<0℃)、高稳压器水位(l
p
>86%)、高稳压器压力(p>16.55mpa)、稳压器压力过低(p<13.1mpa)、蒸汽发生器低-低水位(l
utsg
<15%)和蒸汽发生器高-高水位(l
utsg
>88.8%)。以上任意一种或多种信号超过了其保护限值,将触发保护系统动作,将全部控制棒以自由落体的方式落入堆芯,实现停堆保护;其中稳压器包含了稳压器压力控制与水位控制,蒸汽发生器的水位通过给水控制来系统来控制;超温δt和超功率δt是通过可测量的堆芯冷却剂进出口温度、稳压器压力等信号实现对无法测量的堆芯燃料元件芯块、包壳温度预测,防止发生熔毁,因而可反映出堆芯在瞬态工况下的安全裕度,超温δt保护信号防止燃料包壳烧毁,超功率δt保护信号防止燃料芯块熔化,要求超温δt保护和超功率δt保护信号与其整定值之差均要大于0,其整定值可由式(1)和式(2)分别算得,如图7所示:
[0059][0060][0061]
式中:k1~k8—额定标准工况下的裕度系数;δt0—额定功率标准工况下的堆芯进出口温差/℃;t0—冷却剂的平均温度/℃;p0—稳压器参考压力/mpa;n0—主泵转速/转/分;t
av
—实时的冷却剂进出口平均温度/℃;p—稳压器实际压力/mpa;n—主泵转速/转/分;f1(δi)和f2(δi)—超温δt和超功率δt保护关于δi的分段函数,τ1~τ5—时间常数;s表示拉普拉斯变换中的复频率。
[0062]
所述的二回路协调控制具体为:
[0063]
二回路控制系统包括汽轮机转速控制、再热器出口温度控制、凝汽器壳侧蒸汽压力控制、除氧器水位控制、蒸汽排放控制系统;其中蒸汽排放控制系统是开环控制;轮机转速控制、再热器出口温度控制、凝汽器壳侧蒸汽压力控制和除氧器水位控制均为pi控制系统,通过pi控制系统,汽轮机转速控制通过改变高压缸进汽阀的开度来调节进汽流量,从而控制汽轮机转速,再热器出口温度控制通过改变管侧加热蒸汽流量的大小来获得所需的出口蒸汽温度,凝汽器壳侧蒸汽压力控制通过改变循环冷却水流量来改变壳侧蒸汽的凝结速率,最终达到控制壳侧蒸汽压力的目的,除氧器水位控制通过改变凝结水抽取泵的泵速来改变抽往除氧器给水的流量,最终使除氧器水位在参考水位附近,通过蒸汽排放系统,当汽轮机经历以下瞬态,即大于10%fp阶跃负荷,或大于5%fp/min线性降负荷,排出多余的蒸汽确保整个核电站系统的安全,当汽轮机经历大幅度的甩负荷瞬态时,蒸汽排放控制系统及时打开,为一回路系统排出多余热量,避免一回路冷却剂因为温度过高而过度膨胀引起
稳压器压力超过安全限值而触发保护系统动作引起停堆;如图8所示,蒸汽排放控制系统包含比例开启蒸汽排放阀门和快速开启蒸汽排放阀门,当由汽轮机负荷水平产生的参考温度与堆芯冷却剂实际平均温度的温差在某一最低限值以内时,所有阀门关闭,当温度偏差超过该限值时,蒸汽排放阀门按比例开启,当温度偏差max1≤δt<max2时,第一组快速开启阀门开启,当温度偏差max2≤δt<max3时,第二组快速开启阀门开启,以此类推。
[0064]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。