技术特征:
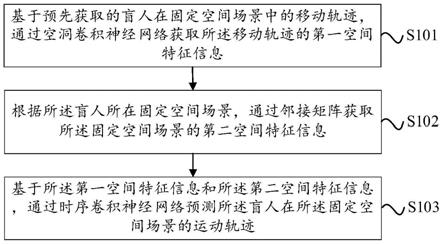
1.一种盲人行走轨迹预测方法,其特征在于,包括:基于预先获取的盲人在固定空间场景中的移动轨迹,通过空洞卷积神经网络获取所述移动轨迹的第一空间特征信息;根据所述盲人所在固定空间场景,通过邻接矩阵获取所述固定空间场景的第二空间特征信息;基于所述第一空间特征信息和所述第二空间特征信息,通过时序卷积神经网络预测所述盲人在所述固定空间场景的运动轨迹。2.根据权利要求1所述的方法,其特征在于,所述通过空洞卷积神经网络获取所述移动轨迹的第一空间特征信息的方法包括:获取所述移动轨迹中多个点的横坐标和纵坐标,以及所述移动轨迹中多个点的横坐标和纵坐标的平均值和标准差;获取所述移动轨迹中第一点和非第一点的空间距离特征;基于所述移动轨迹中多个点的横坐标和纵坐标、所述移动轨迹中多个点的横坐标和纵坐标的平均值和标准差以及所述移动轨迹中第一点和非第一点的空间距离特征,通过所述空洞卷积神经网络获取所述移动轨迹的第一空间特征信息,其中,所述第一空间特征信息用于指示所述盲人的空间位置信息。3.根据权利要求1所述的方法,其特征在于,所述根据所述盲人所在固定空间场景,通过邻接矩阵获取所述固定空间场景的第二空间特征信息的方法包括:获取所述盲人所在固定空间场景的空间矩阵信息,基于所述空间矩阵信息,通过所述邻接矩阵获取所述固定空间场景的归一化空间特征信息;基于所述固定空间场景的归一化空间特征信息,通过预先训练好的图卷积神经网络获取所述固定空间场景的第二空间特征信息,其中,所述第二空间特征信息包括所述固定空间场景中可通行区域的空间特征信息和障碍物区域的空间特征信息。4.根据权利要求1所述的方法,其特征在于,所述通过时序卷积神经网络预测所述盲人在所述固定空间场景的运动轨迹之前,所述方法还包括:将所述第一空间特征信息输入预先训练好的维度转换模型,将所述第一空间特征信息转换为一维空间矩阵,获取所述第一空间特征信息转换为一维空间矩阵的残差,其中,所述维度转换模型用于将输入的空间矩阵转换为预设维度的空间矩阵;基于所述移动轨迹中第一点和非第一点的空间距离特征,以及多个所述残差,获取多个所述残差的加权和,以降低所述时序卷积神经网络预测运动轨迹的误差。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:将所述移动轨迹中每个点进行网格标签化,确定所述移动轨迹中每个点的网格位置信息,其中,所述网格标签化是将所述移动轨迹中每个点的位置信息映射到预设网格中;基于所述移动轨迹中每个点的网格位置信息,判断所述时序卷积神经网络所预测的运动轨迹是否与所述移动轨迹中每个点的网格位置信息相匹配;若匹配,则判定所预测的运动轨迹准确。6.根据权利要求2所述的方法,其特征在于,所述通过所述空洞卷积神经网络获取所述移动轨迹的第一空间特征信息的方法包括按如下公式所示的方法获取所述移动轨迹的第
一空间特征信息:其中,o表示第一空间特征信息,σ表示relu激活函数,表示d
k
的标准差,d
k
表示移动轨迹中第一个节点和第k个节点的距离特征,d
i
表示移动轨迹中第一个节点和第i个节点的距离特征,表示d
k
的平均值,o
conv
表示conv激活函数,cat()表示构造多维数组函数。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取所述移动轨迹中多个点的横坐标和纵坐标,以及所述移动轨迹中多个点的横坐标和纵坐标的平均值和标准差;基于所述多个点的横坐标和纵坐标、所述横坐标和纵坐标的平均值和标准差,通过预设的激活函数,获取所述移动轨迹中多个点的第三空间特征信息,以使所述空洞卷积神经网络根据所述第三空间特征信息获取所述移动轨迹的第一空间特征信息;其中,所述第三空间特征信息用于指示所述移动轨迹中多个点经过压缩后的空间位置。8.根据权利要求1所述的方法,其特征在于,所述获取所述移动轨迹中多个点的第三空间特征信息的方法包括:按照如下公式所示的方法获取所述移动轨迹中多个点的第三空间特征信息:其中,p
i
表示第三空间特征信息,σ表示relu激活函数,cat()表示构造多维数组函数,表示x
k
的标准差,x
k
表示移动轨迹中第k个节点的横坐标,x
i
表示移动轨迹中第i个节点的横坐标,表示x
k
的平均值,表示y
k
的平均值,y
k
表示移动轨迹中第k个节点的纵坐标,y
i
表示移动轨迹中第i个节点的纵坐标,表示y
k
的平均值。9.一种电子设备,其特征在于,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为调用所述存储器存储的指令,以执行权利要求1至8中任意一项所述的方法。10.一种计算机可读存储介质,其上存储有计算机程序指令,其特征在于,所述计算机程序指令被处理器执行时实现权利要求1至8中任意一项所述的方法。
技术总结
本发明提供一种盲人行走轨迹预测方法、电子设备及存储介质,包括基于预先获取的盲人在固定空间场景中的移动轨迹,通过空洞卷积神经网络获取所述移动轨迹的第一空间特征信息;根据所述盲人所在固定空间场景,通过邻接矩阵获取所述固定空间场景的第二空间特征信息;基于所述第一空间特征信息和所述第二空间特征信息,通过时序卷积神经网络预测所述盲人在所述固定空间场景的运动轨迹。本发明的方法能够准确地预测盲人的运动轨迹。确地预测盲人的运动轨迹。确地预测盲人的运动轨迹。
技术研发人员:林青 吕志强 董学士 李平 李宗磊 唐晓晨
受保护的技术使用者:青岛大学
技术研发日:2021.09.18
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。