1.本发明属于孤石波形线成像技术领域,具体涉及一种盾构隧道孤石波形线成像方法。
背景技术:
2.珠三角地区的中南部,沿线地层起伏大,不同地层土体物理力学性质差异较大,盾构施工条件复杂。地层中还广泛分布着残积土层和全风化花岗岩土层,地层中常常有着大量强度高、硬度大的孤石发育,这对盾构隧道施工影响极大。诸多工程案例表明,球径小、数量多的孤石群易堵塞刀盘刀具,从而导致盾构道具磨损严重以及偏磨等,使得盾构施工被迫频繁换刀。球径中等的孤石会随着盾构机的掘进而发生随机移动和转动,这不仅对地层产生强烈扰动,还对刀盘施加方向多变的反力,进而导致盾构机姿态难以控制。球径大、强度高的孤石将直接引起盾构刀盘、刀具的变形和损坏,甚至能够对盾构机主轴造成伤害。分布在盾构机掘进断面内的孤石严重影响盾构隧道施工效率,给工程带来不可预期的施工风险,造成施工工期不可控,施工质量和安全均难以保证。因此,必须在盾构法施工前探查并摸清沿线孤石的分布情况,准确预报出孤石的大小和位置,保证施工的安全与成功。
技术实现要素:
3.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种盾构隧道孤石波形线成像方法,针对盾构隧道地质雷达超前探测的结果解译和分析,从地质雷达探测结果中解译并提取出孤石的响应特征曲线,并通过成像方法计算出孤石球径大小和位置的重要信息,为盾构施工中孤石的处治提供依据,便于推广使用。
4.为解决上述技术问题,本发明采用的技术方案是:一种盾构隧道孤石波形线成像方法,其特征在于,该方法包括以下步骤:
5.步骤一、描述地质雷达的行程位置坐标和孤石的轮廓坐标:利用地质雷达在地面探测数据,其中,地质雷达的中心点与孤石的中心点所在平面垂直于水平面,地质雷达沿从孤石一侧先靠近孤石再远离孤石的行程路径移动;
6.以地质雷达的起点为坐标原点、地质雷达前进方向为x轴正方向、垂直向下为y轴正方向建立二维直角坐标系,根据公式描述地质雷达的行程位置坐标(x
d
,y
d
),其中,v为地质雷达前进速度,t为地质雷达前进时间;
7.根据公式描述孤石的轮廓坐标(x
a
,y
a
),其中,(x0,y0)为孤石中心点坐标,r为孤石有效半径,θ为地质雷达和孤石中心点的连线与水平线之间的夹角;
8.步骤二、根据公式计算孤石的响应
点坐标(x,y);
9.步骤三、根据公式筛选孤石响应有效点(x
i
,y
i
),其中,d为地质雷达到孤石中心点的距离,为电磁波与孤石外轮廓垂直程度,表示垂直;
10.步骤四、离散的孤石响应有效点的曲线拟合:采用双曲线型函数对离散的孤石响应有效点进行拟合,得到孤石的响应曲线;
11.步骤五、对孤石的响应曲线进行成像计算,过程如下:
12.步骤501、根据公式描述地质雷达的孤石球心的距离|do|;
13.步骤502、根据公式(x
‑
x0)2 y
02
=(y r)2,描述孤石轮廓点和孤石响应点的几何关系,带入孤石响应有效点坐标计算出孤石的球径和位置信息,即其中,(x
i
,y
i
)、(x
i 1
,y
i 1
)和(x
i 2
,y
i 2
)分别为地质雷达不同位置下孤石响应有效点坐标;
14.计算得
15.上述的一种盾构隧道孤石波形线成像方法,其特征在于:所述地质雷达的行程位置选取不少于三个。
16.上述的一种盾构隧道孤石波形线成像方法,其特征在于:所述地质雷达的行程位置为十个;十个地质雷达的行程位置计算得到十个孤石的响应点坐标,继而筛选十个孤石响应有效点,多次采用任意三个离散的孤石响应有效点进行曲线拟合,获取孤石的多个初始响应曲线,并对孤石的响应曲线进行成像计算;最后通过计算得出成像结果的平均值定位孤石的球径和位置信息。
17.本发明的有益效果是,针对盾构隧道地质雷达超前探测的结果解译和分析,从地质雷达探测结果中解译筛选孤石响应有效点并采用双曲线型函数对离散的孤石响应有效点进行拟合,得到孤石的响应曲线,并通过成像方法计算出孤石球径大小和位置的重要信息,为盾构施工中孤石的处治提供依据,便于推广使用。
18.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
19.图1为本发明地质雷达基本探测原理示意图。
20.图2为本发明孤石点理论解析示意图。
21.图3为本发明成像计算原理示意图。
22.图4为本发明孤石响应点筛选方法示意图。
23.图5为本发明孤石响应和响应曲线拟合算例示意图。
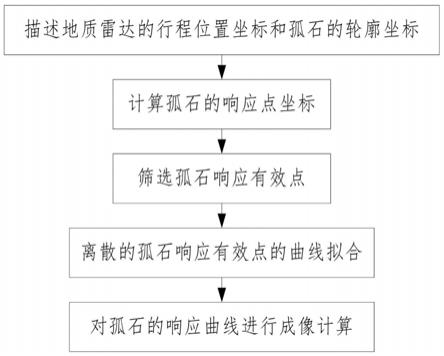
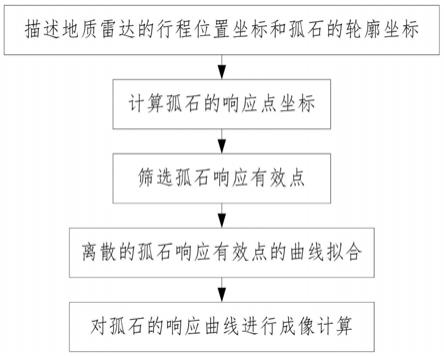
24.图6为本发明的方法流程框图。
具体实施方式
25.如图1至图6所示,本发明的一种盾构隧道孤石波形线成像方法,包括以下步骤:
26.步骤一、描述地质雷达的行程位置坐标和孤石的轮廓坐标:利用地质雷达在地面探测数据,其中,地质雷达的中心点与孤石的中心点所在平面垂直于水平面,地质雷达沿从孤石一侧先靠近孤石再远离孤石的行程路径移动;
27.以地质雷达的起点为坐标原点、地质雷达前进方向为x轴正方向、垂直向下为y轴正方向建立二维直角坐标系,根据公式描述地质雷达的行程位置坐标(x
d
,y
d
),其中,v为地质雷达前进速度,t为地质雷达前进时间;
28.根据公式描述孤石的轮廓坐标(x
a
,y
a
),其中,(x0,y0)为孤石中心点坐标,r为孤石有效半径,θ为地质雷达和孤石中心点的连线与水平线之间的夹角;
29.步骤二、根据公式计算孤石的响应点坐标(x,y);
30.步骤三、根据公式筛选孤石响应有效点(x
i
,y
i
),其中,d为地质雷达到孤石中心点的距离,为电磁波与孤石外轮廓垂直程度,表示垂直;
31.步骤四、离散的孤石响应有效点的曲线拟合:采用双曲线型函数对离散的孤石响应有效点进行拟合,得到孤石的响应曲线;
32.步骤五、对孤石的响应曲线进行成像计算,过程如下:
33.步骤501、根据公式描述地质雷达的孤石球心的距离|do|;
34.步骤502、根据公式(x
‑
x0)2 y
02
=(y r)2,描述孤石轮廓点和孤石响应点的几何关系,带入孤石响应有效点坐标计算出孤石的球径和位置信息,即其中,(x
i
,y
i
)、(x
i 1
,y
i 1
)和(x
i 2
,y
i 2
)分别为地质雷达不同位置下孤石响应有效点坐标;
35.计算得
36.本实施例中,所述地质雷达的行程位置选取不少于三个。
37.本实施例中,优选的,所述地质雷达的行程位置为十个;十个地质雷达的行程位置计算得到十个孤石的响应点坐标,继而筛选十个孤石响应有效点,多次采用任意三个离散的孤石响应有效点进行曲线拟合,获取孤石的多个初始响应曲线,并对孤石的响应曲线进行成像计算;最后通过计算得出成像结果的平均值定位孤石的球径和位置信息,以减小因选点而产生的人为误差。
38.本发明实施时,以孤石半径r=2.0m,埋置深度为20.0m的孤石的地质雷达正演模拟结果为例,进行成像分析。共选取了8个清晰的响应点进行双曲线拟合,拟合曲线如图5所示。然后多次从曲线中连续选取了三个响应点,并进行成像分析,最后计算得出成像结果的平均值。成像分析的计算结果如表1所示。
39.表1孤石响应的成像分析结果
[0040][0041][0042]
修正前的波形响应曲线为经修正后的波形响应曲线为通过成像方法计算出孤石球径大小和位置的重要信息,为盾构施工中孤石的处治提供依据。
[0043]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明
技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。