1.本发明涉及航天器通信领域,具体地,涉及一种火星环绕器载波捕获方法及系统,尤其是涉及到一种航天器在低信噪比,大频偏下的上行载波捕获的方法。
背景技术:
2.火星环绕器与常规近地卫星的通信有着明显不同的特点,由于地火最远距离4亿公里,普通应答机的接收灵敏度远远无法满足要求。深空应答机的灵敏度可达
‑
155dbm,在如此弱的信号强度下,可供提取信号的信噪比极低。而在地火转移过程中,又存在近乎
±
100khz的多普勒频偏,这对载波信号的提取又增加了困难。
3.在公告号为cn106936469b的中国专利文献中,提出一种抗单音干扰的统一载波测控信号捕获方法,不涉及深空大频偏信号的载波捕获方法。在公告号为cn106817333b的中国专利文献中,提出一种基于开环捕获与闭环跟踪的高动态载波同步方法,采用导频数据进行捕获,不涉及深空大频偏信号的载波捕获方法。在公告号为cn105743495b的中国专利文献中,提出一种实现微弱载波信号捕获的锁相环电路,不涉及深空大频偏信号的载波捕获。
4.在公告号为cn102739575b的中国专利文献中,公开了一种大动态范围载波捕获方法,用于在航天器上实现对上行载波信号的捕获,包括以下步骤:采用固定频率间隔的本地载波对接收到的上行载波信号进行下变频;滤波获得下变频后的中频信号;采用三个抽样频率对所述中频信号进行抽取获得高速抽取信号、中速抽取信号、低速抽取信号;分别对高速抽取信号、中速抽取信号、低速抽取信号的峰值进行判断,对所述上行载波信号进行捕获,并对捕获后的上行载波信号再次进行捕获确认,获得确认后的上行载波信号;获取确定后所述上行载波信号的载波频率和载波功率并输出。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种火星环绕器载波捕获方法及系统。
6.根据本发明提供的一种火星环绕器载波捕获方法,包括以下步骤:
7.步骤s1:对火星环绕器飞行轨迹,深空站与火星环绕器位置变化关系进行仿真分析,确定火星环绕器上行的信号强度变化范围,频率偏移范围和多普勒变化范围;
8.步骤s2:结合步骤s1中的仿真结果和火星环绕器系统接收能力,确定深空应答机前端的上行信号特性包络的最值;
9.步骤s3:根据步骤s2所得的信号特性,计算载波捕获门限下所需的信噪比;
10.步骤s4:根据步骤s3中的信噪比,通过fft变换算法确定最大可靠扫频速率;
11.步骤s5:根据步骤s4中的最大可靠扫频速率,在出现的慢扫频速率范围内预置扫频速率点进行校正,保证输出的慢扫频速率始终小于最大可靠扫频速率,得出准确的频率估计;
12.步骤s6:根据步骤s5中的频率估计结果,输出至后端的载波环中完成跟踪。
13.优选的,所述步骤s2中的上行信号特性,信号强度高于
‑
155dbm,频偏处于
±
100khz内,多普勒变化率小于100hz/s。
14.优选的,所述步骤s3中fft变换算法包括以下子步骤:
15.步骤s3.1:根据采样率和fft计算的采样点数计算fft分辨率带宽;
[0016][0017]
其中b为fft分辨率带宽,l为采样点数,fs为采样率;
[0018]
步骤s3.2:计算单次估计周期t;
[0019][0020]
步骤s3.3:计算最大可靠扫频速率v;
[0021]
10lg(v
·
t)
‑
20lg b=snr
[0022]
其中snr为载波捕获门限所需信噪比。
[0023]
优选的,所述步骤s5中,在慢扫频范围内,中频复信号出现慢扫速率是随机的。
[0024]
优选的,所述步骤s5中,预置扫频速率点间的绝对值小于最大可靠扫频速率。
[0025]
根据本发明提供的一种火星环绕器载波捕获系统,包括以下模块:
[0026]
模块m1:对火星环绕器飞行轨迹,深空站与火星环绕器位置变化关系进行仿真分析,确定火星环绕器上行的信号强度变化范围,频率偏移范围和多普勒变化范围;
[0027]
模块m2:结合模块m1中的仿真结果和火星环绕器系统接收能力,确定深空应答机前端的上行信号特性包络的最值;
[0028]
模块m3:根据模块m2所得的信号特性,计算载波捕获门限下所需的信噪比;
[0029]
模块m4:根据模块m3中的信噪比,通过fft变换算法确定最大可靠扫频速率;
[0030]
模块m5:根据模块m4中的最大可靠扫频速率,在出现的慢扫频速率范围内预置扫频速率点进行校正,保证输出的慢扫频速率始终小于最大可靠扫频速率,得出准确的频率估计;
[0031]
模块m6:根据模块m5中的频率估计结果,输出至后端的载波环中完成跟踪。
[0032]
优选的,所述模块m2中的上行信号特性,信号强度高于
‑
155dbm,频偏处于
±
100khz内,多普勒变化率小于100hz/s。
[0033]
优选的,所述模块m3中fft变换算法包括以下子模块:
[0034]
模块m3.1:根据采样率和fft计算的采样点数计算fft分辨率带宽;
[0035][0036]
其中b为fft分辨率带宽,l为采样点数,fs为采样率;
[0037]
模块m3.2:计算单次估计周期t;
[0038][0039]
模块m3.3:计算最大可靠扫频速率v;
[0040]
10lg(v
·
t)
‑
20lg b=snr
[0041]
其中snr为载波捕获门限所需信噪比。
[0042]
优选的,所述模块m5中,在慢扫频范围内,中频复信号出现慢扫速率是随机的。
[0043]
优选的,所述模块m5中,预置扫频速率点间的绝对值小于最大可靠扫频速率。
[0044]
与现有技术相比,本发明具有如下的有益效果:
[0045]
1、本发明解决了火星探测器4亿公里飞行过程中,接收到的上行信号在捕获门限
‑
155dbm,频偏范围
±
100khz时的载波捕获问题;
[0046]
2、本发明解决了在深空中接收长距离传输信号困难的问题;
[0047]
3、本发明获取的信号可用性较高。
附图说明
[0048]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0049]
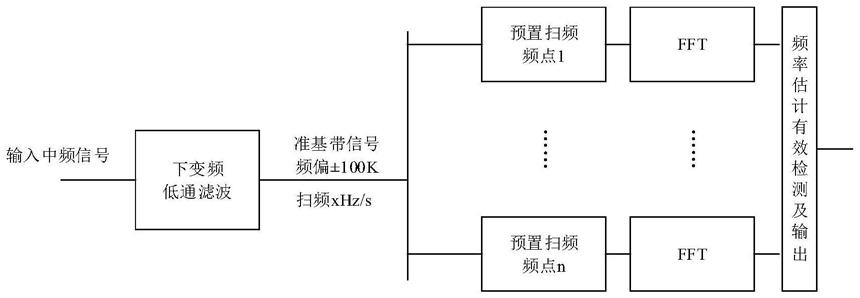
图1为本发明实施例中预置扫频原理框图。
具体实施方式
[0050]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0051]
本发明提供一种火星环绕器载波捕获方法,包括以下步骤:
[0052]
步骤s1:对火星环绕器飞行轨迹,深空站与火星环绕器位置变化关系进行仿真分析,确定火星环绕器上行的信号强度变化范围,频率偏移范围和多普勒变化范围;
[0053]
步骤s2:结合步骤s1中的仿真结果和火星环绕器系统接收能力,确定深空应答机前端的上行信号特性包络的最值;
[0054]
步骤s3:根据步骤s2所得的信号特性,计算载波捕获门限下所需的信噪比;
[0055]
根据采样率和fft计算的采样点数计算fft分辨率带宽;
[0056][0057]
其中b为fft分辨率带宽,l为采样点数,fs为采样率;
[0058]
步骤s3.2:计算单次估计周期t;
[0059][0060]
步骤s3.3:计算最大可靠扫频速率v;
[0061]
10lg(v
·
t)
‑
20lg b=snr
[0062]
其中snr为载波捕获门限所需信噪比。
[0063]
步骤s4:根据步骤s3中的信噪比,通过fft变换算法确定最大可靠扫频速率;
[0064]
步骤s5:根据步骤s4中的最大可靠扫频速率,在出现的慢扫频速率范围内预置扫频速率点进行校正,保证输出的慢扫频速率始终小于最大可靠扫频速率,得出准确的频率估计;在慢扫频范围内,中频复信号出现慢扫速率是随机的。预置扫频速率点间的绝对值小
于最大可靠扫频速率。
[0065]
步骤s6:根据步骤s5中的频率估计结果,输出至后端的载波环中完成跟踪。
[0066]
下面参照图1做进一步说明,首先对火星环绕器的飞行轨迹,包括发射上升段,地火转移段,多次中途修正,深空机动,制动捕获,器器分离以及科学探测等阶段,深空站与环绕器的位置关系,包括阿根廷站、喀什站和佳木斯站的上行能力,以及地球自转和环绕器姿态等因素进行仿真,得出环绕器接收到上行信号捕获能力不弱于
‑
155dbm,输入频率小于
±
100khz,多普勒变化率小于100hz/s。考虑到环绕器接收通道的噪声系数为1.8db,通过转换得到输入信号信噪比19db/hz。
[0067]
采用fft算法确定最大可靠扫频速率,采样率设置200ksps,fft长度取65536点,则fft分辨率带宽:200khz/65536=3.1hz,单次估计周期:65536/200khz=328ms。要保证在328ms时间内fft分辨带宽内snr大于10db,取最大可靠扫频速率为20hz/s,可得所需基带入口信噪比为18.2db/hz,小于19db/hz,满足捕获门限条件。
[0068]
如图1所示,输入中频信号经下变频低通滤波后成为准基带信号,具备随机分布的慢扫特性,假设慢所特性在
±
100hz/s之间任意分布,则可以设置三个校正扫描频率对慢扫频信号进行预先校正,设校正频率为
±
80hz/s,
±
40hz/s,0hz/s,则无论输入信号的扫描频率是什么,可以保证输出的慢扫信号频偏小于20hz/s,对该信号进行直接fft分析,可以得到可靠分析结果。
[0069]
频率估计有效检测结果输出至后端的载波环完成载波捕获跟踪。
[0070]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0071]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。