1.本发明属于智能测试技术领域,尤其涉及一种面向家用智能电视的智能化测试装置。
背景技术:
2.近年来迅猛发展的智能家电领域中,诸如语音交互、体感交互等功能成为行业内重点研究和竞争的方向。然而在家电智能化研究如火如荼,对于各类智能家电智能化水平的定量化测试,却缺少科学、高效的测试方案和测试工具。开发一款智能家电性能测试的机器人的需求十分迫切。
3.但对于智能家电的智能化水平现有的测试方法仍然采用人工方式,即人工地和被测家电进行语音或视觉交互,然而人工方式存在以下缺陷:第一,由于人为主观性,将会带来例如语音播报内容不一致、语音响度(分贝量)不一致等问题,即缺乏标准化;第二,人工测试无法记录测试过程中的完整信息,后续无法进行测试效果的复检;第三,面对众多的家电种类和各式各样的家电型号,完成所有的测试工作将要投入大量的人力成本,同时还存在着劳动强度大和工作效率低的问题。为了改变此情况,需要一种面向家用智能电视的智能化测试装置及方法。
4.中国专利公开了(cn201610803632.0)智能电视的自动化测试方法及装置,包括以下步骤:在接收到所述智能电视的测试指令时,获取所述智能电视对应的测试样本,其中,所述测试样本包括多个测试脚本及所述测试脚本对应的测试参数;在测试执行器处于闲置状态时,依次获取所述测试脚本的测试标识,并控制测试执行器基于所述测试标识对应的测试参数运行所述测试标识对应的测试脚本;在所述测试脚本运行完成时,显示所述测试脚本的测试结果,该方法通过在接收到所述智能电视的测试指令时,获取所述智能电视对应的测试样本,而后在测试执行器处于闲置状态时,依次获取所述测试脚本的测试标识,并控制测试执行器基于所述测试标识对应的测试参数运行所述测试标识对应的测试脚本,最后在所述测试脚本运行完成时,显示所述测试脚本的测试结果,实现了智能电视的自动化测试,避免了采用人工的方式进行测试时受人力因素的影响而造成测试力度不足的情况,提高了测试效率以及测试效果,进而提高了智能电视的质量和可靠性,但该方法并未结合文字识别检测算法和严谨的逻辑推理,无法对通用的智能电视的智能功能进行测试,无法代替大量人力、人机协同完成通用智能电视测试处理的效果,应用效果不佳,需要进行一定改进。
技术实现要素:
5.本发明的目的在于:为了解决上述的问题,而提出的一种面向家用智能电视的智能化测试装置,该装置通过文字识别检测算法实现快速移动对智能电视的功能进行测试。
6.为了实现上述目的,本发明采用了如下技术方案:
7.1、一种面向家用智能电视的智能化测试机器装置,所述装置由机器人构成,其特
征在于,所述机器人上设有摄像头、工控机模块、检测服务模块、数据库和播音机构,所述工控机模块包括文字检测单元和文字识别单元;其中:所述工控模块通过如下步骤实现对家用智能电视的测试:
8.s1、机器人到达指定位置通过播音机构进行语音指令播放,
9.s2、通过摄像头对各条语音指令在智能电视呈现的视频信息进行采集;
10.s3、所述工控机模块通过智能电视对语音指令反映的速度选定下一步多指标测试任务;
11.s4、所述文字检测模块将视频信息进行跳帧分析获得文字检测的坐标信息;
12.s5、所述文字识别单元对文字检测的坐标信息进行识别获得识别文字信息;
13.s6、所述工控机模块识别文字信息与多指标测试任务进行匹配生成第一任务测试报告;
14.s7、所述检测服务模块将第一任务测试报告与数据库内存储的测试内容进行分析生成含有区别分析信息的第二任务测试报告;
15.s9、所述工控机模块对所述第二任务测试报告进行采用二类方法评估获得检索报告;
16.s10、所述工控机模块根据检查报告生成生产功能性方面的建议书与使用性建议书,并分别将生产功能性方面的建议书和使用性建议书分别传输至智能电视厂家和用户群。
17.作为上述技术方案的进一步描述:
18.所述s6中,将文字和测试人员提供的正确答案进行匹配,若存在正确答案则说明智能电视完成该条语音指令,标记为true,若不存在该条语音指令则说明智能电视为完成该语音指令,标记为false,所有测试任务完成后,生成测试任务报告,对于智能电视反应失败的语音指令可由测试人员进行结果查看进行进一步验证。
19.作为上述技术方案的进一步描述:
20.所述摄像头的底部设置有第一过滤板,且第一过滤板嵌接在上肢,所述上肢的背面嵌设有第二过滤板,所述上肢内设置有与第一过滤板相匹配的散热机构,所述散热机构上设置有传动机构,所述传动机构上设置有用于清洁第一过滤板、第二过滤板和摄像头的清洁机构,所述上肢的底部设置有播音机构,且播音机构位于第一过滤板的下方。
21.作为上述技术方案的进一步描述:
22.所述散热机构包括电机,所述电机固定安装在上肢内,所述电机的输出轴上固定设有传动杆,所述传动杆上穿插固定有第一齿轮,所述第一齿轮啮合连接有第二齿轮,所述第二齿轮内穿插固定有第一转轴,且第一转轴的一端与第一过滤板的中部转动连接,所述第一转轴的边侧等弧固定设有若干第一抽气扇叶。
23.作为上述技术方案的进一步描述:
24.所述传动机构包括固定环,所述固定环固定安装在电机上,且电机的输出轴位于固定环内,所述固定环内开设有环形槽,所述环形槽内的一侧固定设有环形电磁铁,所述环形电磁铁的一侧设置有限位环,所述限位环的一侧嵌设有与环形电磁铁相匹配的环形磁铁,所述限位环另一侧的顶端和底端均固定设有连接杆,所述第一齿轮的一侧设置有第一传动环,且连接杆的一端依次穿过固定环和第一齿轮并与第一传动环固定连接,所述第一
传动环的一侧设置有第二传动环,所述第一传动环和第二传动环的相对侧均固定设有相互啮合的齿圈,所述第二传动环的中部穿插固定有第二转轴,且第二转轴与上肢转动连接。
25.作为上述技术方案的进一步描述:
26.所述清洁机构包括第三齿轮,所述第三齿轮与第二转轴穿插固定,所述第三齿轮啮合连接有第四齿轮,所述第四齿轮的中部穿插固定有第三转轴,所述第三转轴的侧边等弧固定设有若干与第二过滤板相匹配的第二抽气扇叶,所述第三转轴的一端嵌设有第一固定杆,所述第一固定杆一侧的两端均嵌设有与第二过滤板相匹配的第一刷毛,所述第三转轴的另一端嵌设有与摄像头和第一过滤板相匹配的第二固定杆,所述第二固定杆一侧的两端分别嵌设有海绵和第二刷毛,所述第一过滤板上等距固定设有若干凸块。
27.综上所述,由于采用了上述技术方案,本发明的有益效果是:
28.1、本发明结合了机器人内部工控机模块的文字识别检测算法和严谨的逻辑推理,可以对通用的智能电视的智能功能进行测试,在可容忍的误判率下,达到了代替大量人力、人机协同完成通用智能电视测试处理的效果,并对新增智能电视具备测试能力,无需后期大量逻辑维护成本,本发明利用人机协同的理念,最小化人工操作,最大化智能操作,由机器人和算法平台代替人工完成枯燥单一的任务,并具备标准化、可复检的效果,本方法还能在生成检测结果后,将其输入数据库内,与以前的数据进行对比分析,从而可分析出现如今的智能电视与之前的智能电视的区别,并进行评估分析,对于厂家可给出如何更好提高智能电视能力的建议,对于用户给出使用建议,使用户具有更佳的使用体验,提高了该方法的功能性与应用效果。
29.2、通过设置的散热机构,可以将机器人内部的电子元件工作产生的热气排到外界,实现了机器人的散热,进而对机器人内部的电子元件起到了保护的作用,提高了该机器人的使用寿命。
30.3、通过设置的第一过滤板和第二过滤板,可以实现机器人与外界的互通,为机器人的散热提供了条件,并且可以防止外界的灰尘进入到机器人内影响机器人内电子元件的工作。
31.4、通过设置的传动机构,配合散热机构,可以使得清洁机构运作清洁机构的第一刷毛和第二刷毛分别刷动第二过滤板和第一过滤板,配合散热机构的第一抽气扇叶和清洁机构的第二抽气扇叶,可以使得清洁产生的粉尘通过第一过滤板和第二过滤板,实现了第一过滤板和第二过滤板的清洁。
32.5、通过设置的清洁机构的海绵,可以实现对摄像头的清洁,提高了实用性。
33.6、通过设置的清洁机构的凸起,使得清洁机构的海绵在经过第一过滤板时挤压膨胀,使得海绵震动,配合散热机构的第一抽气扇叶,可以清洁海绵,便于摄像头的清洁。
附图说明
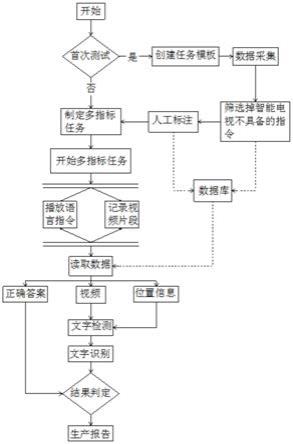
34.图1为本发明提供的面向家用智能电视的智能化测试方法的流程图;
35.图2为本技术提供的面向家用智能电视的智能化测试装置的正面结构示意图;
36.图3为本技术提供的面向家用智能电视的智能化测试装置的背面结构示意图;
37.图4为本技术提供的面向家用智能电视的智能化测试装置的清洁机构的局部结构示意图;
38.图5为本技术提供的面向家用智能电视的智能化测试装置的播音机构的局部结构示意图;
39.图6为本技术提供的面向家用智能电视的智能化测试装置的背面局部结构示意图;
40.图7为本技术提供的面向家用智能电视的智能化测试装置的局部剖面结构示意图;
41.图8为本技术提供的面向家用智能电视的智能化测试装置的传动机构的剖面结构示意图;
42.图9为本技术提供的面向家用智能电视的智能化测试装置的播音机构的局部剖面结构示意图。
43.图例说明:
44.1、机器人;2、摄像头;3、第一过滤板;4、第二过滤板;5、散热机构;501、电机;502、传动杆;503、第一齿轮;504、第二齿轮;505、第一转轴;506、第一抽气扇叶;6、传动机构;601、固定环;602、环形电磁铁;603、限位环;604、环形磁铁;605、连接杆;606、第一传动环;607、第二传动环;608、齿圈;609、第二转轴;7、清洁机构;701、第三齿轮;702、第四齿轮;703、第三转轴;704、第一固定杆;705、第一刷毛;706、第二固定杆;707、海绵;708、第二刷毛;709、凸块;710、第二抽气扇叶;8、播音机构;801、音响;802、挂壁安装座;803、挂钩。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
46.实施例1:
47.请参阅图1,本发明提供一种技术方案:一种面向家用智能电视的智能化测试方法,其中:所述装置由机器人1构成,所述机器人上设有摄像头2、工控机模块、检测服务模块、数据库和播音机构,所述工控机模块包括文字检测单元和文字识别单元;其中:所述工控模块通过如下步骤实现对家用智能电视的测试:
48.s1、机器人1模拟人类进行语音播放,首先测试人员输入待测试语音指令,机器人自主到达指定位置采用标准语言自动化播放各条语音测试指令;
49.s2、通过摄像头2对各条语音指令进行视频信息采集;
50.s3、通过机器人内部工控机模块进行交互筛选出智能电视具备反应能力的语音指令及完成下一步多指标测试任务的选定;
51.s4、所述文字检测单元将视频信息进行跳帧分析获得文字检测的坐标信息;
52.s5、所述文字识别单元对文字检测的坐标信息进行识别获得识别文字信息;
53.s6、所述工控机模块识别文字信息与多指标测试任务进行匹配生成第一任务测试报告;
54.s7、所述检测服务模块将第一任务测试报告与数据库内存储的测试内容进行分析生成含有区别分析信息的第二任务测试报告;
55.s9、所述工控机模块对所述第二任务测试报告进行采用二类方法评估获得检索报告;
56.s10、所述工控机模块根据检查报告生成生产功能性方面的建议书与使用性建议书,并分别将生产功能性方面的建议书和使用性建议书分别传输至智能电视厂家和用户群。
57.如下为本技术提供的面向家用智能电视的智能化测试方法伪代码;
[0058][0059]
实施例2:
[0060]
作为优选的实施方式,在上述方式的基础上,进一步的,s2中,系统平台通过机器人1和机器人1上的摄像头2进行交互,完成每段语音指令对应的视频录制及上传保存,其中结果处理模块主要依靠算法进行处理,在机器人内部有工控机模块进行算法处理。
[0061]
作为优选的实施方式,在上述方式的基础上,进一步的,s3中,通过采样环节的视频片段,由测试人员筛选出智能电视具备测试能力的语音指令进行下一步测试,并对可测试的语音指令添加识别正确的答案以便后续测试中机器人对结果进行判别,测试人员进行下一步测试工作安排,包括添加测试次数、测试方位、测试音量大小和方言。
[0062]
作为优选的实施方式,在上述方式的基础上,进一步的,s4中,通过将各段语音指令对应的视频传入文字检测算法,并跳帧分析视频内容,得到检测到的文字区域坐标信息。
[0063]
作为优选的实施方式,在上述方式的基础上,进一步的,s5中,通过文字识别算法读取各区域的坐标信息并识别得到文字。
[0064]
作为优选的实施方式,在上述方式的基础上,进一步的,s6中,将文字和测试人员提供的正确答案进行匹配,若存在正确答案则说明智能电视完成该条语音指令,标记为true,若不存在该条语音指令则说明智能电视为完成该语音指令,标记为false,所有测试任务完成后,生成测试任务报告,对于智能电视反应失败的语音指令可由测试人员进行结果查看进行进一步验证。
[0065]
实施例3:
[0066]
下面结合具体的工作方式对实施例1和2中的方案进行进一步的介绍,详见下文描述:
[0067]
机器人到达由测试人员选定的最优位置,选择普通话和最优音量进行语音播放,同时视觉摄像机对每段语音指令进行视频录制及上传保存;
[0068]
采样完成后,测试人员通过工控机模块对各条语音指令地视频进行查看,筛掉智能电视无法处理的语音指令,对智能电视可以处理的语音指令制作正确答案,即当文字识别算法识别到该正确答案时候意味着该语音指令的成功,否则标记为失败,另:由于画面内容可能会存在重复部分影响识别结果,因此测试人员可对画面进行位置标注处理,排除掉其它无关部分的内容,多余部分不进行算法处理;
[0069]
测试人员制作多指标测试任务,即:对智能电视可以处理的语音指令进行测试:选择多方位、多音量、多高度、多方言和多次数进行多指标测试;
[0070]
机器人按照测试人员指定的测试任务,进入到指定地点、到达指定高度,选择指定语言和音量大小开始测试,同时视觉摄像机进行视频的采集;
[0071]
当全部语音指令循环一遍后,工控机模块后台运行算法进行处理,即:将视频流和标准答案传入算法中进行检测、识别和判定;
[0072]
其中算法包括文字检测算法和文字识别算法,首先视频流分成各帧图片分别输入到文字检测算法得到图片中存在文字区域的坐标信息,并将坐标信息输入到文字识别算法进行识别,将识别到的结果和数据库里测试人员已经制定的各条指令的正确答案进行匹配,如果匹配成功则标记为true,否则为false;
[0073]
统计所有语音指令判别结果进行存储,同时进行下一次循环,直到指定的测试次数后结束。平台整理所有测试结果,生成测试报告;
[0074]
标记为false的结果,可由测试人员进一步查看进行验证,发现原因,避免错检;
[0075]
将识别到的文字和正确答案进行匹配得出测试结果,生成测试报告,将测试报告保存,并传输至数据库内,自动搜寻以前的检测结果,与本次的测试报告进行比对;
[0076]
分析出以前的测试报告与本次测试报告的不同部分,并进行不同性分析,得到测试智能电视相较于原来的智能电视的区别,对于二类结果进行评估;
[0077]
得到检索报告,并自动生成生产功能性方面的建议与使用性建议,一方面传输至智能电视厂家,一方面传输至用户群内,完成整体测试。
[0078]
需要说明的是:文字检测算法和文字识别算法采用分层聚类的思想,整体思想是为了避免无法得到不同层次的目标的问题,采用小区域不断一步步往上聚类得到不同层次目标区域的结果。首先把图像按分割的方法分成一个个小区域,然后按照特性(颜色、纹理、尺寸、交叠)计算相似性并把相似度高且大小合适的聚起来,最后就得到了不同层次的目标,进行文字检测和文字识别,其算法步骤如下:
[0079]
input:(colour)image
[0080]
output:setof object location hypotheses l
[0081]
obtain initial regions r={r1.....r
n
}using[13]
[0082]
initialise similarity set s=0
[0083]
foreach neighbouring region pair(r
i
,r
j
)do
[0084]
calculate similarity s(r
i
,r
j
)
[0085]
s=sus(r
i
,r
j
)
[0086]
get highest similarity s(r
i
,r
j
)=max(s)
[0087]
merge corresponding regionsrr
t
=r
i
ur
j
[0088]
remove similarities regardingr
i
:s=s\s(r
i
,r
*
)
[0089]
remove similarities regardingrr
j
:s=s\s(r
*
,r
j
)
[0090]
calculate similarity set s
t
,between r
t
,and its neighbours
[0091]
s=sus
t
[0092]
r=rur
t
[0093]
extract object location boxes l from all regions in r。
[0094]
实施例4:
[0095]
请参阅图2
‑
9,本发明还公开了一种面向家用智能电视的智能化测试装置,包括机器人1,机器人1由上肢和下肢组成,上肢还包括有工控机模块和激光雷达,下肢还包括有单片机、imu、超声波传感器、电机驱动及编码器电机,上肢正面的顶部嵌设有摄像头2,摄像头2优选为大华网络摄像头,摄像头2对各条语音指令进行视频信息采集,摄像头2的底部设置有第一过滤板3,在第一过滤板3的作用下使得机器人1与外界互通,且可以防止灰尘进入到机器人1内,且第一过滤板3嵌接在上肢,上肢的背面嵌设有第二过滤板4,在第二过滤板4的作用下使得机器人1与外界互通,且可以防止灰尘进入到机器人1内,上肢内设置有与第一过滤板3相匹配的散热机构5,散热机构5可以对机器人1进行散热,散热机构5上设置有传动机构6,传动机构6上设置有用于清洁第一过滤板3、第二过滤板4和摄像头2的清洁机构7,上肢的底部设置有播音机构8,播音机构8可以播放各条语音指令,且播音机构8位于第一过滤板3的下方。
[0096]
作为优选的实施方式,在上述方式的基础上,进一步的,散热机构5包括电机501,
电机501固定安装在上肢内,电机501的输出轴上固定设有传动杆502,电机501输出轴转动可以带动传动杆502转动,传动杆502上穿插固定有第一齿轮503,传动杆502转动可以带动第一齿轮503转动,第一齿轮503啮合连接有第二齿轮504,第一齿轮503带动第二齿轮504转动,第二齿轮504内穿插固定有第一转轴505,且第一转轴505的一端与第一过滤板3的中部转动连接,第二齿轮504可以带动第一转轴505转动,第一转轴505的边侧等弧固定设有若干第一抽气扇叶506,第一转轴505带动第一抽气扇叶506转动,可以将机器人1内部的气体排出。
[0097]
作为优选的实施方式,在上述方式的基础上,进一步的,传动机构6包括固定环601,固定环601固定安装在电机501上,且电机501的输出轴位于固定环601内,固定环601内开设有环形槽,环形槽内的一侧固定设有环形电磁铁602,环形电磁铁602的一侧设置有限位环603,限位环603的一侧嵌设有与环形电磁铁602相匹配的环形磁铁604,限位环603另一侧的顶端和底端均固定设有连接杆605,第一齿轮503的一侧设置有第一传动环606,且连接杆605的一端依次穿过固定环601和第一齿轮503并与第一传动环606固定连接,第一传动环606的一侧设置有第二传动环607,第一传动环606和第二传动环607的相对侧均固定设有相互啮合的齿圈608,第二传动环607的中部穿插固定有第二转轴609,且第二转轴609与上肢转动连接。
[0098]
作为优选的实施方式,在上述方式的基础上,进一步的,清洁机构7包括第三齿轮701,第三齿轮701与第二转轴609穿插固定,第三齿轮701啮合连接有第四齿轮702,第四齿轮702的中部穿插固定有第三转轴703,第三转轴703的侧边等弧固定设有若干与第二过滤板4相匹配的第二抽气扇叶710,第三转轴703的一端嵌设有第一固定杆704,第一固定杆704一侧的两端均嵌设有与第二过滤板4相匹配的第一刷毛705,第三转轴703的另一端嵌设有与摄像头2和第一过滤板3相匹配的第二固定杆706,第二固定杆706一侧的两端分别嵌设有海绵707和第二刷毛708,第一过滤板3上等距固定设有若干凸块709。
[0099]
作为优选的实施方式,在上述方式的基础上,进一步的,播音机构8包括音响801,音响801设置在机器人1上,音响801的四个边角处均固定设有挂壁安装座802,挂壁安装座802上设置有挂钩803,挂壁安装座802可以挂在挂钩803上,便于音响801与机器人1拆装,提高了实用性。
[0100]
实施例5:
[0101]
下面结合具体的工作方式对实施例4中的方案进行进一步的介绍,详见下文描述:
[0102]
工作原理:当需要对机器人1进行散热时,控制电机501工作,电机501的输出轴带动传动杆502转动,传动杆502带动第一齿轮503转动,使得第二齿轮504转动,进而使得第一转轴505带动第一抽气扇叶506转动,从而可以将机器人1内电子元件工作产生的热气排到外界,实现了机器人1的散热,进而对机器人1内部的电子元件起到了保护的作用,提高了该机器人1的使用寿命;当需要清洁第一过滤板3、第二过滤板4和摄像头2时,控制电机501和环形电磁铁602工作,环形电磁铁602工作产生与环形磁铁604相同的磁性,使得限位环603带动连接杆605移动,进而使得第一传动环606带动其上的齿圈608移动至与第二传动环607上的齿圈608啮合连接,电机501工作,使得第一齿轮503和第二转轴609转动,第二转轴609带动第三齿轮701转动,第三齿轮701带动第四齿轮702转动,第四齿轮702带动第三转轴703转动,第三转轴703带动第二抽气扇叶710、第一固定杆704和第二固定杆706转动,第一固定
杆704转动使得第一刷毛705刷动第二过滤板4,第二固定杆706转动使得第二刷毛708刷动第一过滤板3、海绵707清洁摄像头2,配合第一抽气扇叶506和第二抽气扇叶710,可以将清洁产生的粉尘脱离第一过滤板3和第二过滤板4,通过凸块709,海绵707在经过第一过滤板3时挤压膨胀,使得海绵707震动,配合第一抽气扇叶506,可以清洁海绵707,便于摄像头2的清洁。
[0103]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。