1.本发明涉及脊柱侧弯检测领域,具体涉及一种脊柱侧弯检测装置及脊柱侧弯检测方法。
背景技术:
2.脊柱侧弯检测作为骨科检测的重要项目,在青少年脊柱疾病预防、矫正和脊柱疾病诊疗方面具由重要意义;
3.目前常规的检测方法为脊柱侧弯测量尺和x光、ct等影像检测方法,近些年发展出大型三维光学检测设备;
4.其中,脊柱侧弯测量尺结构简单,但是对医生而言操作复杂,结果不直观;透视影像检查辐射量大,对人体有潜在伤害,检测费用高,然而大型三维光学设备又很昂贵。
技术实现要素:
5.本发明要解决的技术问题是现有的脊柱侧弯测量尺结构简单,但是对医生而言操作复杂,结果不直观;透视影像检查辐射量大,对人体有潜在伤害,检测费用高,然而大型三维光学设备又很昂贵,本发明提供一种脊柱侧弯检测装置,还提供一种脊柱侧弯检测方法,采用运动传感器、地磁传感器、距离检测器为核心器件安装在手持壳体上,依据手持壳体上的两个第一滚轮与两个第二滚轮在人体背部脊柱上进行移动,实时获取脊柱各个测量点的空间角度变化数据,通过算法得到脊柱的空间曲线,并计算得到脊柱扭转的角度变化数值,从而得到脊柱侧弯数据,结构简单,便于使用,用以解决现有技术导致的缺陷。
6.为解决上述技术问题本发明提供以下的技术方案:
7.第一方面,一种脊柱侧弯检测装置,其中,包含手持壳体、安装于所述手持壳体内部的运动传感器与地磁传感器与充电电池与控制板、安装于所述手持壳体底部中间的靶标发生器,所述手持壳体一端的两侧分别轴动安装有第一滚轮,所述手持壳体另一端的两侧分别轴动安装有第二滚轮,所述手持壳体两侧或两个所述第一滚轮上安装有距离检测器,所述运动传感器、所述地磁传感器、所述距离检测器均与所述控制板连接实现数据传输,所述充电电池电连接于所述控制板、所述靶标发生器;
8.所述手持壳体上安装有控制所述控制板的控制开关,所述控制板控制连接所述靶标发生器,所述靶标发生器的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
9.上述的一种脊柱侧弯检测装置,其中,所述运动传感器为加速度传感器或陀螺仪传感器或用其他的mems运动传感器替换,所述运动传感器与所述地磁传感器结合,可以得到所述运动传感器与所述地磁传感器所在位置的空间x、y、z三轴转动角度变化,将所述运动传感器和所述地磁传感器安装在所述手持壳体内部,所述手持壳体上通过轮轴固定的两个所述第一滚轮与两个所述第二滚轮构成的平面与所述运动传感器和所述地磁传感器的安装面垂直,且当两个所述第一滚轮与两个所述第二滚轮在人体背部脊柱外侧滚动时,两
个所述第一滚轮与两个所述第二滚轮接触皮肤的四个点形成的平面和脊柱相切,既可以使所述运动传感器与所述地磁传感器的测量面和脊柱测量点切线始终垂直,随者两个所述第一滚轮与两个所述第二滚轮沿着脊柱运动,就可以得到一系列垂直于脊柱测量点位置切线的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
10.所述手持壳体的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
11.所述第一滚轮与所述第二滚轮的长度大于等于15mm,使所述第一滚轮与所述第二滚轮的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
12.上述的一种脊柱侧弯检测装置,其中,所述距离检测器为光敏传感器,所述手持壳体两侧均安装有用于检测所述第一滚轮旋转距离的所述光敏传感器,所述第一滚轮面向所述光敏传感器的一端安装有环形板,所述环形板沿圆心等距安装有多个反光板,所述光敏传感器与所述控制板连接实现数据传输;通过识别所述第一滚轮上的所述反光板来计算所述第一滚轮的旋转角度,通过旋转角度和所述第一滚轮的周长计算滚动距离;
13.两侧均安装有用于检测所述第一滚轮旋转距离的所述光敏传感器是由于在弯曲路径滚动时,左右两侧的所述第一滚轮的滚动距离会不一样,但两个所述第一滚轮之间的间距固定且不变,通过同时计算左右两侧的所述第一滚轮的滚动距离,可以得到两个所述第一滚轮连线中心位置,也就是脊柱中心位置的滚动距离,所述控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
14.第二方面,一种脊柱侧弯检测装置,其中,包含手持壳体、安装于所述手持壳体内部的运动传感器与地磁传感器与充电电池与控制板、安装于所述手持壳体底部中间的靶标发生器,所述手持壳体一端的两侧分别轴动安装有第一滚轮,所述手持壳体另一端的两侧分别轴动安装有第二滚轮,所述手持壳体两侧或两个所述第一滚轮上安装有距离检测器,所述运动传感器、所述地磁传感器、所述距离检测器均与所述控制板连接实现数据传输,所述充电电池电连接于所述控制板、所述靶标发生器;
15.所述手持壳体上安装有控制所述控制板的控制开关,所述控制板控制连接所述靶标发生器,所述靶标发生器的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
16.上述的一种脊柱侧弯检测装置,其中,所述运动传感器为加速度传感器或陀螺仪传感器或用其他的mems运动传感器替换,所述运动传感器与所述地磁传感器结合,可以得到所述运动传感器与所述地磁传感器所在位置的空间x、y、z三轴转动角度变化,将所述运动传感器和所述地磁传感器安装在所述手持壳体内部,所述手持壳体上通过轮轴固定的两个所述第一滚轮与两个所述第二滚轮构成的平面与所述运动传感器和所述地磁传感器的安装面垂直,且当两个所述第一滚轮与两个所述第二滚轮在人体背部脊柱外侧滚动时,两个所述第一滚轮与两个所述第二滚轮接触皮肤的四个点形成的平面和脊柱相切,既可以使所述运动传感器与所述地磁传感器的测量面和脊柱测量点切线始终垂直,随者两个所述第
一滚轮与两个所述第二滚轮沿着脊柱运动,就可以得到一系列垂直于脊柱测量点位置切线的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
17.所述手持壳体的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
18.所述第一滚轮与所述第二滚轮的长度大于等于15mm,使所述第一滚轮与所述第二滚轮的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
19.上述的一种脊柱侧弯检测装置,其中,所述距离检测器为电容触摸传感器,每个所述第一滚轮的外围均等距安装有多个所述电容触摸传感器;
20.所述电容触摸传感器与所述控制板连接实现数据传输;
21.所述第一滚轮滚动时所述电容触摸传感器接触到人体皮肤发生电容变化,并生成传输至所述控制板的触发信号数据,所述控制板结合相邻两个所述电容触摸传感器的相对弧长计算滚动距离;
22.两侧均安装有用于检测所述第一滚轮旋转距离的所述电容触摸传感器是由于在弯曲路径滚动时,左右两侧的所述第一滚轮的滚动距离会不一样,但两个所述第一滚轮之间的间距固定且不变,通过同时计算左右两侧的所述第一滚轮的滚动距离,可以得到两个所述第一滚轮连线中心位置,也就是脊柱中心位置的滚动距离,所述控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
23.第三方面,一种脊柱侧弯检测装置,其中,包含手持壳体、安装于所述手持壳体内部的运动传感器与地磁传感器与充电电池与控制板、安装于所述手持壳体底部中间的靶标发生器,所述手持壳体一端的两侧分别轴动安装有第一滚轮,所述手持壳体另一端的两侧分别轴动安装有第二滚轮,所述手持壳体两侧或两个所述第一滚轮上安装有距离检测器,所述运动传感器、所述地磁传感器、所述距离检测器均与所述控制板连接实现数据传输,所述充电电池电连接于所述控制板、所述靶标发生器;
24.所述手持壳体上安装有控制所述控制板的控制开关,所述控制板控制连接所述靶标发生器,所述靶标发生器的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
25.上述的一种脊柱侧弯检测装置,其中,所述运动传感器为加速度传感器或陀螺仪传感器或用其他的mems运动传感器替换,所述运动传感器与所述地磁传感器结合,可以得到所述运动传感器与所述地磁传感器所在位置的空间x、y、z三轴转动角度变化,将所述运动传感器和所述地磁传感器安装在所述手持壳体内部,所述手持壳体上通过轮轴固定的两个所述第一滚轮与两个所述第二滚轮构成的平面与所述运动传感器和所述地磁传感器的安装面垂直,且当两个所述第一滚轮与两个所述第二滚轮在人体背部脊柱外侧滚动时,两个所述第一滚轮与两个所述第二滚轮接触皮肤的四个点形成的平面和脊柱相切,既可以使所述运动传感器与所述地磁传感器的测量面和脊柱测量点切线始终垂直,随者两个所述第一滚轮与两个所述第二滚轮沿着脊柱运动,就可以得到一系列垂直于脊柱测量点位置切线
的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
26.所述手持壳体的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
27.所述第一滚轮与所述第二滚轮的长度大于等于15mm,使所述第一滚轮与所述第二滚轮的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
28.上述的一种脊柱侧弯检测装置,其中,所述距离检测器为压力传感器,每个所述第一滚轮的外围均等距安装有多个所述压力传感器;
29.所述电容触摸传感器与所述控制板连接实现数据传输;
30.所述第一滚轮滚动时所述压力传感器接触到人体皮肤发生压力变化,并生成传输至所述控制板的触发信号数据,所述控制板结合相邻两个所述压力传感器的相对弧长计算滚动距离;
31.两侧均安装有用于检测所述第一滚轮旋转距离的所述压力传感器是由于在弯曲路径滚动时,左右两侧的所述第一滚轮的滚动距离会不一样,但两个所述第一滚轮之间的间距固定且不变,通过同时计算左右两侧的所述第一滚轮的滚动距离,可以得到两个所述第一滚轮连线中心位置,也就是脊柱中心位置的滚动距离,所述控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
32.第四方面,一种脊柱侧弯检测方法,其中,包含以下步骤:
33.步骤1:将脊柱侧弯检测装置开启后放在人体背部脊柱外侧,使得两个第一滚轮与两个第二滚轮紧贴皮肤,两个第一滚轮与两个第二滚轮和皮肤接触的部位形成一个平面,平面和皮肤表面相切;
34.步骤2:推动手持壳体使得两个第一滚轮与两个第二滚轮沿着脊柱移动,移动时将靶标发生器的激光始终照射在脊柱中线上,两个距离检测器实时检测并将检测数据传输至控制板,控制板依据检测数据分别计算两个第一滚轮的滚动距离,推动手持壳体时,两个第一滚轮转轴的连线和行进方向,即与脊柱中线方向垂直,两个第二滚轮转轴的连线和行进方向,即与脊柱中线方向垂直;
35.通过运动传感器与地磁传感器获取脊柱测量点的空间角度变化得到传输至控制板的空间角度变化数据;
36.步骤3:控制板依据滚动距离与空间角度变化数据计算得到每一个脊柱测量点的空间坐标,将空间坐标连接成一条空间曲线;
37.步骤4:控制板依据空间曲线上的每一个点得到一个垂直于该空间曲线的垂面、以及点在这个垂面上的转动角度;
38.步骤5:将空间曲线在人体矢状面和人体冠状面进行投影,得到脊柱矢状面和脊柱冠状面的弯曲特性,将每个点在垂直于脊柱测量点的垂面上的转动角度进行测量,得到脊柱扭转的角度变化数值。
39.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的所述距离检测器为光敏传感
器,采用所述光敏传感器获取所述滚动距离的具体方法如下:
40.两个所述光敏传感器分别检测两个所述第一滚轮的旋转角度得到传输至所述控制板的角度数据;
41.所述控制板依据所述角度数据与所述第一轮滚的周长分别计算两个所述第一滚轮的滚动距离。
42.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的所述距离检测器为电容触摸传感器,采用所述电容触摸传感器获取所述滚动距离的具体方法如下:
43.两个所述第一滚轮上的多个所述电容触摸传感器与人体皮肤接触发生电容变化并生成传输至所述控制板的触发信号数据;
44.所述控制板依据所述触发信号数据与每相邻两个所述电容触摸传感器之间的弧长数据分别计算两个所述第一滚轮的滚动距离。
45.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的所述距离检测器为压力传感器,采用所述压力传感器获取所述滚动距离的具体方法如下:
46.两个所述第一滚轮上的多个所述压力传感器与人体皮肤接触发生压力变化并生成传输至所述控制板的触发信号数据;
47.所述控制板依据所述触发信号数据与每相邻两个所述压力传感器之间的弧长数据分别计算两个所述第一滚轮的滚动距离。
48.上述的一种脊柱侧弯检测方法,其中,步骤3中所述控制板依据所述滚动距离与空间角度变化数据计算得到每一个脊柱测量点的空间坐标的具体方法为:
49.根据左右两侧所述第一滚轮得到的滚动距离取中心位置得到脊柱的空间坐标;
50.所述空间角度变化数据包含脊柱测量点的俯仰角数据、滚转角数据、航向角数据。
51.依据上述本发明一种脊柱侧弯检测装置及脊柱侧弯检测方法提供的技术方案具有一下技术效果:
52.采用运动传感器、地磁传感器、距离检测器为核心器件安装在手持壳体上,依据手持壳体上的两个第一滚轮与两个第二滚轮在人体背部脊柱上进行移动,实时获取脊柱各个测量点的空间角度变化数据,通过算法得到脊柱的空间曲线,并计算得到脊柱扭转的角度变化数值,从而得到脊柱侧弯数据,结构简单,便于使用;
53.增设有靶标发生器,靶标发生器的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
附图说明
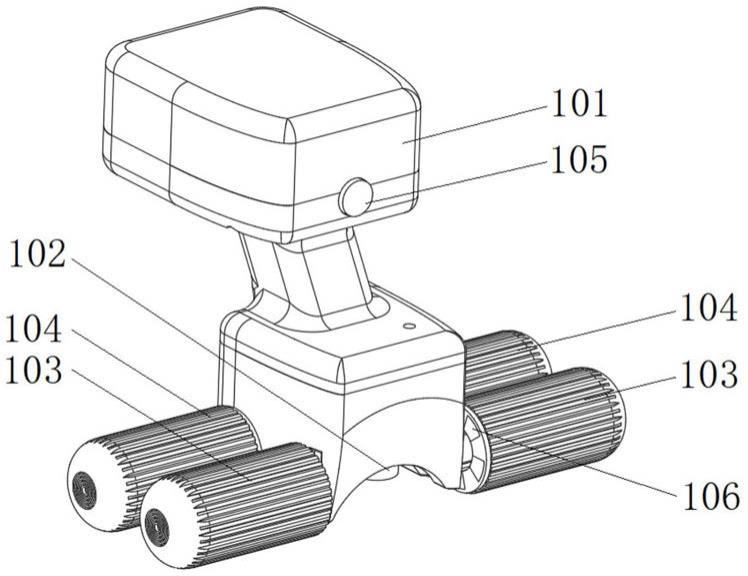
54.图1为本发明一种脊柱侧弯检测装置的结构示意图;
55.图2为本发明一种脊柱侧弯检测装置中环形板与光敏传感器的位置关系结构示意图;
56.图3为依据本发明一种脊柱侧弯检测装置获取的脊柱测量点空间曲线图;
57.图4为依据本发明一种脊柱侧弯检测装置检测得到的空间角度变化数据后制作的空间曲线。
58.其中,附图标记如下:
59.手持壳体101、靶标发生器102、第一滚轮103、第二滚轮104、控制开关105、反光板106、环形板201、光敏传感器202。
具体实施方式
60.为了使发明实现的技术手段、创造特征、达成目的和功效易于明白了解,下结合具体图示,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。
61.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
62.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
63.同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
64.本发明的一较佳实施例是提供一种脊柱侧弯检测装置及脊柱侧弯检测方法,目的是采用运动传感器、地磁传感器、距离检测器为核心器件安装在手持壳体上,依据手持壳体上的两个第一滚轮与两个第二滚轮在人体背部脊柱上进行移动,实时获取脊柱各个测量点的空间角度变化数据,通过算法得到脊柱的空间曲线,并计算得到脊柱扭转的角度变化数值,从而得到脊柱侧弯数据,结构简单,便于使用。
65.如图1所示,第一方面,一种脊柱侧弯检测装置,其中,包含手持壳体101、安装于手持壳体101内部的运动传感器与地磁传感器与充电电池与控制板、安装于手持壳体101底部中间的靶标发生器102,手持壳体101一端的两侧分别轴动安装有第一滚轮103,手持壳体101另一端的两侧分别轴动安装有第二滚轮104,手持壳体101两侧或两个第一滚轮103上安装有距离检测器,运动传感器、地磁传感器、距离检测器均与控制板连接实现数据传输,充电电池电连接于控制板、靶标发生器102;
66.手持壳体101上安装有控制控制板的控制开关105,控制板控制连接靶标发生器102,靶标发生器102的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
67.上述的一种脊柱侧弯检测装置,其中,运动传感器为加速度传感器或陀螺仪传感器或用其他的mems运动传感器替换,运动传感器与地磁传感器结合,可以得到运动传感器与地磁传感器所在位置的空间x、y、z三轴转动角度变化,将运动传感器和地磁传感器安装在手持壳体101内部,手持壳体101上通过轮轴固定的两个第一滚轮103与两个第二滚轮104构成的平面与运动传感器和地磁传感器的安装面垂直,且当两个第一滚轮103与两个第二滚轮104在人体背部脊柱外侧滚动时,两个第一滚轮103与两个第二滚轮104接触皮肤的四个点形成的平面和脊柱相切,既可以使运动传感器与地磁传感器的测量面和脊柱测量点(测量点)切线始终垂直,随者两个第一滚轮103与两个第二滚轮104沿着脊柱运动,就可以
得到一系列垂直于脊柱测量点(测量点)位置切线的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
68.手持壳体101的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
69.第一滚轮103与第二滚轮104的长度大于等于15mm,使第一滚轮103与第二滚轮104的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
70.如图2所示,上述的一种脊柱侧弯检测装置,其中,距离检测器为光敏传感器202,手持壳体101两侧均安装有用于检测第一滚轮103旋转距离的光敏传感器202,第一滚轮103面向光敏传感器202的一端安装有环形板201,环形板201沿圆心等距安装有多个反光板106,光敏传感器202与控制板连接实现数据传输;通过识别第一滚轮103上的反光板106来计算第一滚轮103的旋转角度,通过旋转角度和第一滚轮103的周长计算滚动距离,假设有十个反光板106,那每次光敏传感器202检测到一个信号的第一滚转轮动距离为1/10第一滚轴的周长;
71.如图3所示(左侧空间曲线为一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,右侧空间曲线为另一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,中间的空间曲线为根据左右两侧空间曲线中点坐标连线中点的空间曲线),两侧均安装有用于检测第一滚轮103旋转距离的光敏传感器202是由于在弯曲路径滚动时,左右两侧的第一滚轮103的滚动距离会不一样,但两个第一滚轮103之间的间距固定且不变,通过同时计算左右两侧的第一滚轮103的滚动距离,可以得到两个第一滚轮103连线中心位置,也就是脊柱中心位置的滚动距离,控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点(测量点)上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点(测量点)的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点(测量点)的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点(测量点)的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
72.如图1所示,第二方面,一种脊柱侧弯检测装置,其中,包含手持壳体101、安装于手持壳体101内部的运动传感器与地磁传感器与充电电池与控制板、安装于手持壳体101底部中间的靶标发生器102,手持壳体101一端的两侧分别轴动安装有第一滚轮103,手持壳体101另一端的两侧分别轴动安装有第二滚轮104,手持壳体101两侧或两个第一滚轮103上安装有距离检测器,运动传感器、地磁传感器、距离检测器均与控制板连接实现数据传输,充电电池电连接于控制板、靶标发生器102;
73.手持壳体101上安装有控制控制板的控制开关105,控制板控制连接靶标发生器102,靶标发生器102的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
74.上述的一种脊柱侧弯检测装置,其中,运动传感器为加速度传感器或陀螺仪传感器或用其他的mems运动传感器替换,运动传感器与地磁传感器结合,可以得到运动传感器与地磁传感器所在位置的空间x、y、z三轴转动角度变化,将运动传感器和地磁传感器安装在手持壳体101内部,手持壳体101上通过轮轴固定的两个第一滚轮103与两个第二滚轮104
构成的平面与运动传感器和地磁传感器的安装面垂直,且当两个第一滚轮103与两个第二滚轮104在人体背部脊柱外侧滚动时,两个第一滚轮103与两个第二滚轮104接触皮肤的四个点形成的平面和脊柱相切,既可以使运动传感器与地磁传感器的测量面和脊柱测量点(测量点)切线始终垂直,随者两个第一滚轮103与两个第二滚轮104沿着脊柱运动,就可以得到一系列垂直于脊柱测量点(测量点)位置切线的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
75.手持壳体101的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
76.第一滚轮103与第二滚轮104的长度大于等于15mm,使第一滚轮103与第二滚轮104的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
77.上述的一种脊柱侧弯检测装置,其中,距离检测器为电容触摸传感器,每个第一滚轮103的外围均等距安装有多个电容触摸传感器;
78.电容触摸传感器与控制板连接实现数据传输;
79.第一滚轮103滚动时电容触摸传感器接触到人体皮肤发生电容变化,并生成传输至控制板的触发信号数据,控制板结合相邻两个电容触摸传感器的相对弧长计算滚动距离;
80.如图3所示(左侧空间曲线为一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,右侧空间曲线为另一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,中间的空间曲线为根据左右两侧空间曲线中点坐标连线中点的空间曲线),两侧均安装有用于检测第一滚轮103旋转距离的电容触摸传感器是由于在弯曲路径滚动时,左右两侧的第一滚轮103的滚动距离会不一样,但两个第一滚轮103之间的间距固定且不变,通过同时计算左右两侧的第一滚轮103的滚动距离,可以得到两个第一滚轮103连线中心位置,也就是脊柱中心位置的滚动距离,控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点(测量点)上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点(测量点)的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点(测量点)的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点(测量点)的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
81.如图1所示,第三方面,一种脊柱侧弯检测装置,其中,包含手持壳体101、安装于手持壳体101内部的运动传感器与地磁传感器与充电电池与控制板、安装于手持壳体101底部中间的靶标发生器102,手持壳体101一端的两侧分别轴动安装有第一滚轮103,手持壳体101另一端的两侧分别轴动安装有第二滚轮104,手持壳体101两侧或两个第一滚轮103上安装有距离检测器,运动传感器、地磁传感器、距离检测器均与控制板连接实现数据传输,充电电池电连接于控制板、靶标发生器102;
82.手持壳体101上安装有控制控制板的控制开关105,控制板控制连接靶标发生器102,靶标发生器102的激光垂直照射到皮肤表面,用于指示脊柱中线,当测量时,人手操作脊柱侧弯检测装置时,要使激光光斑始终照射到脊柱中心位置,确保测量的准确性。
83.上述的一种脊柱侧弯检测装置,其中,运动传感器为加速度传感器或陀螺仪传感
器或用其他的mems运动传感器替换,运动传感器与地磁传感器结合,可以得到运动传感器与地磁传感器所在位置的空间x、y、z三轴转动角度变化,将运动传感器和地磁传感器安装在手持壳体101内部,手持壳体101上通过轮轴固定的两个第一滚轮103与两个第二滚轮104构成的平面与运动传感器和地磁传感器的安装面垂直,且当两个第一滚轮103与两个第二滚轮104在人体背部脊柱外侧滚动时,两个第一滚轮103与两个第二滚轮104接触皮肤的四个点形成的平面和脊柱相切,既可以使运动传感器与地磁传感器的测量面和脊柱测量点(测量点)切线始终垂直,随者两个第一滚轮103与两个第二滚轮104沿着脊柱运动,就可以得到一系列垂直于脊柱测量点(测量点)位置切线的空间角度变化,其空间角度变化包含俯仰角、滚转角和航向角;
84.手持壳体101的底部为弧形,用于避让脊柱骨骼的凸起,防止对测量的干扰;
85.第一滚轮103与第二滚轮104的长度大于等于15mm,使第一滚轮103与第二滚轮104的表面能够始终可以接触到脊柱两侧肌肉皮肤的最高点。
86.上述的一种脊柱侧弯检测装置,其中,距离检测器为压力传感器,每个第一滚轮103的外围均等距安装有多个压力传感器;
87.电容触摸传感器与控制板连接实现数据传输;
88.第一滚轮103滚动时压力传感器接触到人体皮肤发生压力变化,并生成传输至控制板的触发信号数据,控制板结合相邻两个压力传感器的相对弧长计算滚动距离;
89.如图3所示(左侧空间曲线为一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,右侧空间曲线为另一侧第一滚轮103滚动时距离传感器检测到第一滚轮103滚动距离和检测时间点对应坐标点连接的空间曲线,中间的空间曲线为根据左右两侧空间曲线中点坐标连线中点的空间曲线),两侧均安装有用于检测第一滚轮103旋转距离的压力传感器是由于在弯曲路径滚动时,左右两侧的第一滚轮103的滚动距离会不一样,但两个第一滚轮103之间的间距固定且不变,通过同时计算左右两侧的第一滚轮103的滚动距离,可以得到两个第一滚轮103连线中心位置,也就是脊柱中心位置的滚动距离,控制板再通过滚动距离和按滚动距离测量的一系列脊柱测量点(测量点)上的俯仰角、滚转角和航向角就可以计算得到每一个脊柱测量点(测量点)的空间坐标,将空间坐标连接成一条空间曲线得到脊柱测量点(测量点)的空间曲线,将空间曲线上每一个点都可以得到一个垂直于该空间曲线的垂面,以及点在这个垂面上的转动角度;将空间曲线在人体矢状面和冠状面上进行投影,可以得到脊柱的矢状面和冠状面的弯曲特性,通过将每个点在垂直于脊柱测量点(测量点)的垂面上的转动角度进行测量,就可以得到脊柱扭转的角度变化数值。
90.第四方面,一种脊柱侧弯检测方法,其中,包含以下步骤:
91.步骤1:将脊柱侧弯检测装置开启后放在人体背部脊柱外侧,使得两个第一滚轮103与两个第二滚轮104紧贴皮肤,两个第一滚轮103与两个第二滚轮104和皮肤接触的部位形成一个平面,平面和皮肤表面相切;
92.步骤2:推动手持壳体101使得两个第一滚轮103与两个第二滚轮104沿着脊柱移动,移动时将靶标发生器102的激光始终照射在脊柱中线上,两个距离检测器实时检测并将检测数据传输至控制板,控制板依据检测数据分别计算两个第一滚轮103的滚动距离,推动手持壳体101时,两个第一滚轮103转轴的连线和行进方向,即与脊柱中线方向垂直,两个第
二滚轮104转轴的连线和行进方向,即与脊柱中线方向垂直;
93.通过运动传感器与地磁传感器获取脊柱测量点(测量点)的空间角度变化得到传输至控制板的空间角度变化数据;
94.步骤3:控制板依据滚动距离与空间角度变化数据计算得到每一个脊柱测量点(测量点)的空间坐标,将空间坐标连接成一条空间曲线;
95.步骤4:控制板依据空间曲线上的每一个点得到一个垂直于该空间曲线的垂面、以及点在这个垂面上的转动角度;
96.步骤5:将空间曲线在人体矢状面和人体冠状面进行投影,得到脊柱矢状面和脊柱冠状面的弯曲特性,将每个点在垂直于脊柱测量点(测量点)的垂面上的转动角度进行测量,得到脊柱扭转的角度变化数值。
97.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的距离检测器为光敏传感器202,采用光敏传感器202获取滚动距离的具体方法如下:
98.两个光敏传感器202分别检测两个第一滚轮103的旋转角度得到传输至控制板的角度数据;
99.控制板依据角度数据与第一轮滚的周长分别计算两个第一滚轮103的滚动距离。
100.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的距离检测器为电容触摸传感器,采用电容触摸传感器获取滚动距离的具体方法如下:
101.两个第一滚轮103上的多个电容触摸传感器与人体皮肤接触发生电容变化并生成传输至控制板的触发信号数据;
102.控制板依据触发信号数据与每相邻两个电容触摸传感器之间的弧长数据分别计算两个第一滚轮103的滚动距离。
103.上述的一种脊柱侧弯检测方法,其中,步骤2中采用的距离检测器为压力传感器,采用压力传感器获取滚动距离的具体方法如下:
104.两个第一滚轮103上的多个压力传感器与人体皮肤接触发生压力变化并生成传输至控制板的触发信号数据;
105.控制板依据触发信号数据与每相邻两个压力传感器之间的弧长数据分别计算两个第一滚轮103的滚动距离。
106.上述的一种脊柱侧弯检测方法,其中,步骤3中控制板依据滚动距离与空间角度变化数据计算得到每一个脊柱测量点(测量点)的空间坐标的具体方法为:
107.根据左右两侧第一滚轮103得到的滚动距离取中心位置得到脊柱的空间坐标;
108.如图4所示,空间角度变化数据包含脊柱测量点(测量点)的俯仰角数据、滚转角数据、航向角数据,设第一个测量点为原点,第二个测量点和第一个测量点的航向角数据、俯仰角数据、滚转角数据的相对变化角度值可以通过两个测量点的航向角、俯仰角、滚转角的绝对值相减得到;得到的相对变化角度为一条空间方向线,以第一测量点为球形,两个测量点相对距离为半径作球面,球面和上述空间方向线的交点即为第二测量点;同理以第二测量点为基点可以得到第三、第四
…
各个测量点的空间坐标。
109.综上,本发明的一种脊柱侧弯检测装置及脊柱侧弯检测方法,采用运动传感器、地磁传感器、距离检测器为核心器件安装在手持壳体上,依据手持壳体上的两个第一滚轮与两个第二滚轮在人体背部脊柱上进行移动,实时获取脊柱各个测量点的空间角度变化数
据,通过算法得到脊柱的空间曲线,并计算得到脊柱扭转的角度变化数值,从而得到脊柱侧弯数据,结构简单,便于使用。
110.以上对发明的具体实施例进行了描述。需要理解的是,发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;本领域技术人员可以在权利要求的范围内做出各种变形或修改做出若干简单推演、变形或替换,这并不影响发明的实质内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。