技术特征:
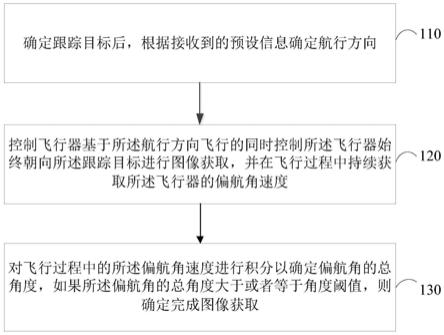
1.一种图像获取方法,其特征在于,包括:确定跟踪目标后,根据接收到的预设信息确定航行方向;控制飞行器基于所述航行方向飞行的同时控制所述飞行器始终朝向所述跟踪目标进行图像获取,并在飞行过程中持续获取所述飞行器的偏航角速度;对飞行过程中的所述偏航角速度进行积分以确定偏航角的总角度,如果所述偏航角的总角度大于或者等于角度阈值,则确定完成图像获取。2.根据权利要求1所述的图像获取方法,其特征在于,确定跟踪目标,包括:确定所述跟踪目标在获取到的初始目标图像中的初始二维坐标;根据所述初始二维坐标确定所述跟踪目标。3.根据权利要求2所述的图像获取方法,其特征在于,控制所述飞行器基于所述航行方向飞行的同时控制所述飞行器始终朝向所述跟踪目标进行图像获取,包括:控制所述飞行器基于所述航行方向飞行并获取下一目标图像,确定所述跟踪目标在所述下一目标图像的下一二维坐标;对所述初始二维坐标和所述下一二维坐标进行三角化测算,确定所述跟踪目标的三维坐标;控制所述飞行器始终朝向所述三维坐标进行图像获取。4.根据权利要求1所述的图像获取方法,其特征在于,确定跟踪目标,包括:根据跟踪目标的三维坐标确定所述跟踪目标;相应地,控制所述飞行器基于所述航行方向飞行的同时控制所述飞行器始终朝向所述跟踪目标进行图像获取,包括:控制所述飞行器基于所述航行方向飞行的同时控制所述飞行器始终朝向所述三维坐标进行图像获取。5.根据权利要求3或4任一所述的图像获取方法,其特征在于,控制所述飞行器始终朝向所述三维坐标进行图像获取,包括:根据所述三维坐标以及所述飞行器的拍摄参数确定所述飞行器的拍摄方向;基于所述拍摄方向和所述航行方向确定所述飞行器基于所述航行方向的偏转角度;基于所述偏转角度控制所述飞行器始终朝向所述三维坐标进行图像获取。6.根据权利要求5所述的图像获取方法,其特征在于,基于所述偏转角度控制所述飞行器始终朝向所述三维坐标进行图像获取,包括:控制所述偏转角度保持在预设角度范围内,以确定所述飞行器始终朝向所述跟踪目标进行图像获取。7.根据权利要求1所述的图像获取方法,其特征在于,所述预设信息包括甩尾方向、最大航行速度和最大纵向速度,相应地,根据接收到的预设信息确定航行方向,包括:根据所述甩尾方向确定所述航行方向;控制所述飞行器基于所述航行方向飞行,包括:控制所述飞行器基于所述航行方向进行爬升飞行,且航行速度小于所述最大航行速度,以及爬升速度小于所述纵向速度。8.一种图像获取装置,其特征在于,包括:方向确定模块,用于确定跟踪目标后,根据接收到的预设信息确定航行方向;控制飞行模块,用于控制飞行器基于所述航行方向飞行的同时控制所述飞行器始终朝
向所述跟踪目标进行图像获取,并在飞行过程中持续获取所述飞行器的偏航角速度;求和模块,用于对飞行过程中的所述偏航角速度进行积分以确定偏航角的总角度,如果所述偏航角的总角度大于或者等于角度阈值,则确定完成图像获取。9.一种飞行器,其特征在于,所述飞行器包括:一个或多个处理器;存储装置,用于存储一个或多个程序;图像获取装置,用于进行图像获取;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1
‑
7中任一所述的图像获取方法。10.一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1
‑
7中任一所述的图像获取方法。
技术总结
本发明公开了一种图像获取方法、装置、飞行器和存储介质,该方法包括:确定跟踪目标后,根据接收到的预设信息确定航行方向;控制飞行器基于航行方向飞行的同时控制飞行器始终朝向跟踪目标进行图像获取,并在飞行过程中持续获取飞行器的偏航角速度;对飞行过程中的偏航角速度进行积分以确定偏航角的总角度,如果偏航角的总角度大于或者等于角度阈值,则确定完成图像获取。上述技术方案,控制飞行器基于确定的航行方向飞行,同时控制飞行器朝向跟踪目标进行图像获取,飞行过程中确定飞行器偏航角的总角度,如果总角度大于角度阈值,则确定完成图像获取,降低操作飞行器的难度,可以及时确定完成图像获取,便于及时停止拍摄,得到较好的航拍效果。好的航拍效果。好的航拍效果。
技术研发人员:张宇程
受保护的技术使用者:深圳市道通智能航空技术股份有限公司
技术研发日:2021.09.10
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。