1.本发明涉及机械设备远程操作技术领域,尤其涉及一种多对多智能远程操作和集控系统。
背景技术:
2.目前的交通运输机械(汽车、坦克、火车等)、工程机械(吊装机械、挖掘机等)、工矿机械(煤炭掘进机等)、农业机械以及工业制造设备等多数机械设备需要操作人员现场操作。在一些特定的工作环境中,对操作人员来说劳动强度高、危险系数大,甚至伤亡机率比较大。如能够在一些比较危险的工作环境中对机械设备进行远程操作,可以减少对操作人员的劳动强度和危险系数,提高工作效率。
3.现有技术中,远程操作及集控系统在矿山机械、煤机设备、起重机设备等领域被广泛地使用,然而,目前存在的远程操作及集控系统中大多以一对一远程控制或一对多远程控制为主,随着智能化程度的提高,尤其是在港口机械以及钢厂等领域,需要采用多对多的远程控制方式,现有的应用场景中,被控制的设备和控制台之间需要手动切换,无法通过系统实现实时切换操作台与行车的绑定控制,增加了工作人员的劳动强度,同时也容易在切换中出现失误,进而带来不需要的损失。
技术实现要素:
4.为解决上述现有技术中存在的部分或全部技术问题,本发明提供一种多对多智能远程操作和集控系统。
5.本发明的技术方案如下:
6.一种多对多智能远程操作和集控系统,其特征在于,包括:
7.智能行车系统,所述智能行车系统包括至少两个行车设备;
8.远程操作站,所述远程操作站包括交换机、远程服务器和至少两个远程操作台,所述行车设备、所述远程服务器和所述远程操作台均能够与所述交换机信号连接;
9.其中,所述远程服务器配置为:当所述交换机连接到其中一个所述行车设备时,所述远程服务器能够将连接的所述行车设备分配至其中一个所述远程操作台,以使得用户能够通过当前连接的所述远程操作台直接控制连接的所述行车设备。
10.可选地,所述行车设备和所述远程操作台均配置有各自的ip地址,所述远程服务器能够将所述行车设备的ip地址与所述远程操作台的ip地址进行绑定和切换。
11.可选地,所述行车设备配置有摄像头,所述摄像头能够跟随所述行车设备连接至所述交换机。
12.可选地,所述远程操作台设置有控制命令接收按钮,所述控制命令接收按钮用于控制当前的所述远程操作台是否执行控制所述当前连接的所述行车设备的控制任务。
13.可选地,所述远程操作台配置有按钮、手柄、指示灯,所述按钮、所述手柄和所述指示灯的信号通过嵌入式芯片被采集。
14.本发明技术方案的主要优点如下:
15.本发明的多对多智能远程操作和集控系统包括智能行车系统和远程操作站,智能行车系统包括行车设备,行车设备可以设置在施工现场,远程操作站包括交换机、远程服务器和至少两个远程操作台,远程操作台可以设置在远离施工现场的远端,通过本发明的系统,可以让任意一个行车设备与任意一个远程操作台相连接,实现了多对多连接,灵活性强。并且,本发明采用分布式控制,当一台操作台或行车离线时,不影响其他操作台和行车工作。同时,本发明通过行车与操作台均进行硬件组态的方式,实现建立连接后,操作台与行车设备的直接控制,保证了连接后控制系统的效率和安全性。与现有技术相比,本发明提供的系统可实现自动切换多对多远程操作,无需手动切换,可以降低工作人员的劳动强度,减少出错的可能性,提高工作效率。
附图说明
16.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
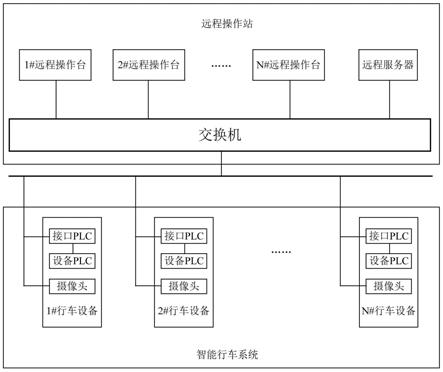
17.图1为根据本发明的一个实施方式中的多对多智能远程操作和集控系统的结构示意图。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.以下结合附图,详细说明本发明实施例提供的技术方案。
20.如图1所示,在根据本发明的一个实施方式中提供了一种多对多智能远程操作和集控系统,该系统能够实现多个远程的操作台控制施工现场的多个行车设备,例如,起重机、煤机等矿山用机械设备,而且该系统能够协同控制车间的信息化系统、视频监控等在内的成套系统。
21.在本实施方式中,多对多智能远程操作和集控系统包括:智能行车系统和远程操作站。
22.如图1所示,智能行车系统包括至少两个行车设备,行车设备可以设置在施工现场。例如,行车设备可以是起重机。优选地,每个行车设备均配置有单独的自动化分系统,行车设备在自动化分系统的控制下能够实现其预先设置的自动化任务。
23.远程操作站包括交换机、远程服务器和至少两个远程操作台。远程操作台根据需求可以设置在远离施工现场的远端。行车设备、远程服务器和远程操作台均能够与交换机信号连接。示例性地,行车设备包括相互连接的接口plc和设备plc,设备plc经由接口plc与交换机连接。
24.在本实施方式中,远程服务器配置为:当所述交换机连接到其中一个所述行车设备时,所述远程服务器能够将连接的所述行车设备分配至其中一个所述远程操作台,以使
得用户能够通过当前连接的所述远程操作台直接控制连接的所述行车设备。
25.具体而言,多台行车设备可以通过一个共同的远程服务器来实现数据交换。远程操作站可以视为行车设备的一个远程控制中心,当没有分配任务或者没有人工介入时,远程操作站不会接管或控制行车设备。当其中一个行车设备连接至远程操作站的交换机时,远程服务器可以将该行车设备连接至相应的远程操作台,也就是可以将该行车设备的控制权分配给工作人员所选的远程操作台,以使得工作人员可以远程操作已连接的行车设备。
26.为了让行车设备和远程操作台之间实现有效地绑定,行车设备和远程操作台均具配置有各自的ip地址。由此,远程服务器能够将行车设备的ip地址与远程操作台的ip地址绑定和切换,从而实现行车设备和远程操作台之间的绑定和切换,以便于实现行车设备和远程操作台之间的信号传递。
27.在本实施方式中,远程服务器可以通过ip地址之间的配对和绑定让行车设备和远程操作台连接起来,而且,相互连接之后的行车设备和远程操作台之间可以直接进行控制信号的传递,相关的控制信号不再通过远程服务器。
28.可以理解,远程服务器负责将行车设备和远程操作台连接起来,之后行车设备和远程操作台之间直接信号传递,由此,可以保证信号传递的效率和安全。
29.优选地,行车设备配置有摄像头,摄像头能够跟随行车设备连接至远程操作台。
30.在本实施方式中,为了有效地获取行车设备所处的环境,摄像头可以实时地拍摄行车设备当前的工作环境,并能够将拍摄的图像传输至远程操作台,以使得工作人员及时地获知行车设备现场的视频画面,以便于进行操作。
31.优选地,在远程操作台控制行车设备的过程中,控制信号和视频流等其他信息分开传输,以便于进一步地确保传输的效率和安全。
32.此外,为了保证安全,远程操作台设置有控制命令接收按钮,控制命令接收按钮用于控制当前的远程操作台是否执行控制当前连接的远程操作台的控制任务。
33.例如,远程操作台与行车设备连接之后,当确定该远程操作台需要执行控制当前连接的行车设备的控制任务时,可以按动该控制命令接收按钮,以使得远程操作台可以控制当前连接的行车设备。
34.作为一种实现方式,在本实施方式中,远程操作台配置有按钮、手柄、指示灯等,按钮、手柄和指示灯等的信号通过嵌入式芯片被采集。
35.在一个具体的实施例中,当行车设备需要连接至远程操作台时:
36.远程服务器可以提前部署远程操作系统。在远程操作系统中,可以对行车设备、摄像头、远程操作台进行ip地址的配置。由此,当行车设备和远程操作台连接后,可以采取ip地址绑定的方式使得行车设备、摄像头和远程操作台连接起来,并且可以根据需求及时切换。作为一种实现方式,当远程操作台与行车设备连接后,远程服务器的客户端界面上可以显示有所连接的行车设备(例如2#行车设备),并配置行车参数。
37.远程操作站的远程操作台设置有表示连接行车设备的s1按钮灯,当远程操作控制站可以连接行车设备时,s1按钮灯处于闪烁状态,当确认连接行车设备时,按下s1按钮灯,之后,远程操作台就可以与行车设备实现连接。此时,行车设备及相应的摄像头与远程操作台的ip地址相互绑定。作为一种实现方式,s1按钮灯闪烁时,说明行车设备可以接受控制命令,按下按钮后,s1按钮灯可以变成绿色常亮时,此时表示行车设备和远程控制台连接成
功,远程控制台进入观察模式。
38.远程操作站的远程操作台还设置有表示能够控制行车设备的s2按钮灯(即控制命令接收按钮),在观察模式下(s1按钮灯常亮),按下该s2按钮灯,绿色闪烁表示行车接受远程控制命令,绿灯常亮表示已经与行车建立连接,操作台进入操作模式。在操作模式下(s1/s2常亮),按下该s2按钮灯,s2按钮灯闪烁表示行车接受远程解除控制命令,绿灯熄灭表示已经与行车连接临时释放,远程操作台重新进入观察模式。
39.本发明的多对多智能远程操作和集控系统具有以下优点:
40.本发明的多对多智能远程操作和集控系统包括智能行车系统和远程操作站,智能行车系统包括行车设备,行车设备可以设置在施工现场,远程操作站包括交换机、远程服务器和至少两个远程操作台,远程操作台可以设置在远离施工现场的远端,通过本发明的系统,可以让任意一个行车设备与任意一个远程操作台相连接,实现了多对多连接,灵活性强。并且,本发明采用分布式控制,当一台操作台或行车离线时,不影响其他操作台和行车工作。同时,本发明通过行车与操作台均进行硬件组态的方式,实现建立连接后,操作台与行车设备的直接控制,保证了连接后控制系统的效率和安全性。与现有技术相比,本发明提供的系统可实现自动切换多对多远程操作,无需手动切换,可以降低工作人员的劳动强度,减少出错的可能性,提高工作效率。
41.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。此外,本文中“前”、“后”、“左”、“右”、“上”、“下”均以附图中表示的放置状态为参照。
42.最后应说明的是:以上实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

