1.本发明属于无人船设备技术领域,具体为一种用于海上风电场的无人船巡检装置及其方法。
背景技术:
2.海上风电场多指水深10米左右的近海风电,与陆上风电场相比,海上风电场的优点主要是不占用土地资源,基本不受地形地貌影响,风速更高,风能资源更丰富,风电机组单机容量更大,年利用小时数更高,但是,海上风电场建设的技术难度也较大,建设成本一般也较高,建造完成后需要对进行海上风电场进行巡检,用于维护海上风电场。
3.在对海上风电场及进行巡检时,需要使用无人船进行辅助巡检,现有的用于海上风电场的无人船巡检装置在实际使用中其摄像头固定在某一位置,通过同名罩进行拍摄巡检,由于长时间使用无人船巡检,通明罩上容易脏污,同时由于无人船巡检装置在海上巡检,容易产生晃动,从而导致摄像头晃动,从而使摄像头拍摄效果不佳,并且由于无人船晃动通导致其内部器件晃动从而受到损伤,导致内部器件的使用寿命降低。
技术实现要素:
4.本发明的目的在于:通过固定电机转动从而带动固定齿轮转动,通过齿带的啮合,可以带动另外一个固定齿轮转动,固定齿轮转动可以带动固定杆转动,同时固定杆转动带动清洁杆转动,清洁杆转动可以带动空心管转动,空心管转动可以使安装齿轮转动,安装齿轮可以带动转动齿轮转动,此时清洁杆在透明罩上转动清洁,同时水泵将无人船本体内储存的水通过传输管传输,再通过水泵和连接管进入到空心管中,水再通过空心管和清洁杆从出水口中喷到透明罩上,可以对透明罩进行清洁,同时通过支撑杆、固定环和固定底座之间的配合,可以增加摄像头的稳定性,避免摄像头大幅度摆动和透明罩脏污,影响拍摄效果,通过连接杆在固定筒内滑动,同时连接杆挤压固定弹簧,固定弹簧压缩,同时透气板移动挤连接件,连接件之间的角度发生变化,带动安装杆移动,此时安装杆在连接筒滑动,安装杆移动对安装弹簧进行挤压,同时安装弹簧和固定弹簧快速回弹,使透气板快速恢复原状,增加内部器件稳定性,通过透气板实现透气,通过风扇转动加快空气流通速度,风从透风孔中出来对无人船本体内部进行干燥处理。
5.本发明采用的技术方案如下:一种用于海上风电场的无人船巡检装置及其方法,包括:
6.无人船本体;
7.稳定机构,所述稳定机构包括透明罩、摄像头和支撑部件,所述透明罩固定连接于无人船本体的顶部,所述支撑部件设置于透明罩内,且支撑部件设置于无人船本体的顶部,所述摄像头设置于支撑部件上;
8.清洁机构,所述清洁机构包括动力部件、转动部件、传输部件、清洁杆和多个出水口,所述动力部件、转动部件和传输部件均设置于无人船本体上,所述传输部件和转动部件
分别设置于动力部件上,所述清洁杆设置于动力部件上,多个所述出水口均开设于清洁杆的一侧外表面;以及
9.固定机构,所述固定机构包括透气板、四组减震部件、两组连接部件和安装板,所述透气板的外表面滑动嵌设于无人船本体的内壁之间,所述安装板固定连接于无人船本体的内壁之间,每组所述减震部件和连接部件分别设置于透气板与安装板之间。
10.其中,所述支撑部件包括支撑杆、固定环和固定底座,所述支撑杆的顶端固定连接于摄像头的底部,所述固定底座的底部固定连接于无人船本体的顶部,所述固定环的两侧外壁均与固定底座的两侧转动连接,所述固定环的两侧内壁分别与支撑杆的外表面转动连接。
11.其中,所述动力部件包括固定电机、两个固定齿轮、空心管和固定杆,所述固定杆与空心管的外表面均分别与清洁杆的两端固定连接,且固定杆与空心管分别与无人船本体转动连接,所述固定电机与无人船本体固定连接,两个所述固定齿轮分别固定套设于固定电机的输出端与固定杆的外表面,两个所述固定齿轮之间通过齿带相传动。
12.其中,所述转动部件包括安装齿轮和转动齿轮,所述转动齿轮与无人船本体转动连接,所安装齿轮固定套设于空心管的一侧外表面,且安装齿轮与转动齿轮相互啮合。
13.其中,所述传输部件包括水泵、连接管和传输管,所述水泵与无人船本体固定连接,所述连接管的一端固定连接于水泵的出水端,且连接管的另一端与空心管的一端转动连接,所述传输管的一端与水泵的进水端固定连接,且传输管的另一端与无人船本体连通连接。
14.其中,每组所述减震部件包括连接杆、固定筒和固定弹簧,所述连接杆固定连接于透气板的底部,所述固定筒固定连接于安装板的顶部,所述连接杆的外表面靠近底部处滑动嵌设于固定筒的内壁之间,所述固定弹簧固定连接于连接杆与固定筒之间。
15.其中,每个所述固定筒的上内壁均固定连接有风扇,且每个所述固定筒的外表面靠近底部均开设置有多个透风孔。
16.其中,每组所述连接部件包括连接筒、两个连接件和两个安装杆,两个所述连接件的顶部与透气板的底部固定连接,且两个连接件的底部与安装板的顶部固定连接,两个所述安装杆分别固定连接于两个连接件相互靠近的一侧,所述连接筒分别滑动套设于两个安装杆的外表面。
17.其中,两个所述安装杆相互靠近的一端之间均固定连接有安装弹簧。
18.一种用于海上风电场的无人船巡检装置的使用方法,包括以下步骤:
19.步骤一、减小振动:透气板上固定上器件,当无人船本体晃动时,此时连接杆在固定筒内滑动,同时连接杆挤压固定弹簧,固定弹簧压缩,同时透气板移动挤连接件,连接件之间的角度发生变化,带动安装杆移动,此时安装杆在连接筒滑动,安装杆移动对安装弹簧进行挤压,同时安装弹簧和固定弹簧快速回弹,使透气板快速恢复原状;
20.步骤二、稳定巡视:当摄像头受到振动时,通过支撑杆、固定环和固定底座之间的配合,可以增加摄像头的稳定性,避免摄像头大幅度摆动,影响拍摄效果;
21.步骤三、清洁功能:通过固定电机转动从而带动固定齿轮转动,通过齿带的啮合,可以带动另外一个固定齿轮转动,固定齿轮转动可以带动固定杆转动,同时固定杆转动带动清洁杆转动,清洁杆转动可以带动空心管转动,空心管转动可以使安装齿轮转动,安装齿
轮可以带动转动齿轮转动,此时清洁杆在透明罩上转动清洁,同时水泵将无人船本体内储存的水通过传输管传输,再通过水泵和连接管进入到空心管中,水再通过空心管和清洁杆从出水口中喷到透明罩上,可以对透明罩进行清洁;
22.步骤四、干燥处理,由于无人船本体长期处于潮湿环境中,通过透气板实现透气,通过风扇转动加快空气流通速度,风从透风孔中出来对无人船本体内部进行干燥处理。
23.综上所述,由于采用了上述技术方案,本发明的有益效果是:
24.(1)本发明中,通过固定电机转动从而带动固定齿轮转动,通过齿带的啮合,可以带动另外一个固定齿轮转动,固定齿轮转动可以带动固定杆转动,同时固定杆转动带动清洁杆转动,清洁杆转动可以带动空心管转动,空心管转动可以使安装齿轮转动,安装齿轮可以带动转动齿轮转动,此时清洁杆在透明罩上转动清洁,同时水泵将无人船本体内储存的水通过传输管传输,再通过水泵和连接管进入到空心管中,水再通过空心管和清洁杆从出水口中喷到透明罩上,可以对透明罩进行清洁,同时通过支撑杆、固定环和固定底座之间的配合,可以增加摄像头的稳定性,避免摄像头大幅度摆动和透明罩脏污,影响拍摄效果。
25.(2)本发明中,通过连接杆在固定筒内滑动,同时连接杆挤压固定弹簧,固定弹簧压缩,同时透气板移动挤连接件,连接件之间的角度发生变化,带动安装杆移动,此时安装杆在连接筒滑动,安装杆移动对安装弹簧进行挤压,同时安装弹簧和固定弹簧快速回弹,使透气板快速恢复原状,增加内部器件稳定性。
26.(3)本发明中,通过透气板实现透气,通过风扇转动加快空气流通速度,风从透风孔中出来对无人船本体内部进行干燥处理。
附图说明
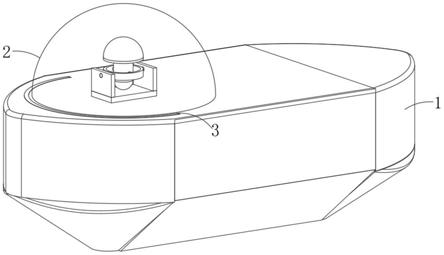
27.图1为本发明的正视立体图;
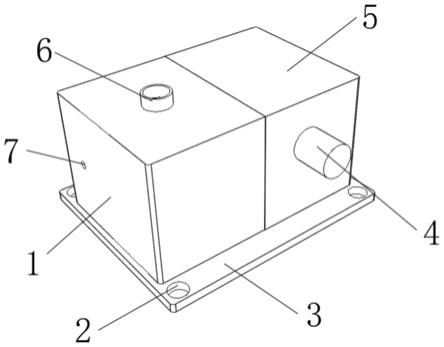
28.图2为本发明的俯视立体图;
29.图3为本发明的正视立体半剖图;
30.图4为本发明的固定机构正视立体部分剖视;
31.图5为本发明的正视立体部分剖视图;
32.图6为本发明的侧视立体部分剖视图;
33.图7为本发明的侧视立体半剖图;
34.图8为本发明的稳定机构和清洁机构爆炸图;
35.图9为本发明的固定机构爆炸图。
36.图中标记:1、无人船本体;2、稳定机构;201、透明罩;202、摄像头;203、支撑杆;204、固定环;205、固定底座;3、清洁机构;301、清洁杆;302、固定杆;303、固定齿轮;304、出水口;305、固定电机;306、连接管;307、安装齿轮;308、转动齿轮;309、水泵;310、传输管;311、空心管;4、固定机构;401、透气板;402、连接杆;403、固定筒;404、固定弹簧;405、风扇;406、连接筒;407、连接件;408、安装杆;409、安装弹簧;410、安装板;411、透风孔。
具体实施方式
37.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不
用于限定本发明。
38.实施例一,参照图1
‑
9:一种用于海上风电场的无人船巡检装置及其方法,包括:无人船本体1;无人船本体1的设置用于巡检,稳定机构2,稳定机构2包括透明罩201、摄像头202和支撑部件,透明罩201固定连接于无人船本体1的顶部,支撑部件设置于透明罩201内,且支撑部件设置于无人船本体1的顶部,摄像头202设置于支撑部件上;稳定机构2的设置用于减少无人船本体1的内部器件的损伤,透明罩201的设置可以便于摄像头202的拍摄和巡视,摄像头202的结构及原理属于现有技术,这里不做详细介绍,其型号可根据实际使用情况进行选择,支撑部件的设置可以增加摄像头202的稳定性,同时支撑部件的设置可以对摄像头202进行支撑,清洁机构3,清洁机构3包括动力部件、转动部件、传输部件、清洁杆301和多个出水口304,动力部件、转动部件和传输部件均设置于无人船本体1上,传输部件和转动部件分别设置于动力部件上,清洁杆301设置于动力部件上,多个出水口304均开设于清洁杆301的一侧外表面;清洁部件的设置可以对透明罩201进行清洁,从而保持摄像头202的拍摄巡视效果,清洁杆301的设置用于清洁,出水口304的设置用于对出水,以及,固定机构4,固定机构4包括透气板401、四组减震部件、两组连接部件和安装板410,透气板401的外表面滑动嵌设于无人船本体1的内壁之间,安装板410固定连接于无人船本体1的内壁之间,每组减震部件和连接部件分别设置于透气板401与安装板410之间,固定机构4的设置用于减少无人船本体1内部器件的损伤,透气板401的上表面开设有多个气孔,用于安装内部器件,同时增加透气板401的透气性,无人船本体1的内部开设有固定空腔,通过安装板410使固定空腔分为上空腔和下空腔,下空腔用于储存水,减震部件和连接部件的设置用于减少透气板401上的器件振动,支撑部件包括支撑杆203、固定环204和固定底座205,支撑杆203的顶端固定连接于摄像头202的底部,固定底座205的底部固定连接于无人船本体1的顶部,固定环204的两侧外壁均与固定底座205的两侧转动连接,固定环204的两侧内壁分别与支撑杆203的外表面转动连接,支撑部件位于透明罩201得到内部,通过支撑杆203、固定环204和固定底座205相互配合,在摄像头202受到振动时,可以减少摄像头202晃动,增加摄像头202的稳定性,动力部件包括固定电机305、两个固定齿轮303、空心管311和固定杆302,固定杆302与空心管311的外表面均分别与清洁杆301的两端固定连接,且固定杆302与空心管311分别与无人船本体1转动连接,固定电机305与无人船本体1固定连接,两个固定齿轮303分别固定套设于固定电机305的输出端与固定杆302的外表面,两个固定齿轮303之间通过齿带相传动,固定电机305的设置用于提供转动力,且固定电机305的结构及原理属于现有技术,这里不做详细介绍,其型号可根据实际使用情况进行选择,固定齿轮303的设置用于传动,空心管311和固定杆302的设置用于固定和安装,空心管311的设置还可以用于传输水,通过固定电机305转动可以带动固定齿轮303转动,从而带动固定杆302转动,固定杆302转动可以带动清洁杆301和空心管311转动,转动部件包括安装齿轮307和转动齿轮308,转动齿轮308与无人船本体1转动连接,所安装齿轮307固定套设于空心管311的一侧外表面,且安装齿轮307与转动齿轮308相互啮合,安装齿轮307和转动齿轮308的配合可以增加清洁杆301移动时的稳定性,同时也可以是实现对清洁杆301的固定,传输部件包括水泵309、连接管306和传输管310,水泵309与无人船本体1固定连接,连接管306的一端固定连接于水泵309的出水端,且连接管306的另一端与空心管311的一端转动连接,传输管310的一端与水泵309的进水端固定连接,且传输管310的另一端与无人船本体1连通连接,水泵309的设置用于传输
水,水泵309的结构及原理属于现有技术,这里不做详细介绍,其型号可根据实际使用情况进行选择,连接管306和传输管310的设置用于传输水,传输管310与下空腔连接,可以将下空腔中的水进行传输,通过水泵309的传输可以将水传输到清洁杆301内。
39.参照图1
‑
9:每组减震部件包括连接杆402、固定筒403和固定弹簧404,连接杆402固定连接于透气板401的底部,固定筒403固定连接于安装板410的顶部,连接杆402的外表面靠近底部处滑动嵌设于固定筒403的内壁之间,固定弹簧404固定连接于连接杆402与固定筒403之间,每个固定筒403的上内壁均固定连接有风扇405,且每个固定筒403的外表面靠近底部均开设置有多个透风孔411,连接杆402的设置用于连接和固定,固定筒403的设置用于安装和固定连接杆402,连接杆402可以在固定筒403内滑动,固定弹簧404的设置可以使连接杆402快速恢复原状,每组连接部件包括连接筒406、两个连接件407和两个安装杆408,两个连接件407的顶部与透气板401的底部固定连接,且两个连接件407的底部与安装板410的顶部固定连接,两个安装杆408分别固定连接于两个连接件407相互靠近的一侧,连接筒406分别滑动套设于两个安装杆408的外表面,一个连接件407由两个固定件、两个安装件和安装件组成,两个安装件的一端分别与两个固定件转动连接,两个安装件的另一端均与安装件转动连接,安装杆408与安装件的一侧固定连接,一个固定件与透气板401固定连接,另一个固定件与安装板410固定连接,连接筒406的设置有用于安装安装杆408,安装杆408可以在连接筒406内滑动,两个安装杆408相互靠近的一端之间均固定连接有安装弹簧409,安装弹簧409位于连接筒406的内部,通过安装弹簧409的设置可以使安装杆408快速恢复原状从而达到稳定的效果。
40.使用时,步骤一、减小振动:透气板401上固定上器件,当无人船本体1晃动时,此时连接杆402在固定筒403内滑动,同时连接杆402挤压固定弹簧404,固定弹簧404压缩,同时透气板401移动挤连接件407,连接件407之间的角度发生变化,带动安装杆408移动,此时安装杆408在连接筒406滑动,安装杆408移动对安装弹簧409进行挤压,同时安装弹簧409和固定弹簧404快速回弹,使透气板401快速恢复原状;步骤二、稳定巡视:当摄像头202受到振动时,通过支撑杆203、固定环204和固定底座205之间的配合,可以增加摄像头202的稳定性,避免摄像头202大幅度摆动,影响拍摄效果;步骤三、清洁功能:通过固定电机305转动从而带动固定齿轮303转动,通过齿带的啮合,可以带动另外一个固定齿轮303转动,固定齿轮303转动可以带动固定杆302转动,同时固定杆302转动带动清洁杆301转动,清洁杆301转动可以带动空心管311转动,空心管311转动可以使安装齿轮307转动,安装齿轮307可以带动转动齿轮308转动,此时清洁杆301在透明罩201上转动清洁,同时水泵309将无人船本体1内储存的水通过传输管310传输,再通过水泵309和连接管306进入到空心管311中,水再通过空心管311和清洁杆301从出水口304中喷到透明罩201上,可以对透明罩201进行清洁;步骤四、干燥处理,由于无人船本体1长期处于潮湿环境中,通过透气板401实现透气,通过风扇405转动加快空气流通速度,风冲透风孔411中出来对无人船本体1内部进行干燥处理。
41.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。