1.本发明涉及船舶监控系统技术领域,尤其涉及一种船舶超载监控系统。
背景技术:
2.船舶运输是使用船舶通过水路运送旅客或货物的一种运输方式,船舶运输主要承担大数量、长距离的运输,是在干线运输中起主力作用的运输形式,在内河及沿海,船舶也常常作为小型运输工具使用,担任补充及衔接大批量干线运输的任务,已经成为经济发展中不可或缺的重要运输方式。部分船东为了提高单程运输的利润,在船舶上放置了超出额定承载的货物,导致船舶吃水变深,在不适航的情况下进行船舶运输作业,很可能导致船舶搁浅、沉没等安全事故的发生,且海事调查中一旦发现船舶超载,也很有可能导致保险公司拒绝赔付。目前对于船舶超载的检查通常是依靠人工进行,极为依赖船东的自觉性和安全意识,缺少有效的技术手段对海域或航线中的船舶超载现象进行实时监控。
技术实现要素:
3.鉴于此,本发明的目的在于提供一种船舶超载监控系统,以克服或至少部分解决现有技术所存在的上述问题。
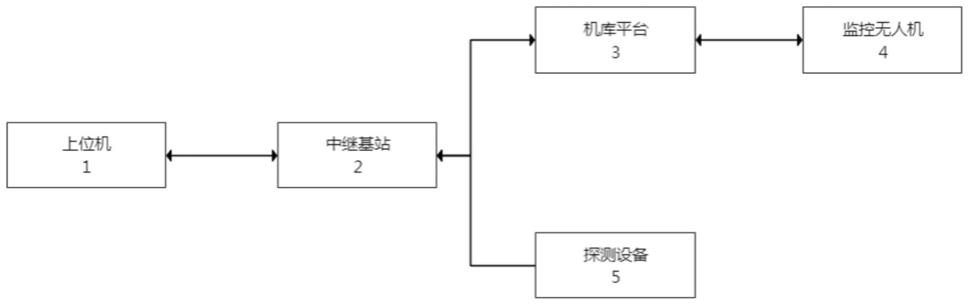
4.一种船舶超载监控系统,包括上位机、中继基站、机库平台、监控无人机和探测设备,所述上位机与中继基站通过网络进行数据交互,所述机库平台、探测设备分别与中继基站信号相连,所述监控无人机与机库平台信号相连,
5.所述上位机用于通过探测设备探测机库平台附近是否有船舶经过,在探测到机库平台附近有船舶经过时控制机库平台放出监控无人机跟随船舶,所述被跟随船舶称为目标船舶,基于监控无人机所传回数据判断目标船舶是否超载;
6.所述中继基站用于实现上位机与机库平台、探测设备之间的数据通信;
7.所述机库平台用于收纳监控无人机、实现上位机与监控无人机之间的数据通信;
8.所述监控无人机用于根据上位机的控制指令跟随目标船舶并采集目标船舶信息数据。
9.进一步的,所述机库平台包括一壳体,所述壳体中设置有收纳舱和设备舱,所述收纳舱用于收纳监控无人机,壳体顶部设置有与收纳舱相连通的电动舱门,收纳舱内设置有停机台,所述停机台底部设置有用于驱动停机台升降的驱动机构,所述设备舱内设置有控制主板、通讯模块和电源,所述电动舱门、驱动机构、通讯模块分别与控制主板信号相连,所述电源分别与电动舱门、驱动机构、控制主板电连接,所述通讯模块分别与监控无人机、中继基站信号相连。
10.进一步的,所述停机台上还设置有无线充电模块和固定机构,所述无线充电模块与电源电连接,用于为监控无人机进行无线充电;所述固定机构用于固定监控无人机。
11.进一步的,所述机库平台还包括升降机构和浸水传感器,所述升降机构包括底座,所述底座上固定设置有直线电机,所述直线电机的动子与壳体底部相连接,用于驱动壳体
升降,所述直线电机与控制主板信号相连,底座上还设置有若干根液压杆,所述液压杆的上端与壳体底部相连接,下端与底座相连接,所述浸水传感器用于检测电动舱门处是否浸水,且浸水传感器与控制主板信号相连。
12.进一步的,所述壳体侧面还设置有推进机构,所述推进机构包括正反转电机、环形卡箍和推进器,所述正反转电机设置于壳体侧面,正反转电机的转子与环形卡箍外侧面固定连接,所述推进器固定设置于环形卡箍中,所述正反转电机、推进器分别与控制主板信号相连。
13.进一步的,所述监控无人机包括无人机本体,所述无人机本体上设置有飞控系统、信号收发模块、摄像头和测距传感器,所述飞控系统、摄像头、测距传感器分别与信号收发模块信号相连,所述信号收发模块与机库平台信号相连。
14.进一步的,所述上位机包括:
15.触发模块,用于接收探测设备所传回的数据,根据探测设备所传回数据判断机库平台附近是否有船舶经过,在判断有船舶经过时触发第一控制模块;
16.第一控制模块,用于在被触发时控制机库平台放出监控无人机,控制机库平台的运行;
17.第二控制模块,用于控制监控无人机,获取监控无人机所传回数据;
18.数据处理模块,用于基于监控无人机所传回数据进行分析获得目标船舶船型信息,结合目标船舶船型信息分析判断目标船舶是否超载;
19.告警模块,用于在目标船舶超载时进行告警。
20.进一步的,所述监控无人机所传回数据包括目标船舶图像和测距传感器所采集的测距数据,所述测距数据至少包括监控无人机悬停于目标船舶上方固定高度时采集的监控无人机与目标船舶最上层甲板之间的距离信息和监控无人机与水面之间的距离信息。
21.与现有技术相比,本发明的有益效果是:
22.本发明所提供的一种船舶超载监控系统,通过将带有监控无人机的机库平台、探测设备部署于海域或航线中,当探测设备探测到机库平台附近有船舶经过时,上位机控制机库平台放出监控无人机,控制监控无人机跟随船舶并采集目标船舶信息数据,根据监控无人机传回的数据分析判断目标船舶是否超载,从而实现对指定区域内船舶超载的远程实时监控,有助于维护航道安全,使船舶运输作业更加规范化。
附图说明
23.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1是本发明一实施例提供的一种船舶超载监控系统整体结构示意图。
25.图2是本发明一实施例提供的机库平台整体结构示意图。
26.图3是本发明一实施例提供的控制主板电路原理示意图。
27.图4是本发明另一实施例提供的机库平台整体结构示意图。
28.图5是本发明一实施例提供的上位机整体结构示意图。
29.图中,1上位机,101触发模块,102第一控制模块,103第二控制模块,104数据处理模块,105告警模块,2中继基站,3机库平台,301壳体,302收纳舱,303设备舱,304电动舱门,305停机台,306驱动机构,307控制主板,308通讯模块,309电源,310无线充电模块,311固定机构,4监控无人机,5探测设备,6升降机构,601底座,602直线电机,603液压杆,701正反转电机,702环形卡箍,703推进器,8浸水传感器。
具体实施方式
30.以下结合附图对本发明的原理和特征进行描述,所列举实施例只用于解释本发明,并非用于限定本发明的范围。
31.参照图1,本实施例提供一种船舶超载监控系统,所述系统包括上位机1、中继基站2、机库平台3、监控无人机4和探测设备5。所述上位机1与中继基站2通过网络进行数据交互,所述网络可以是有线网络也可以是无线网络。所述机库平台3、探测设备5分别与中继基站2信号相连,使得机库平台3、探测设备5可以通过中继基站2实现与上位机1的数据交互。所述监控无人机4与机库平台3信号相连。
32.所述上位机1用于通过探测设备5探测机库平台3附近是否有船舶经过,在探测到机库平台3附近有船舶经过时控制机库平台放出监控无人机4跟随船舶,所述被跟随船舶称为目标船舶,基于监控无人机4所传回数据判断目标船舶是否超载。
33.所述中继基站2用于实现上位机1与机库平台3、探测设备5之间的数据通信。
34.所述机库平台3用于收纳监控无人机4,实现上位机1与监控无人机4之间的数据通信。
35.所述监控无人机4用于根据上位机1的控制指令跟随目标船舶并采集目标船舶信息数据。
36.本实施例所提供的船舶超载监控系统中,可以将带有监控无人机4的机库平台3和探测设备5部署于岸边、水域、航线中,当探测设备5探测到周围有船舶出现时,通过中继基站2向上位机1发出信号。上位机1通过探测设备5发现机库平台3周围有船舶出现后,通过中继基站2向机库平台3发出控制指令控制机库平台3放出监控无人机4,控制监控无人机4根据目标船舶以采集目标船舶信息数据,监控无人机4采集目标船舶信息数据后将其通过机库平台3发送至上位机1,上位机1根据监控无人机4传回的目标船舶信息数据分析判断目标船舶是否超载,从而实现对船舶超载的远程实时监控。
37.具体的,参照图2和图3,所述机库平台3包括一壳体301,所述壳体301中设置有收纳舱302和设备舱303,所述收纳舱302用于收纳监控无人机4,同时壳体301顶部设置有与收纳舱302相连通的电动舱门304,收纳舱302内设置有用于停放监控无人机4的停机台305,所述停机台305底部设置有用于驱动停机台305升降的驱动机构306。设备舱303内设置有控制主板307、通讯模块308和电源309,所述电动舱门304、驱动机构306、通讯模块308分别与控制主板307信号相连,所述电源309分别与电动舱门304、驱动机构306、控制主板307电连接,所述通讯模块308分别与监控无人机4、中继基站2信号相连。
38.本实施例中,在探测设备5未探测到船舶时,监控无人机4都停放在收纳舱302内的停机台305上。当探测设备5探测到船舶时,上位机1通过中继基站2向通讯模块308发送控制指令,控制主板307接收到控制指令后,随后控制电动舱门304打开,控制驱动机构306升起
停机台305使停机台305升至电动舱门304处,完成监控无人机4的起飞准备。监控无人机4的起飞准备动作完成后,上位机4通过中继基站2将控制指令发送至通讯模块308,再由通讯模块308将指令转发至监控无人机4,监控无人机4接收到控制指令后起飞并跟随目标船舶执行超载监控任务。监控无人机4起飞后控制主板307控制驱动机构306降下停机台305并控制电动舱门304关闭,以免异物进入收纳舱302内。监控无人机4完成监控任务后返回时,电动舱门304重新打开,驱动机构306升起停机台305以便监控无人机4降落,监控无人机4降落后,停机台305沉入收纳腔302内,电动舱门304关闭,从而完成监控无人机4的收纳。
39.作为一种可选的实施方式,所述停机台305上还设置有无线充电模块310和固定机构311。所述无线充电模块310与电源309电连接,用于为监控无人机4进行无线充电,监控无人机4上相应设置有无线充电接收模块,当监控无人机4停放在停机台305上时,无线充电模块310即可为监控无人机4进行充电,从而保证监控无人机4的续航性能。所述固定机构311可以是设置于停机台305顶部的若干个电磁铁,所述电磁铁与控制主板307信号相连。当监控无人机4停放在停机台305上时,控制主板307控制电磁铁通电,从而吸附监控无人机4底部的金属起落架,起到固定效果。在监控无人机4的起飞准备动作完成后,控制主板307控制电磁铁断电,使得电磁铁不再吸附金属起落架。所述驱动机构306可以采用电动推杆。
40.作为一种可选的实施方式,所述机库平台3还包括升降机构6和浸水传感器8。所述升降机构6包括底座601,所述底座601上固定设置有直线电机602,所述直线电机602的动子与壳体301底部相连接,用于驱动壳体301升降,直线电机602与控制主板307信号相连。底座601上还设置有若干根液压杆603,所述液压杆603的上端与壳体301的底部相连接,下端与底座601相连接,用于起到辅助支撑、减缓下落速度的作用。所述浸水传感器8用于检测电动舱门304处是否浸水,且浸水传感器8与控制主板307信号相连。
41.示例性地,所述机库平台3和升降机构6可以设置于水下。通常情况下,机库平台3隐藏于水下,当上位机1通过探测设备5发现机库平台3附近有船舶经过时,向机库平台3发送放出监控无人机4的控制指令,此时控制主板307控制直线电机602将壳体301升至水面上,并放出监控无人机4。所述浸水传感器8可以是设置于壳体301的侧面,也可以是设置于电动舱门304处,在壳体301上升至水面的过程中,当浸水传感器8检测不到浸水时,控制主板307才会控制电动舱门304开启,防止收纳舱302中灌水。本实施例中机库平台3在待机状态下隐藏于水下,在需要执行船舶超载监控任务时再通过升降机构6将壳体301升起,相较于将机库平台3设置于岸边的方式,能够提高机库平台3的隐蔽性,防止超载船舶刻意避开机库平台3所在位置以躲避监控。
42.在本发明的另一实施例中,参照图4,所述壳体301侧面还设置有推进机构,所述推进机构包括正反转电机701、环形卡箍702和推进器703,所述正反转电机701设置于壳体301侧面,正反转电机701的转子与环形卡箍702外侧面固定连接,所述推进器703固定设置于环形卡箍702中,所述正反转电机701、推进器703分别与控制主板307信号相连。
43.本实施例中,所述机库平台3可以通过推进机构在水下自由移动,在控制主板307的控制下,正反转电机701可以控制环形卡箍702以转子为轴顺时针或逆时针转动任意角度,使得推进器703能够朝向不同方向喷射气体或水流以驱动壳体301运动。根据不同的监控需求,工作人员可以通过上位机1远程向机库平台3发送控制指令,使机库平台3借助推进机构移动到任意水域,扩大监控无人机4的监控范围,从而令机库平台3的部署地点、监控范
围可以根据需求进行调整,既可以满足多样化的监控需求,又能够避免部署地点固定容易被掌握并刻意规避的问题。
44.一些实施方式中,单一的机库平台3、带有升降机构和带有推进机构的机库平台3可以结合使用,例如在港口、码头处设置单一的机库平台3和探测设备5;在航线的起始段和末尾段可以使用带有升降机构的机库平台3配合探测设备5;在沿线均部署有探测设备5的航线中段可以使用带有推进机构的机库平台进行巡查,从而更好地对长距离航线全段的船舶超载情况进行监控。
45.作为一种可选的实施方式,所述探测设备5可以是采用高清摄像头,通过拍摄水域水面图像传回上位机1,由上位机1识别水域水面图像中是否包含船舶来实现对船舶的探测。也可以是采用ais设备,在一定范围内向带有ais收发设备的船舶发送信号,通过船舶应答来发现船舶。
46.作为一种可选的实施方式,所述监控无人机4包括无人机本体,所述无人机本体上设置有飞控系统、信号收发模块、摄像头和测距传感器,所述飞控系统、摄像头、测距传感器分别与信号收发模块信号相连,所述信号收发模块与机库平台信号相连。无人机本体底部设置有金属材质的起落架,以与机库平台3停机台305上的固定机构311配合。
47.同时,参照图5,所述上位机1包括触发模块101、第一控制模块102、第二控制模块103、数据处理模块104和告警模块105。
48.其中,所述触发模块101用于接收探测设备5所传回的数据,根据探测设备5所传回数据判断机库平台3附近是否有船舶经过,在判断有船舶经过时触发第一控制模块102。
49.所述第一控制模块102用于在被触发时控制机库平台3放出监控无人机4,控制机库平台的运行。
50.所述第二控制模块103用于控制监控无人机4,获取监控无人机所传回数据。示例性地,所述对监控无人机4的控制主要是对监控无人机4飞行和摄像头拍摄的控制,第二控制模块103通过与监控无人机4的飞控系统进行数据交互实现对监控无人机4的控制。
51.所述数据处理模块104用于基于监控无人机所传回数据进行分析获得目标船舶船型信息,结合目标船舶船型信息分析判断目标船舶是否超载。
52.示例性地,所述监控无人机4所传回数据包括摄像头所拍摄的目标船舶图像和测距传感器所采集的测距数据。数据处理模块104通过识别比对目标船舶图像与预存于上位机1的各类型船舶图像来确定目标船舶的船型信息,所述船型信息至少包括相应船型的额定载重对应的标准吃水线、该船型船舶的由船底至最上层甲板的高度信息h3。所述测距数据至少包括监控无人机4悬停于目标船舶上方固定高度时采集的监控无人机4本体与目标船舶最上层甲板之间的距离h1和监控无人机4本体与水面之间的距离h2,根据h1和h2之间的差值可以计算出目标船舶最上层甲板与水面间的距离h4,根据h4与h3的差值即可计算出当前目标船舶的实际吃水线,通过比较目标船舶对应船型的额定载重对应的标准吃水线是否低于其实际吃水线,判断目标船舶是否超载。
53.所述告警模块105用于在目标船舶超载时进行告警。示例性地,所述告警包括向工作人员告警和向目标船舶告警。告警模块105在数据处理模块104判断目标船舶超载时,首先向工作人员告警,以便工作人员及时处理;同时根据目标船舶图像,识别目标船舶船身侧面的编号或船名信息,根据目标船舶的编号或船名,与预存于上位机1中的注册在案的船舶
信息进行比对,从而确定目标船舶的联系方式,基于目标船舶的联系方式向目标船舶发出告警信息,提示其尽快寻找港口或码头靠岸处理超载货物。
54.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。