1.本发明涉及建筑测量技术领域,尤其涉及一种多传感器融合式建筑测量机器人及其控制方法。
背景技术:
2.建筑测量仪器存在测不准的问题,通常采用多种传感器进行辅助测量,综合结果以提高测量准确率,随着目标特征提取技术的发展,越来越多、不同维度的目标特征信息被提取出来。面对众多提取的目标特征,如何进行有效融合识别是一个难题。
技术实现要素:
3.本发明提供了一种多传感器融合式建筑测量机器人,能够提取多个传感器的目标测量值,进而提高测量的准确性。
4.本发明提供的技术方案为:
5.一种多传感器融合式建筑测量机器人,包括:
6.测量调整架;
7.测量机构,其可拆卸连接所述测量调整架,所述测量机构包括多个传感器,至少包括测距仪、测量仪、经纬仪、平板仪、水准仪、激光测量仪、速测仪、投影仪、陀螺经纬仪、测图仪和摄影仪中的一种或几种;
8.控制器,其连接所述测量测量调整架,能够自动调整所述测量调整架的位置和高度;
9.换算控制器,其连接所述测量机构,能够获取多个传感器的检测信息,并进行换算后将测量结果输出。
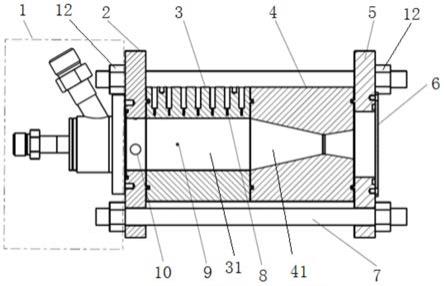
10.优选的是,所述测量调整架包括:
11.垫板;
12.支座,其可滑动设置在所述垫板上;
13.过渡件,其与所述支座活动连接,所述过渡件可沿所述支座的轴向移动;
14.连接件,所述连接件与所述过渡件活动连接,所述连接件可绕所述过度件旋转。
15.优选的是,所述测量机构通过螺栓固定在所述连接件上。
16.本发明还提供了一种多传感器融合式建筑测量机器人控制方法,包括:
17.利用多个传感器采集特征样本,将每个特征样本划分为多个目标类别特征集;
18.根据特征集内的特征量测数据,绘制特征量测图形,并计算所述特征量测曲线的特征权值;
19.根据所述特征权值,对所述特征量测曲线,进行重构得到重构后的特征量测曲线;
20.计算重构后的特征量测曲线的特征权值,进而得到目标测量值。
21.优选的是,所述特征量测曲线的特征权值为:
[0022][0023]
其中,x(λ)
i
为在第i个特征权值,i=1,2,
…
n,n为特征及个数,max(i
i
)为在第i个特征集合中的数据的最大值,min(i
i
)为在第i个特征集合中的数据最小值,m为特征集合内特征值个数,i
i
为第i个特征值。
[0024]
优选的是,所述重构后的特征量测曲线计算公式为:
[0025][0026]
其中,l(λ)为重构后的特征值。
[0027]
优选的是,所述计算重构后的特征量测曲线的特征权值,进而得到目标测量值,包括:
[0028]
根据目标类别特征集内样本特征的平均值,计算每个目标特征集的集间信息熵;
[0029]
并根据所述集间信息熵计算个集与全集距离占比值;
[0030]
根据所述集间信息熵和所述个集与全集距离占比值计算得到集间的平均分集度;
[0031]
根据所述平均分集度合特征量测曲线的特征权值计算得到目标测量值。
[0032]
优选的是,所述集间的平均分集度计算公式为:
[0033][0034]
其中,表示第i个特征对m个集的集间的平均分集度;w
it
表示集间关联度权重,d
it
为第i个特征下m个集的集间信息熵,表示特征i的分集属性,s,z=1,2,
…
,m且s≠z;o
it
表示每个集中心到所有集中心的个集与全集距离占比值,的个集与全集距离占比值,表示所有集的中心,q
ist
表示第s个集对x个样本的第i个特征的平均值,q
izt
表示第z个集对x个样本的第i个特征的平均值。
[0035]
优选的是,所述目标测量值计算公式为
[0036]
r
mea
=φ
it
·
q
it
;
[0037]
其中,r
mea
表示目标测量值;φ
it
表示优选权值,
[0038]
有益效果
[0039]
本发明提供了一种多传感器融合式建筑测量机器人,能够提取多个传感器的目标测量值,进而提高测量的准确性。
附图说明
[0040]
图1为本发明所述的多传感器融合式建筑测量机器人控制方法流程图。
具体实施方式
[0041]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
需要说明的是,在本发明的描述中,术语“中”、“上”、“下”、“横”、“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0043]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0044]
基于背景技术提出的技术问题,本发明提供了一种多传感器融合式建筑测量机器人包括:测量调整架和测量机构,其中,测量机构,其可拆卸连接所述测量调整架,所述测量机构包括多个传感器,至少包括测距仪、测量仪、经纬仪、平板仪、水准仪、激光测量仪、速测仪、投影仪、陀螺经纬仪、测图仪和摄影仪中的一种或几种;控制器,其连接所述测量测量调整架,能够自动调整所述测量调整架的位置和高度;换算控制器,其连接所述测量机构,能够获取多个传感器的检测信息,并进行换算后将测量结果输出。
[0045]
优选的是,测量调整架包括:垫板、支座、过度件和连接件。
[0046]
支座可滑动设置在垫板上;过渡件与所述支座活动连接,所述过渡件可沿所述支座的轴向移动;连接件,所述连接件与所述过渡件活动连接,所述连接件可绕所述过度件旋转。
[0047]
优选的是,测量机构通过螺栓固定在所述连接件上。
[0048]
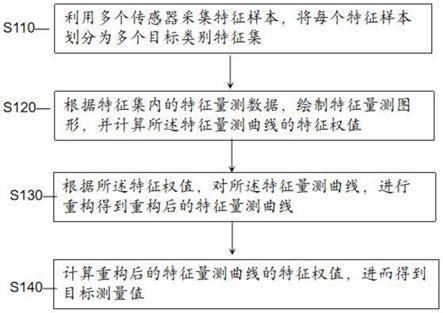
如图1所示,本发明还提供了一种多传感器融合式建筑测量机器人控制方法,包括:
[0049]
步骤s110、利用多个传感器采集特征样本,将每个特征样本划分为多个目标类别特征集;
[0050]
步骤s120、根据特征集内的特征量测数据,绘制特征量测图形,并计算所述特征量测曲线的特征权值;
[0051]
步骤s130、根据所述特征权值,对所述特征量测曲线,进行重构得到重构后的特征量测曲线;
[0052]
步骤s140、计算重构后的特征量测曲线的特征权值,进而得到目标测量值。
[0053]
优选的是,所述特征量测曲线的特征权值为:
[0054][0055]
其中,x(λ)
i
为在第i个特征权值,i=1,2,
…
n,n为特征及个数,max(i
i
)为在第i个特征集合中的数据的最大值,min(i
i
)为在第i个特征集合中的数据最小值,m为特征集合内特征值个数,i
i
为第i个特征值。
[0056]
优选的是,所述重构后的特征量测曲线计算公式为:
[0057][0058]
其中,l(λ)为重构后的特征值。
[0059]
优选的是,所述计算重构后的特征量测曲线的特征权值,进而得到目标测量值,包括:
[0060]
根据目标类别特征集内样本特征的平均值,计算每个目标特征集的集间信息熵;
[0061]
并根据所述集间信息熵计算个集与全集距离占比值;
[0062]
根据所述集间信息熵和所述个集与全集距离占比值计算得到集间的平均分集度;
[0063]
根据所述平均分集度合特征量测曲线的特征权值计算得到目标测量值。
[0064]
优选的是,所述集间的平均分集度计算公式为:
[0065][0066]
其中,表示第i个特征对m个集的集间的平均分集度;w
it
表示集间关联度权重,d
it
为第i个特征下m个集的集间信息熵,表示特征i的分集属性,s,z=1,2,
…
,m且s≠z;o
it
表示每个集中心到所有集中心的个集与全集距离占比值,的个集与全集距离占比值,表示所有集的中心,q
ist
表示第s个集对x个样本的第i个特征的平均值,q
izt
表示第z个集对x个样本的第i个特征的平均值。
[0067]
优选的是,所述目标测量值计算公式为
[0068]
r
mea
=φ
it
gq
it
;
[0069]
其中,r
mea
表示目标测量值;φ
it
表示优选权值,
[0070]
本发明提供了一种多传感器融合式建筑测量机器人,能够提取多个传感器的目标测量值,进而提高测量的准确性。
[0071]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些
更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。