1.本发明涉及走时检测技术领域,尤其涉及一种机器视觉走时检测方法及系统。
背景技术:
2.为自动检测机械表走时的准确性,目前可采用一种机器视觉走时检测系统,该系统通过传统相机获取表盘正面图像后经过计算机处理获得时针、分针、秒针的位置并通过角度计算时间。
3.对于上述技术,存在一下技术缺点:
4.1)由于部分表盘纹理复杂,传统相机所采集的图像容易识别错误,把表盘纹路识别为指针;
5.2)指针与部分表盘颜色重叠时,机器视觉走时检测系统容易受到颜色影响而无法识别到指针;
6.3)识别成功率较低;
7.4)对表款兼容性较低,不同表款需在不同光源下进行识别;
8.5)现有的机器视觉走时检测系统为提高识别成功率,通常会对每个手表进行15次曝光,每次间隔1秒,对15张照片分别进行识别,再通过后期处理,取15次识别结果中出现较多的时间矫正实际走时。该方法解决了因部分手表单次识别错误而导致的误差,然而仍未解决因表盘纹路对指针识别时的影响所导致的错误识别的问题。
技术实现要素:
9.本发明针对上述技术问题,提出了一种机器视觉走时检测方法及系统。
10.本发明提出以下技术方案:
11.本发明提出了一种机器视觉走时检测方法,包括以下步骤:
12.步骤s1、获取待测手表正面的深度图;
13.步骤s2、根据待测手表正面的深度图,识别得到手表指针的轮廓;
14.步骤s3、根据手表指针的轮廓获取手表指针的取向,从而得到手表指示时间。
15.本发明上述的机器视觉走时检测方法中,步骤s1包括:
16.步骤s1.1、使用光场相机拍摄待测手表正面的光场图像;
17.步骤s1.2、根据待测手表正面的光场图像,通过深度算法计算得到待测手表正面的深度图。
18.本发明上述的机器视觉走时检测方法中,深度算法采用多视场角算法。
19.本发明上述的机器视觉走时检测方法中,在步骤s3中,预先设置基准取向位置,检测手表指针的轮廓和基准取向位置之间的夹角,再根据所检测得到的夹角获取手表指针的取向以及对应所指示的时间。
20.本发明还提出了一种机器视觉走时检测系统,包括:
21.深度图获取模块,用于获取待测手表正面的深度图;
22.指针识别模块,用于根据待测手表正面的深度图,识别得到手表指针的轮廓;
23.读时模块,用于根据手表指针的轮廓获取手表指针的取向,从而得到手表指示时间。
24.本发明上述的机器视觉走时检测系统中,深度图获取模块包括:
25.光场相机,用于拍摄待测手表正面的光场图像;
26.深度图计算模块,用于根据待测手表正面的光场图像,通过深度算法计算得到待测手表正面的深度图。
27.本发明上述的机器视觉走时检测系统中,深度算法采用多视场角算法。
28.本发明上述的机器视觉走时检测系统中,读时模块用于预先设置基准取向位置,检测手表指针的轮廓和基准取向位置之间的夹角,再根据所检测得到的夹角获取手表指针的取向以及对应所指示的时间。
29.本发明的机器视觉走时检测方法及系统采用光场相机替代传统相机,根据手表指针和表盘深度不同的特点,实现指针的识别,从而确保对手表走时检测的准确性。
附图说明
30.下面结合附图对本发明进一步说明:
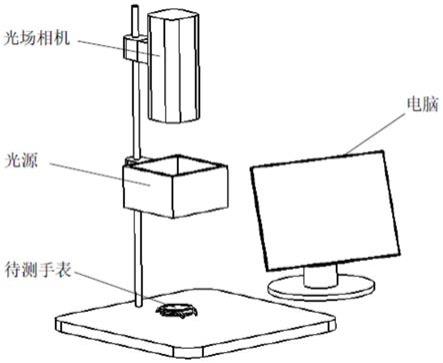
31.图1示出了本发明优选实施例的机器视觉走时检测系统的结构示意图;
32.图2示出了图1所示的机器视觉走时检测系统的功能模块方框图。
具体实施方式
33.本发明所要解决的技术问题是:针对表盘纹理复杂,表盘颜色与指针颜色相同的手表,现有的机器视觉走时检测系统难以甚至无法识别其指针,从而导致无法进行手表的走时检测。本发明就该技术问题而提出的思路是:采用光场相机替代传统相机,根据手表指针和表盘深度不同的特点,实现指针的识别,从而确保对手表走时检测的准确性。
34.为了使得发明的技术方案、技术目的以及技术效果更为清楚,以使得本领域技术人员能够理解和实施本发明,下面将结合附图及具体实施例对本发明做进一步详细的描述。
35.如图1所示,图1示出了本发明优选实施例的机器视觉走时检测系统的结构示意图。基于该机器视觉走时检测系统,本发明提出了一种机器视觉走时检测方法,包括以下步骤:
36.步骤s1、获取待测手表正面的深度图;
37.在3d计算机图形和计算机视觉中,深度图是一种图像或图像通道,其中包含与场景对象的表面到视点的距离有关的信息,用于模拟的3d形状或重建他们。
38.具体地,步骤s1包括:
39.步骤s1.1、使用光场相机拍摄待测手表正面的光场图像;
40.步骤s1.2、根据待测手表正面的光场图像,通过深度算法计算得到待测手表正面的深度图;
41.在这里,光场相机的机身和普通数码相机差不多,但内部结构大有不同。一般相机以主镜头捕捉光线,再聚焦在镜头后的胶片或感光器上,所有光线的总和形成相片上的小
点,显示影像。而在光场相机中,置于主镜头及感光器之间,有一个布满225个微型镜片的显微镜阵列,每个小镜阵列接收由主镜头而来的光线后,传送到感光器前,析出聚焦光线及将光线资料转换,以数码方式记下。相机内置软件操作“已扩大光场”,追踪每条光线在不同距离的影像上的落点,经数码重新对焦后,便能拍出完美照片。
42.而且,光场相机一反传统,减低镜头孔径大小及景深,以小镜阵列控制额外光线,展露每个影像的景深,再将微小的次影像投射到感光器上,所有聚焦影像周围的朦胧光圈变为清晰,保持旧有相机的大孔径所带来的增加光度、减少拍照时间及起粒的情况,不用牺牲景深以及影像清晰度。
43.对于根据光场图像计算深度图,可以有以下方法:
44.1.利用多视场角的方法,根据不同视角下的子孔径图像匹配得出深度图。
45.2.利用重聚焦法,根据不同深度下每一个像素点处的梯度或者纹理的不同,算出最清晰的那张图片对应的深度值就可以得到深度图。
46.在本实施例中,光场相机记录下待测手表的光场信息,通过电脑处理该光场信号,通过计算所有微型镜片下各自获得图片的变化率(多视场角算法),可以获得该待测手表的深度图。
47.深度图根据手表各个部位的零件不同深度,显示出不同颜色,与原物体颜色无关。通过深度图识别指针位置,计算出走时。
48.步骤s2、根据待测手表正面的深度图,识别得到手表指针的轮廓;
49.在这里,由于手表指针和表盘位于不同的高度,所以两者的深度不同。通过这一点,能够将手表指针和表盘进行区分。
50.在本实施例中,手表指针包括秒针、时针和分针,秒针、时针和分针根据各自的长度和/或景深可以实现区分。在其他实施例中,手表指针可以不包括秒针。
51.步骤s3、根据手表指针的轮廓获取手表指针的取向,从而得到手表指示时间。
52.在本步骤中,可以预先设置基准取向位置,例如12点钟方向的取向位置,然后检测手表指针的轮廓和基准取向位置(如12点钟方向的取向位置)之间的夹角,再根据所检测得到的夹角便可以获取手表指针的取向以及对应所指示的时间。
53.如图2所示,图2示出了图1所示的机器视觉走时检测系统的功能模块方框图。本发明提出了一种机器视觉走时检测系统,包括:
54.深度图获取模块100,用于获取待测手表正面的深度图;
55.在3d计算机图形和计算机视觉中,深度图是一种图像或图像通道,其中包含与场景对象的表面到视点的距离有关的信息,用于模拟的3d形状或重建他们。
56.具体地,深度图获取模块100包括:
57.光场相机110,用于拍摄待测手表正面的光场图像;
58.深度图计算模块120,用于根据待测手表正面的光场图像,通过深度算法计算得到待测手表正面的深度图;
59.在这里,光场相机的机身和普通数码相机差不多,但内部结构大有不同。一般相机以主镜头捕捉光线,再聚焦在镜头后的胶片或感光器上,所有光线的总和形成相片上的小点,显示影像。而在光场相机中,置于主镜头及感光器之间,有一个布满225个微型镜片的显微镜阵列,每个小镜阵列接收由主镜头而来的光线后,传送到感光器前,析出聚焦光线及将
光线资料转换,以数码方式记下。相机内置软件操作“已扩大光场”,追踪每条光线在不同距离的影像上的落点,经数码重新对焦后,便能拍出完美照片。
60.而且,光场相机一反传统,减低镜头孔径大小及景深,以小镜阵列控制额外光线,展露每个影像的景深,再将微小的次影像投射到感光器上,所有聚焦影像周围的朦胧光圈变为清晰,保持旧有相机的大孔径所带来的增加光度、减少拍照时间及起粒的情况,不用牺牲景深以及影像清晰度。
61.对于根据光场图像计算深度图,可以有以下方法:
62.1.利用多视场角的方法,根据不同视角下的子孔径图像匹配得出深度图。
63.2.利用重聚焦法,根据不同深度下每一个像素点处的梯度或者纹理的不同,算出最清晰的那张图片对应的深度值就可以得到深度图。
64.在本实施例中,光场相机记录下待测手表的光场信息,通过电脑处理该光场信号,通过计算所有微型镜片下各自获得图片的变化率(多视场角算法),可以获得该待测手表的深度图。
65.深度图根据手表各个部位的零件不同深度,显示出不同颜色,与原物体颜色无关。通过深度图识别指针位置,计算出走时。
66.指针识别模块200,用于根据待测手表正面的深度图,识别得到手表指针的轮廓;
67.在这里,由于手表指针和表盘位于不同的高度,所以两者的深度不同。通过这一点,能够将手表指针和表盘进行区分。
68.在本实施例中,手表指针包括秒针、时针和分针,秒针、时针和分针根据各自的长度和/或景深可以实现区分。在其他实施例中,手表指针可以不包括秒针。
69.读时模块300,用于根据手表指针的轮廓获取手表指针的取向,从而得到手表指示时间。
70.在这里,读时模块300可以预先设置基准取向位置,例如12点钟方向的取向位置,然后检测手表指针和基准取向位置(如12点钟方向的取向位置)之间的夹角,这样,便可以获取手表指针的取向以及对应所指示的时间。
71.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。