1.本发明涉及云台控制领域,尤其是涉及一种路侧智能云台多传感器融合控制方法及设备。
背景技术:
2.目前,路测的云台大多用于视频监控,无需精确控制旋转角度,而现在市场上一般的云台基本不具备角度控制功能,即使带有角度控制,也是通过电机旋转速度估计转动角度,角度控制精度不高,无法满足自动驾驶的要求,为保证云台上传感器数据正确性,云台需保证自身角度的精确控制在0.5度以内,同时还需实时反馈云台上传感器的姿态信息等。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供—种路侧智能云台多传感器融合控制方法及设备。
4.本发明的目的可以通过以下技术方案来实现:
5.一种路侧智能云台多传感器融合控制方法,包括以下步骤:
6.1)云台传感器初始化;
7.2)通过云台顶部安装的惯性测量单元实时检测获取云台的六轴加速度和角速度数据,并对六轴加速度和角速度数据进行卡尔曼滤波积分过滤噪声得到云台的姿态角数据;
8.3)通过安装在云台旋转电机处的角度传感器实时检测云台角度数据,并结合限位开关的检测结果得到云台最终的角度数据;
9.4)将云台的姿态角数据和云台最终的角度数据融合后发送到远程主机,实现云台角度的精确控制。
10.所述的步骤2)中,云台的姿态角数据仅包括翻滚角和俯仰角。
11.所述的步骤4)中,云台角度数据包括水平角和垂直角。
12.所述的惯性测量单元采用六轴惯导。
13.所述的步骤3)具体为:
14.通过角度传感器获取云台的水平角和垂直角后,若云台在运动中触发限位开关,则以限位开关对应的实际安装角度作为云台最终的角度数据,否则以角度传感器检测到的角度作为云台最终的角度数据。
15.所述的步骤4)中,将云台最终的水平角作为云台的转向角结合惯性测量单元检测到的翻滚角和俯仰角数据,作为最终的姿态角数据发送到远程主机,实现云台角度的精确控制。
16.所述的角度传感器包括霍尔编码器、光电编码器和电位器。
17.所述的角度传感器分别安装在云台的俯仰电机和水平电机位置处。
18.所述的限位开关包括机械式开关、电磁开关和光电开关,安装位置根据实际需求
决定。
19.一种检测设备,包括:处理器、存储器以及被存储在存储器中的一个或多个程序,所述的一个或多个程序包括用于执行路侧智能云台多传感器融合检测方法的指令。
20.与现有技术相比,本发明具有以下优点:
21.一、由于现有的云台角度是通过检测电机旋转时间通过与电机转速的乘积得到角度数据,检测时得到的数据不精确,而本发明通过角度传感器直接检测角度,并且配合限位开关,更加精确的获得云台角度数据。
22.二、实时姿态反馈,并且本发明方法适用于一般云台,通过加装传感器即可实现同样功能。
附图说明
23.图1为加装角度传感器和限位开关的云台结构示意图。
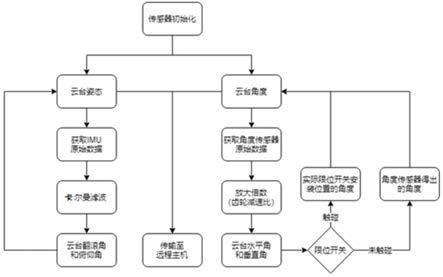
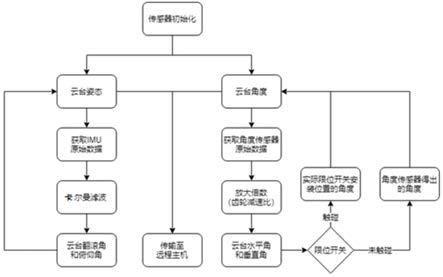
24.图2为本发明的方法流程图。
具体实施方式
25.下面结合附图和具体实施例对本发明进行详细说明。
26.实施例
27.如图1所示,本发明为实现智能云台中多传感器融合检测,在现有的云台顶部安装惯性测量单元(imu),并且在云台水平电机和俯仰电机位置处各安装一个角度传感器,同时在旋转的传动齿轮上装有限位开关。
28.本例中,云台可采用不同结构、不同电机,具体结构可以是两个电机驱动各自旋转齿轮,带动云台旋转,若无需云台姿态,则imu可不安装。
29.角度传感器包括但不限于霍尔编码器、光电编码器、电位器等。
30.限位开关包括但不限于机械式开关、电磁开关、光电开关等,安装位置根据实际需求决定。
31.如图2所示,本发明提供—种路侧智能云台多传感器融合控制方法,用以实现对车路协同网联设备姿态调节智能云台的精确控制和实时姿态反馈,具体流程描述如下:
32.在初始化之后,检测的角度数据分为两部分,分别为姿态数据和角度数据,最终将两部分数据融合得到最终的姿态角数据(包括转向角、翻滚角和俯仰角),传输至远程主机,实现对云台水平电机和俯仰电机的精确控制(精度在0.5度以内)。
33.对于云台姿态,主要依靠惯性测量单元imu(本例中为六轴惯导),首先通过 imu获取六轴加速度和角速度数据,再经过卡尔曼滤波,积分过滤噪声后最终得出云台的姿态角(包括翻滚角和俯仰角)。
34.对于云台角度,主要依靠角度传感器和限位开关,首先通过角度传感器获取角度信息,再乘以放大倍数,得出云台角度,同时还需检测云台在运动中是否碰到限位开关,若碰到,则云台角度应为限位开关实际安装角度,最终得出云台角度(水平角和垂直角)。
35.最终,结合惯性测量单元imu测得的翻滚角和俯仰角以及角度传感器和限位开关测得的作为转向角的水平角后,得到最终的姿态角发送到远程主机完成角度控制。
技术特征:
1.一种路侧智能云台多传感器融合控制方法,其特征在于,包括以下步骤:1)云台传感器初始化;2)通过云台顶部安装的惯性测量单元实时检测获取云台的六轴加速度和角速度数据,并对六轴加速度和角速度数据进行卡尔曼滤波积分过滤噪声得到云台的姿态角数据;3)通过安装在云台旋转电机处的角度传感器实时检测云台角度数据,并结合限位开关的检测结果得到云台最终的角度数据;4)将云台的姿态角数据和云台最终的角度数据融合后发送到远程主机,实现云台角度的精确控制。2.根据权利要求1所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的步骤2)中,云台的姿态角数据仅包括翻滚角和俯仰角。3.根据权利要求1所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的步骤4)中,云台角度数据包括水平角和垂直角。4.根据权利要求1所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的惯性测量单元采用六轴惯导。5.根据权利要求3所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的步骤3)具体为:通过角度传感器获取云台的水平角和垂直角后,若云台在运动中触发限位开关,则以限位开关对应的实际安装角度作为云台最终的角度数据,否则以角度传感器检测到的角度作为云台最终的角度数据。6.根据权利要求5所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的步骤4)中,将云台最终的水平角作为云台的转向角结合惯性测量单元检测到的翻滚角和俯仰角数据,作为最终的姿态角数据发送到远程主机,实现云台角度的精确控制。7.根据权利要求1所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的角度传感器包括霍尔编码器、光电编码器和电位器。8.根据权利要求7所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的角度传感器分别安装在云台的俯仰电机和水平电机位置处。9.根据权利要求1所述的—种路侧智能云台多传感器融合控制方法,其特征在于,所述的限位开关包括机械式开关、电磁开关和光电开关,安装位置根据实际需求决定。10.一种检测设备,其特征在于,包括:处理器、存储器以及被存储在存储器中的一个或多个程序,所述的一个或多个程序包括用于执行如权利要求1
‑
9任一项所述路侧智能云台多传感器融合检测方法的指令。
技术总结
本发明涉及—种路侧智能云台多传感器融合控制方法及设备,该方法包括以下步骤:1)云台传感器初始化;2)通过云台顶部安装的惯性测量单元实时检测获取云台的六轴加速度和角速度数据,并对六轴加速度和角速度数据进行卡尔曼滤波积分过滤噪声得到云台的姿态角数据;3)通过安装在云台旋转电机处的角度传感器实时检测云台角度数据,并结合限位开关的检测结果得到云台最终的角度数据;4)将云台的姿态角数据和云台最终的角度数据融合后发送到远程主机,实现云台角度的精确控制。与现有技术相比,本发明具有云台角度精确控制、实时姿态反馈、改装方便等优点。改装方便等优点。改装方便等优点。
技术研发人员:郭志豪 林新雨 金江 张雷波
受保护的技术使用者:上海智能网联汽车技术中心有限公司
技术研发日:2021.08.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。