1.本发明涉及直线传动结构静刚度计算方法技术领域,尤其是一种滚动直线导轨副静态刚度计算与结构参数设计方法。
背景技术:
2.滚珠直线导轨副是机床进给系统中一种重要部件,具有导向、承载、定位等功能。滚珠直线导轨副静刚度是一项重要的性能指标,既能反映导轨承载能力,又直接影响机床整机动力学性能。因此,研究滚动直线导轨副静态刚度,对于机床设计领域具有重要的科学意义与工程价值。滚动直线导轨副静态刚度计算,是滚珠直线导轨副的设计、选型等必要环节。
3.目前,国内外围绕滚珠直线导轨副静刚度的理论计算方法主要有:(1)不考虑赫兹接触区外变形的刚性计算方法。基于赫兹接触理论,计算滚道在外载荷作用下的变形与导轨副五自由度静态刚度。这种计算方法忽略了赫兹接触区外的弹性变形,计算结果与实验值偏差较大。(2)考虑赫兹接触区外变形的柔性计算方法。基于赫兹接触理论,计算滚道在赫兹接触区内的变形;基于有限元法,计算赫兹接触区外弹性变形。该方法建模繁琐、求解耗时,且依赖于大型的商业软件,且不适用于导轨副角刚度计算。
技术实现要素:
4.针对现有技术的不足,本发明提供一种滚动直线导轨副静态刚度计算与结构参数设计方法,以精确计算滚珠直线导轨副在外力或外力矩作用下的五自由度静态刚度。
5.本发明采用的技术方案如下:
6.一种滚动直线导轨副静态刚度计算与结构参数设计方法,包括以下步骤:
7.步骤s1:提出滚道赫兹接触区外载荷与变形线性化假设,将滚道结合部接触关系简化为等效弹簧模型,基于赫兹点接触理论与有限元法,建立滚珠滚道柔性接触模型:
8.p
ij
=k
cij
δc
ij
=k
hz
δ
ij3/2
=k
rij
δ
rij
9.上式中,p
ij
表示第i列滚道第j个滚珠所受接触力,k
cij
、k
rij
和khz分别表示第i列滚道中j位置处滑块、导轨和滚珠的等效刚度,δ
cij
、δ
rij
和δ
ij
分别表示第i列滚道中j位置处滑块、导轨和滚珠的变形量;
10.根据所述滚珠滚道柔性接触模型得到滚珠滚道接触力与导轨、滚珠、滑块变形的关系;
11.步骤s2:考虑滚珠直线导轨副滚道内滚珠的预紧量,计算每个滚珠处滚道间的初始曲率中心距,采用下式:
12.a0=r
c
r
r
‑
d0,δ0=d
‑
d013.上两式中,a0表示未预紧时每列滚道内滑块与导轨曲率中心之间的初始距离,r
c
和r
r
分别表示滚道内滑块、导轨的曲率半径,d0表示滚珠的公称直径;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量,d表示预紧后滚珠的实际直径;
14.步骤s3:根据步骤s1和步骤s2得到的结果,计算滚珠直线导轨副的垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度;所述垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度的计算过程相同,包括:
15.给定相应载荷,建立滚珠直线导轨副在给定载荷方向的位移与各滚珠滚道结合部的变形协调关系;
16.由步骤s1建立的滚珠滚道柔性接触模型,计算在给定载荷作用下的导轨副各滚珠滚道接触力;
17.建立滚珠直线导轨副的相应载荷下的平衡方程,求解滚珠直线导轨在给定载荷方向的位移,计算得到相应的刚度;
18.步骤s4:将滚珠直线导轨副系统刚度的最大值对应的设计变量取值,确定为设计变量的最佳值,对滚动直线导轨副结构参数设计。
19.其进一步技术方案为:
20.步骤s3中,计算滚珠直线导轨副的垂向刚度,具体包括:
21.给定垂向外载荷,建立滚珠直线导轨副垂向线位移δ
z
与各滚珠滚道结合部的变形协调关系,其表达式为:
22.δ
ij
=a
i
‑
a0 δ0,
[0023][0024][0025]
上三式中,δ
ij
表示通过第i列滚道内第j个滚珠的总赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i列滚道内滑块与导轨实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
j
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
z
表示所述滚珠直线导轨副垂向线位移,即在垂向力作用下滑块相对于导轨产生的垂向线位移;
[0026]
由所述垂向线位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得单排滚道内第j个滚道中的赫兹变形量δ
ij
,以及单排滚道第j个滚珠与滚道间的接触力p
ij
;
[0027]
建立滚珠直线导轨副的垂向力平衡方程:
[0028][0029]
以上三式中,f
z
表示滚珠直线导轨副受到的垂向力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;
[0030]
运用newton
‑
raphson法迭代垂向线位移与各滚珠滚道结合部的变形协调关系关系式、及垂向力平衡方程求解δ
z
,再结合f
z
计算滚动直线导轨副垂向刚度。
[0031]
步骤s3中,计算滚珠直线导轨副的水平刚度,具体包括:
[0032]
给定水平方向外载荷,建立滚珠直线导轨副水平线位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0033]
δ
i
=a
i
‑
a0 δ0,
[0034][0035][0036]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠总的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i列滚道内滑块与导轨的实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道的实际接触角;δc
j
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
y
表示所述滚珠直线导轨副水平线位移,即在水平力作用下滑块相对于导轨产生的水平线位移;
[0037]
由所述水平线位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得单排滚道内第j个滚道中的赫兹变形量δ
ij
、以及单排滚道第j个滚珠与滚道间的接触力p
ij
;
[0038]
建立滚珠直线导轨副的水平力平衡方程:
[0039][0040]
上式中,f
y
表示滚珠直线导轨副受到的水平力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道的实际接触角;
[0041]
运用newton
‑
raphson法迭代水平线位移与各滚珠滚道结合部的变形协调关系式、及水平力平衡方程求解δ
y
,然后结合f
y
计算滚动直线导轨副水平刚度。
[0042]
步骤s3中,计算滚珠直线导轨副的转动角刚度,具体包括:
[0043]
给定转动外力矩,建立滚珠直线导轨副转动角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0044]
δ
ij
=a
i
‑
a0 δ0,
[0045][0046][0047]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;lr表示外载荷作用前滑块曲率中心到原点的距离;表示转动角位移引起的滑块曲率中心位移与水平方向的夹角;a
i
表示外载荷作用下第i列滚道内滑块与导轨曲率中心之间的
距离;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
j
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;θ
x
表示所述滚珠直线导轨副转动角位移,即在转动力矩作用下滑块相对于导轨产生的转动角位移;
[0048]
由所述转动角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得到第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0049]
建立滚珠直线导轨副的转动力矩平衡方程:
[0050][0051]
上式中,m
x
表示滚珠直线导轨副受到的转动力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;l1表示左右两列滚珠中心距的一半;l2表示上下两列滚珠中心距的一半;
[0052]
运用newton
‑
raphson法迭代转动角位移与各滚珠滚道结合部的变形协调关系式,及转动力矩平衡方程求解θ
x
,然后结合m
x
计算滚珠直线导轨副转动角刚度。
[0053]
步骤s3中,计算滚珠直线导轨副的俯仰角刚度,具体包括:
[0054]
给定俯仰外力矩,建立滚珠直线导轨副俯仰角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0055]
δ
ij
=a
ij
‑
a0 δ0,
[0056]
a
ij
={(
‑
l
pij
θ
z
)2 (a
0 cosβ0‑
2δr
j
)2[0057]
(2l
pij tanβ0)2}
1/2
‑
δc
ij
‑
δr
ij
,
[0058][0059]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xz平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;a
ij
表示外载荷作用下第i列滚道第j个滚珠处滑块与导轨曲率中心之间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
y
表示所述滚珠直线导轨副俯仰角位移,即在俯仰力矩作用下滑块相对于导轨产生的俯仰角位移;
[0060]
由所述俯仰角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,计算获得第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0061]
建立滚珠直线导轨副的俯仰力矩平衡方程:
[0062][0063]
上式中:m
y
表示滚珠直线导轨副受到的俯仰力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;ε
1j
、ε
2j
、ε
3j
、ε
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与z轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;
[0064]
运用newton
‑
raphson法迭代俯仰力位移与各滚珠滚道结合部的变形协调关系式、及俯仰力矩平衡方程求解θ
y
,然后结合m
y
计算滚珠直线导轨副俯仰角刚度。
[0065]
步骤s3中,计算滚珠直线导轨副的偏摆角刚度,具体包括:
[0066]
给定偏摆外力矩,建立滚珠直线导轨副偏摆角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0067]
δ
ij
=a
ij
‑
a0 δ0,
[0068][0069][0070]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;a
ij
表示外载荷作用下第i列滚道第j个滚珠处滑块与导轨曲率中心之间的距离;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xy平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
z
表示所述滚珠直线导轨副偏摆角位移,即在偏摆力矩作用下滑块相对于导轨产生的偏摆角位移;
[0071]
由所述偏摆角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,计算获得第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0072]
建立的滚珠直线导轨副的偏摆力矩平衡方程:
[0073][0074]
上式中:m
z
表示偏摆外载荷;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;χ
1j
、χ
2j
、χ
3j
、χ
4j
分别表示第一、二、三、四列滑块滚道和导轨
滚道曲率中心连线与y轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;
[0075]
运用newton
‑
raphson法迭代偏摆角位移与各滚珠滚道结合部的变形协调关系式、及偏摆力矩平衡方程求解θ
z
,然后结合m
z
计算滚珠直线导轨副偏摆角刚度。
[0076]
本发明的有益效果如下:
[0077]
本发明方法考虑了滑块与导轨在赫兹接触区外的弹性变形,以减小计算误差,能够更精确地计算滚珠直线导轨副在外力或外力矩作用下的五自由度静态刚度。本发明方法简便、计算效率高,特别适用于角刚度的计算,为导轨的优化设计与工程应用选型等提供技术保障。
附图说明
[0078]
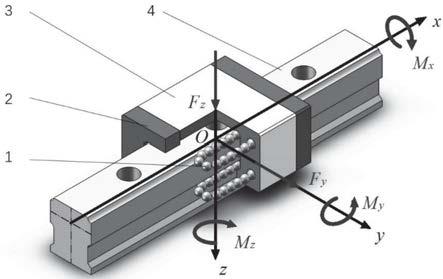
图1是本发明具体实施例的滚珠直线导轨副总体坐标系设定示意图。
[0079]
图2是本发明具体实施例的滚珠滚道接触模型示意图。
[0080]
图3是本发明具体实施例的滚珠滚道接触区域应力分布示意图。
[0081]
图4是本发明具体实施例的滚珠滚道结合部线接触等效弹簧示意图。
[0082]
图5是本发明具体实施例的转动载荷下滚珠直线导轨副变形示意图。
[0083]
图6是本发明具体实施例的俯仰力矩下滚珠直线导轨副受力平衡示意图。
[0084]
图7是本发明具体实施例的偏摆力矩下滚珠直线导轨副受力平衡示意图。
[0085]
图8是滚珠直线导轨副五个刚度随相应载荷变化曲线图。
[0086]
图中:1、滚珠;2、反向器端盖;3、滑块;4、导轨。
具体实施方式
[0087]
以下结合附图说明本发明的具体实施方式。
[0088]
本技术的一种滚动直线导轨副静态刚度计算与结构参数设计方法,包括以下步骤:
[0089]
步骤s1:提出滚道赫兹接触区外载荷与变形线性化假设,将滚道结合部接触关系简化为等效弹簧模型,基于赫兹点接触理论与有限元法,建立滚珠滚道柔性接触模型,根据滚珠滚道柔性接触模型得到滚珠滚道接触力与导轨、滚珠、滑块变形的关系;具体包括:
[0090]
在滚珠直线导轨内建立总体坐标系,如图1所示:滚珠直线导轨滚珠1均匀排列于滚道内,预紧状态下导轨4固定;反向器端盖2安装在滑块3的两端,工作状态下,滑块3相对于导轨4完成直线运动。设定总体坐标系o
‑
xyz于导轨副结构中心,x轴置于滑块滑动方向,y轴置于水平方向,z轴置于竖直方向。
[0091]
取单个滚珠
‑
滚道结合部作为研究对象,建立如图2、图3所示的模型。在外载荷作用下结合部变形主要包括三部分:滚珠在赫兹接触区内变形和滑块、导轨在赫兹接触区外的变形,结合部线接触等效弹簧结构如图4所示,取单个滚珠
‑
滚道接触作为研究对象,采用刚度系数k
hz
描述滚珠与滚道赫兹接触刚度,k
c
、k
r
分别用于描述滑块、导轨抵抗外力作用下产生弹性变形的能力。根据胡克定律可得到下式:
[0092]
p
ij
=k
cij
δ
cij
=k
hz
δ
ij3/2
=k
rij
δ
rij
ꢀꢀꢀ
(1)
[0093]
式(1)中,p
ij
表示第i列滚道第j个滚珠所受接触力,k
cij
、k
rij
和k
hz
分别表示第i列
滚道中j位置处滑块、导轨和滚珠的等效刚度,δ
cij
、δ
rij
和δ
ij
分别表示第i列滚道中j位置处滑块、导轨和滚珠的变形量;
[0094]
其中,在商用有限元软件中建立滚道接触模型,在第i列滚道中j位置处给定一组接触力q
ijk
,即可计算得到对应的滑块和导轨变形δ
cijk
和δ
rijk
,则滑块、导轨的等效刚度可分别通过以下两式计算:
[0095][0096][0097]
滚珠等效接触刚度为:
[0098][0099]
式(4)中,α
c
、α
r
分别为滑块、导轨与滚珠的赫兹接触系数,分别为:
[0100][0101][0102]
式中下标c、r分别表示滑块、导轨,i表示滚道列数;e
c
、e
r
为滑块、导轨滚道接触区椭圆离心率,e
c’、e
r’为滑块、导轨滚道当量弹性模量,∑ρ
c
、∑ρ
r
为滑块、导轨接触区曲率和函数,k(e)、e(e)分别为第一类、第二类椭圆积分,分别可由下式计算:
[0103][0104]
∑ρ=ρ
11
ρ
12
ρ
21
ρ
22
ꢀꢀꢀ
(8)
[0105][0106][0107]
上式中,e’表示当量弹性模量;e1和e2分别表示两点接触弹性体材料的弹性模量;v1和v2分别表示两点接触弹性体材料的泊松比;∑ρ表示主曲率和;ρ
11
、ρ
12
、ρ
21
以及ρ
22
分别代表两点接触弹性体在接触点处的主曲率,即曲率半径r
11
、r
12
、r
21
和r
22
的倒数;e表示接触区椭圆的离心率;θ表示椭圆积分变量;
[0108]
由式(1)得,当接触区离心率e和法向变形δ确定后,即可计算得到滚道接触力;
[0109]
步骤s2:考虑滚珠直线导轨副滚道内滚珠的预紧量,计算每个滚珠处滚道间的初始曲率中心距,采用下式:
[0110]
a0=r
c
r
r
‑
d0ꢀꢀꢀ
(11)
[0111]
δ0=d
‑
d0ꢀꢀꢀ
(12)
[0112]
上两式中,a0表示未预紧时每列滚道内滑块与导轨曲率中心之间的初始距离,r
c
和r
r
分别表示滚道内滑块、导轨的曲率半径,d0表示滚珠的公称直径;δ0表示通过每列滚道内
滚珠截面处滚道间的初始预紧量,d表示预紧后滚珠的实际直径;
[0113]
步骤s3:
[0114]
根据步骤s1和步骤s2得到的结果,计算滚珠直线导轨副的垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度;所述垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度的计算过程基本相同,具体包括:
[0115]
步骤s3a:计算滚珠直线导轨副的垂向刚度:
[0116]
步骤s3a1:给定垂向外载荷,建立滚珠直线导轨副垂向线位移δ
z
与各滚珠滚道结合部的变形协调关系,按式(13)~(15)列写变形协调方程;
[0117]
δ
ij
=a
i
‑
a0 δ0ꢀꢀꢀ
(13)
[0118][0119][0120]
上三式中,δ
ij
表示通过第i列滚道内第j个滚珠的总赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i列滚道内滑块与导轨实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
z
表示所述滚珠直线导轨副垂向线位移,即在垂向力作用下滑块相对于导轨产生的垂向线位移;
[0121]
步骤s3a2:由式(13)~(15)、以及步骤s1建立的滚珠滚道接触力与线位移的关系,计算得到在垂向力作用下,单排滚道内第j个滚道中的赫兹变形量δ
ij
,以及单排滚道第j个滚珠与滚道间的接触力p
ij
;
[0122]
步骤s3a3:建立滚珠直线导轨副的垂向力平衡方程:
[0123][0124]
以上三式中,f
z
表示滚珠直线导轨副受到的垂向力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;
[0125]
步骤s3a4:运用newton
‑
raphson法迭代(13)~(16),求解滚珠直线导轨副的垂向线位移δ
z
,再结合f
z
计算滚动直线导轨副垂向刚度k
z
:
[0126][0127]
步骤s3b:计算滚珠直线导轨副的水平刚度:
[0128]
步骤s3b1:给定水平方向外载荷,建立滚珠直线导轨副水平线位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0129]
δ
ij
=a
i
‑
a0 δ0ꢀꢀꢀ
(18)
[0130][0131][0132]
式(19)、(20)中,当i=1,4时符号取“ ”,反之取
“‑”
;以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠总的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i列滚道内滑块与导轨的实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
y
表示所述滚珠直线导轨副水平线位移,即在水平力作用下滑块相对于导轨产生的水平线位移;
[0133]
步骤s3b2:由式(18)~(20)、以及步骤s1建立的滚珠滚道接触力与线位移的关系,计算得到水平力作用下,单排滚道内第j个滚道中的赫兹变形量δ
ij
、以及单排滚道第j个滚珠与滚道间的接触力p
ij
;
[0134]
步骤s3b3:建立滚珠直线导轨副的水平力平衡方程:
[0135][0136]
上式中,f
y
表示滚珠直线导轨副受到的水平力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道的实际接触角;
[0137]
步骤s3b4:运用newton
‑
raphson法迭代(18)~(21)求解δ
y
,然后结合p
y
计算滚动直线导轨副水平刚度。
[0138]
根据f
y
和δ
y
计算滚珠直线导轨副的水平刚度k
y
:
[0139][0140]
步骤s3c:计算滚珠直线导轨副的转动角刚度:
[0141]
步骤s3c1:给定转动外力矩,滚珠直线导轨副的变形如图5所示,建立滚珠直线导轨副转动角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0142]
δ
ij
=a
i
‑
a0 δ0ꢀꢀꢀ
(23)
[0143][0144][0145]
式(24)、(25)中,当i=1,3时,符号取“ ”,反之取
“‑”
;以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;l
r
表示外载荷作用前滑块曲率中心到原点的距离;表示转动角位移引起的滑块曲率中心位移与水平方向的夹角;ai表示外载荷
作用下第i列滚道内滑块与导轨曲率中心之间的距离;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;θ
x
表示所述滚珠直线导轨副转动角位移,即在转动力矩作用下滑块相对于导轨产生的转动角位移;其中,l
r
和可由下式得到:
[0146][0147][0148]
式中l1表示左右两列滚珠中心距的一半;l2表示上下两列滚珠中心距的一半;f表示滚道密合度;d表示预紧后滚珠的实际直径;
[0149]
步骤s3c2:由式(23)~(27)、以及步骤s1建立的滚珠滚道接触力与线位移的关系、以及转动角位移和结构参数l
r
和的关系,计算得到转动力矩作用下,第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0150]
步骤s3c3:建立滚珠直线导轨副的转动力矩平衡方程:
[0151][0152]
上式中,m
x
表示滚珠直线导轨副受到的转动力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;l1表示左右两列滚珠中心距的一半;l2表示上下两列滚珠中心距的一半;
[0153]
步骤s3c4:运用newton
‑
raphson法迭代(23)~(28)求解θ
x
,然后结合m
x
计算滚珠直线导轨副转动角刚度k
θx
:
[0154][0155]
步骤s3d:计算滚珠直线导轨副的俯仰角刚度,具体包括:
[0156]
步骤s3d1:给定俯仰外力矩,如图6所示,为滚珠直线导轨副受力平衡示意图,建立滚珠直线导轨副俯仰角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0157]
δ
ij
=a
ij
‑
a0 δ0ꢀꢀꢀ
(30)
[0158][0159][0160]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xz平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;a
ij
表示外载荷作用下第i列滚道第j个滚珠
处滑块与导轨曲率中心之间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
y
表示所述滚珠直线导轨副俯仰角位移,即在俯仰力矩作用下滑块相对于导轨产生的俯仰角位移;其中,δr
j
和l
pij
由下式得到:
[0161][0162][0163]
式中,l
j
表示第j个滚珠与滑块滚道接触点到导轨副中心的距离,γ
j
表示第j个滚珠
‑
滑块滚道的接触点和导轨副中心连线的z向角度,可由以下两式得到:
[0164][0165][0166]
式中,k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;l2表示上下两列滚珠中心距的一半;
[0167]
滚珠受力方向角α
ij
、ε
ij
、χ
ij
可由下式得到:
[0168][0169][0170][0171]
步骤s3d2:由式(30)~(39)、以及步骤s1建立的滚珠滚道接触力与线位移的关系,计算在俯仰力矩作用下第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0172]
步骤s3d3:建立滚珠直线导轨副的俯仰力矩平衡方程:
[0173][0174]
上式中:m
y
表示滚珠直线导轨副受到的俯仰力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;ε
1j
、ε
2j
、ε
3j
、ε
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与z轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;
[0175]
步骤s3d4:运用newton
‑
raphson法迭代由式(30)~(40)求解θ
y
,然后结合m
y
计算滚珠直线导轨副俯仰角刚度k
θy
:
[0176][0177]
步骤s3e:计算滚珠直线导轨副的偏摆角刚度,具体包括:
[0178]
步骤s3e1:给定偏摆外力矩,如图7所示,为滚珠直线导轨副受力平衡示意图,建立滚珠直线导轨副偏摆角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
[0179]
δ
ij
=a
ij
‑
a0 δ0ꢀꢀꢀ
(42)
[0180][0181][0182]
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;a
ij
表示外载荷作用下第i列滚道第j个滚珠处滑块与导轨曲率中心之间的距离;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xy平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
z
表示所述滚珠直线导轨副偏摆角位移,即在偏摆力矩作用下滑块相对于导轨产生的偏摆角位移;其中,δr
j
可由下式计算得到:
[0183][0184]
式中,l
j
表示第j个滚珠与滑块滚道接触点到导轨副中心的距离,γ
j
表示第j个滚珠
‑
滑块滚道的接触点和导轨副中心连线的y向角度,可由以下两式得到:
[0185]
可由以下两式得到:
[0186][0187][0188]
式中,k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;l1表示左右两列滚珠中心距的一半;
[0189]
滚珠受力方向角α
ij
、ε
ij
、χ
ij
可由下式得到:
[0190][0191][0192][0193]
步骤s3e2:由式(42)~(50)、以及步骤s1建立的滚珠滚道接触力与线位移的关系,
计算在偏摆力矩作用下第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;
[0194]
步骤s3e3:建立的滚珠直线导轨副的偏摆力矩平衡方程:
[0195][0196]
上式中:m
z
表示偏摆外载荷;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;χ
1j
、χ
2j
、χ
3j
、χ
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与y轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;
[0197]
步骤s3e4:运用newton
‑
raphson法迭代式(42)~(51)求解θ
z
,然后结合m
z
计算滚珠直线导轨副偏摆角刚度k
θz
:
[0198][0199]
步骤s4:对滚动直线导轨副结构参数设计,提高导轨副整体刚度:
[0200]
首先计算滚珠直线导轨副五自由度静态刚度和预紧量、初始接触角等设计变量的对应关系,再将导轨副系统刚度最大值对应的设计变量取值,确定为设计变量的最佳值。本实施例计算的滚珠直线导轨副基本参数列于表1,由步骤s1至步骤s4计算得到滚珠直线导轨副的五自由度静刚度曲线,如图8所示。
[0201]
表1滚珠直线导轨副基本参数
[0202][0203][0204]
图8中(a)、(b)、(c)、(d)和(e)分别是滚珠直线导轨副垂向刚度随垂向力变化曲线、水平刚度随横向力变化曲线、转动角刚度随转动力矩变化曲线、俯仰角刚度随俯仰力矩变化曲线以及偏摆角刚度随偏摆力矩变化曲线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。