技术特征:
1.一种滚动直线导轨副静态刚度计算与结构参数设计方法,其特征在于,包括以下步骤:步骤s1:提出滚道赫兹接触区外载荷与变形线性化假设,将滚道结合部接触关系简化为等效弹簧模型,基于赫兹点接触理论与有限元法,建立滚珠滚道柔性接触模型:p
ij
=k
cij
δ
cij
=k
hz
δ
ij3/2
=k
rij
δ
rij
上式中,p
ij
表示第i列滚道第j个滚珠所受接触力,k
cij
、k
rij
和k
hz
分别表示第i列滚道中j位置处滑块、导轨和滚珠的等效刚度,δ
cij
、δ
rij
和δ
ij
分别表示第i列滚道中j位置处滑块、导轨和滚珠的变形量;根据所述滚珠滚道柔性接触模型得到滚珠滚道接触力与导轨、滚珠、滑块变形的关系;步骤s2:考虑滚珠直线导轨副滚道内滚珠的预紧量,计算每个滚珠处滚道间的初始曲率中心距,采用下式:a0=r
c
r
r
‑
d0,δ0=d
‑
d0上两式中,a0表示未预紧时每列滚道内滑块与导轨曲率中心之间的初始距离,r
c
和r
r
分别表示滚道内滑块、导轨的曲率半径,d0表示滚珠的公称直径;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量,d表示预紧后滚珠的实际直径;步骤s3:根据步骤s1和步骤s2得到的结果,计算滚珠直线导轨副的垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度;所述垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度的计算过程相同,包括:给定相应载荷,建立滚珠直线导轨副在给定载荷方向的位移与各滚珠滚道结合部的变形协调关系;由步骤s1建立的滚珠滚道柔性接触模型,计算在给定载荷作用下的导轨副各滚珠滚道接触力;建立滚珠直线导轨副的相应载荷下的平衡方程,求解滚珠直线导轨在给定载荷方向的位移,计算得到相应的刚度;步骤s4:将滚珠直线导轨副系统刚度的最大值对应的设计变量取值,确定为设计变量的最佳值,对滚动直线导轨副结构参数设计。2.根据权利要求1所述的方法,其特征在于,步骤s3中,计算滚珠直线导轨副的垂向刚度,具体包括:给定垂向外载荷,建立滚珠直线导轨副垂向线位移与各滚珠滚道结合部的变形协调关系,其表达式为:δ
ij
=a
i
‑
a0 δ0,,上三式中,δ
ij
表示通过第i列滚道内第j个滚珠的总赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i
列滚道内滑块与导轨实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
z
表示所述滚珠直线导轨副垂向线位移,即在垂向力作用下滑块相对于导轨产生的垂向线位移;由所述垂向线位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得单排滚道内第j个滚道中的赫兹变形量δ
ij
,以及单排滚道第j个滚珠与滚道间的接触力p
ij
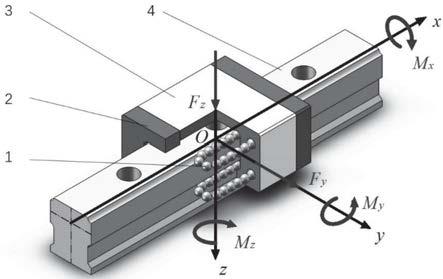
;建立滚珠直线导轨副的垂向力平衡方程:上式中,f
z
表示滚珠直线导轨副受到的垂向力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;运用newton
‑
raphson法迭代垂向线位移与各滚珠滚道结合部的变形协调关系关系式、及垂向力平衡方程求解δ
z
,再结合f
z
计算滚动直线导轨副垂向刚度。3.根据权利要求2所述的方法,其特征在于,步骤s3中,计算滚珠直线导轨副的水平刚度,具体包括:给定水平方向外载荷,建立滚珠直线导轨副水平线位移与各滚珠滚道结合部的变形协调关系,其表达式为:δ
ij
=a
i
‑
a0 δ0,a
i
=[(a0sinβ0‑
δc
i
sinβ
i
‑
δr
i
sinβ
i
)2 (a0cosβ0‑
δc
i
cosβ
i
‑
δr
i
cosβ
i
±
δ0)2]
1/2
,以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠总的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;δ0表示每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;a
i
表示外载荷作用下第i列滚道内滑块与导轨的实际曲率中心距;β
i
表示外载荷作用下第i列滚道内滚珠与滚道的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;δ
y
表示所述滚珠直线导轨副水平线位移,即在水平力作用下滑块相对于导轨产生的水平线位移;由所述水平线位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得单排滚道内第j个滚道中的赫兹变形量δ
ij
、以及单排滚道第j个滚珠与滚道间的接触力p
ij
;建立滚珠直线导轨副的水平力平衡方程:上式中,f
y
表示滚珠直线导轨副受到的水平力;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、
三、四列滚道内滚珠与滚道的实际接触角;运用newton
‑
raphson法迭代水平线位移与各滚珠滚道结合部的变形协调关系式、及水平力平衡方程求解δ
y
,然后结合f
y
计算滚动直线导轨副水平刚度。4.根据权利要求2所述的方法,其特征在于,步骤s3中,计算滚珠直线导轨副的转动角刚度。具体包括:给定转动外力矩,建立滚珠直线导轨副转动角位移与各滚珠滚道结合部的变形协调关系,其表达式为:δ
ij
=a
i
‑
a0 δ0,,以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;l
r
表示外载荷作用前滑块曲率中心到原点的距离;表示转动角位移引起的滑块曲率中心位移与水平方向的夹角;a
i
表示外载荷作用下第i列滚道内滑块与导轨曲率中心之间的距离;β
i
表示外载荷作用下第i列滚道内滚珠与滚道间的实际接触角;δc
i
和δr
i
分别表示外载荷作用下第i列滑块滚道和导轨滚道的弹性变形量;θ
x
表示所述滚珠直线导轨副转动角位移,即在转动力矩作用下滑块相对于导轨产生的转动角位移;由所述转动角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,得到第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;建立滚珠直线导轨副的转动力矩平衡方程:上式中,m
x
表示滚珠直线导轨副受到的转动力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;β1、β2、β3、β4分别表示外载荷作用下第一、二、三、四列滚道内滚珠与滚道间的实际接触角;l1表示左右两列滚珠中心距的一半;l2表示上下两列滚珠中心距的一半;运用newton
‑
raphson法迭代转动角位移与各滚珠滚道结合部的变形协调关系式,及转动力矩平衡方程求解θ
x
,然后结合m
x
计算滚珠直线导轨副转动角刚度。5.根据权利要求2所述的方法,其特征在于,步骤s3中,计算滚珠直线导轨副的俯仰角刚度,具体包括:给定俯仰外力矩,建立滚珠直线导轨副俯仰角位移与各滚珠滚道结合部的变形协调关系,其表达式为:
δ
ij
=a
ij
‑
a0 δ0,a
ij
={(
‑
l
pij
θ
z
)2 (a0cosβ0‑
2δr
j
)2 (2l
pij
tanβ0)2}
1/2
‑
δc
ij
‑
δr
ij
,以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xz平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;a
ij
表示外载荷作用下第i列滚道第j个滚珠处滑块与导轨曲率中心之间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
y
表示所述滚珠直线导轨副俯仰角位移,即在俯仰力矩作用下滑块相对于导轨产生的俯仰角位移;由所述俯仰角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,计算获得第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;建立滚珠直线导轨副的俯仰力矩平衡方程:上式中:m
y
表示滚珠直线导轨副受到的俯仰力矩;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;ε
1j
、ε
2j
、ε
3j
、ε
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与z轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;运用newton
‑
raphson法迭代俯仰力位移与各滚珠滚道结合部的变形协调关系式、及俯仰力矩平衡方程求解θ
y
,然后结合m
y
计算滚珠直线导轨副俯仰角刚度。6.根据权利要求2所述的方法,其特征在于,步骤s3中,计算滚珠直线导轨副的偏摆角刚度,具体包括:给定偏摆外力矩,建立滚珠直线导轨副偏摆角位移与各滚珠滚道结合部的变形协调关系,其表达式为:δ
ij
=a
ij
‑
a0 δ0,,
以上三式中,δ
ij
表示通过第i列滚道内第j个滚珠截面处滚道间的赫兹变形量;a0表示未预紧时每列滚道内滑块与导轨的初始曲率中心距;β0表示外载荷作用前第i列滚道内各个滚珠与滚道间的初始接触角;δ0表示通过每列滚道内滚珠截面处滚道间的初始预紧量;a
ij
表示外载荷作用下第i列滚道第j个滚珠处滑块与导轨曲率中心之间的距离;δr
j
为外载荷作用下第j个滚珠球心的位移;l
pij
为xy平面内外载荷作用下第i列滚道内第j个滚珠球心与滑块滚道曲率中心间的距离;β
ij
表示外载荷作用下第i列滚道内第j个滚珠与滚道间的实际接触角;δc
ij
、δr
ij
分别表示外载荷作用下第i列滚道第j个滚珠处滑块滚道、导轨滚道的弹性变形量;θ
z
表示所述滚珠直线导轨副偏摆角位移,即在偏摆力矩作用下滑块相对于导轨产生的偏摆角位移;由所述偏摆角位移与各滚珠滚道结合部的变形协调关系、以及步骤s1建立的滚珠滚道柔性接触模型,计算获得第i列滚道内第j个滚道中的赫兹变形量δ
ij
,以及第i列滚道内第j个滚珠与滚道间的接触力p
ij
;建立的滚珠直线导轨副的偏摆力矩平衡方程:上式中:m
z
表示偏摆外载荷;p
1j
、p
2j
、p
3j
、p
4j
分别表示第一、二、三、四列滚道中第j个滚珠与滚道间的法向接触力;α
1j
、α
2j
、α
3j
、α
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与x轴的夹角;χ
1j
、χ
2j
、χ
3j
、χ
4j
分别表示第一、二、三、四列滑块滚道和导轨滚道曲率中心连线与y轴的夹角;l1表示左右两列滚珠中心距的一半;k=j
‑
7,j表示滚珠序号;d表示预紧后滚珠的实际直径;运用newton
‑
raphson法迭代偏摆角位移与各滚珠滚道结合部的变形协调关系式、及偏摆力矩平衡方程求解θ
z
,然后结合m
z
计算滚珠直线导轨副偏摆角刚度。
技术总结
本发明涉及一种滚动直线导轨副静态刚度计算与结构参数设计方法,包括步骤S1、提出滚道赫兹接触区外载荷与变形线性化假设,将滚道结合部接触关系简化为等效弹簧模型,基于赫兹点接触理论与有限元法,建立滚珠滚道柔性接触模型;步骤S2、考虑滚珠直线导轨副滚道内滚珠的预紧量,计算每个滚珠处滚道间的初始曲率中心距;步骤S3、计算滚珠直线导轨副的垂向刚度、水平刚度、转动角刚度、俯仰角刚度及偏摆角刚度;步骤S4:将滚珠直线导轨副系统刚度的最大值对应的设计变量取值,确定为设计变量的最佳值,对滚动直线导轨副结构参数设计。本发明更精确、简便地计算导轨静刚度值,并为导轨副的参数设计提供技术方法。参数设计提供技术方法。参数设计提供技术方法。
技术研发人员:蒋书运 王天昱
受保护的技术使用者:东南大学
技术研发日:2021.08.16
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。