1.本发明涉及读写智能识别技术领域,特别涉及一种正确读写坐标指数标定方法及系统。
背景技术:
2.当今社会已经进入了一个信息爆炸的时代,无论是学生还是成人,每天都需要进行大量的伏案工作、学习。但是在工作和学习过程中,错误的坐姿王伟会导致疲劳,带来视力的下降,特别是学生群体,相关资料显示:在校学生近视率日渐上升,大学生达70%、中学生达30%~40%、小学生已达20%。同时,因坐姿不正确产生的脊椎弯曲的学生比例也很高。尽管老师和家长斗采取了各种措施进行纠正孩子的坐姿,但是不管老师还是家长,在儿童读写时都无法一直在儿童旁边进行监督和提醒。
3.不良的读写姿态会带来视力与脊椎等身体方面的康健损害,促使了读写姿态的判断方法及相关便携式设备(如智能电话手表)的产生。不过,受到技术发展限制,这类便携式设备的功能有限,因此多数的读写姿态的判断方法采用的数据处理量并不大,而人的动作与姿态千变万化,相似性动作也较多,这对判断的准确性有较大影响;现有的方法与产品中还没有进行大量的数据处理来对读写姿态进行多维度解析以提供判断准确性的方式。
技术实现要素:
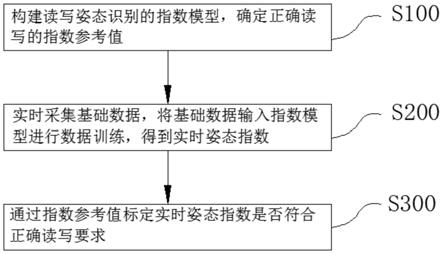
4.为了解决上述技术问题,本发明提供了一种正确读写坐标指数标定方法,包括以下步骤:
5.s100构建读写姿态识别的指数模型,确定正确读写的指数参考值;
6.s200实时采集基础数据,将基础数据输入指数模型进行数据训练,得到实时姿态指数;
7.s300通过指数参考值标定实时姿态指数是否符合正确读写要求。
8.可选的,在s100步骤中,所述指数参考值通过以下方式确定:
9.根据用户设置的身高、桌面高度和坐椅高度,通过预设算法确定指数参考值;
10.若用户没有进行身高、桌面高度和坐椅高度的设置,则根据提供的使用儿童年龄或者在校就读年级,从预置的儿童身高对照表查找身高,采用默认桌面高度和坐椅高度,通过预设算法确定指数参考值。
11.可选的,在s300步骤中,基于三维坐标系构建实时场景视觉模型,将实时姿态指数的标定情况在实时场景视觉模型中进行显示。
12.可选的,在s100步骤中,所述指数模型构建方式如下:
13.s110基于神经网络理论构建指数表达基础网络,根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵;
14.s120提取指数表达基础网络的特征,包括采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值;
15.s130训练神经网络模型,包括根据游走序列,采用姿态样本数据进行神经网络模型参数的训练,得到指数模型。
16.可选的,采用的线性分布和/或网格算法,考虑时间轴持续度,以概率统计、逼近论和凸分析建立评分数学模型,在s300步骤中,在标定实时姿态指数是否符合正确读写要求时,根据基础数据以评分数学模型进行姿态评分,以姿态评分对实时姿态指数的标定进行验证。
17.本发明还提供了一种正确读写坐标指数标定系统,包括客户端与服务端;所述客户端内置数据采集模块和第一通讯模块,所述服务端设置指数标定平台和第二通讯模块,所述第一通讯模块与第二通讯模块通过网络连接进行数据传输;
18.所述数据采集模块连接有三轴加速度传感器和距离传感器,所述数据采集模块用于实时采集基础数据,将基础数据通过网络传输至指数标定平台,并输入指数模型进行数据训练,得到实时姿态指数;
19.所述指数标定平台内构建有读写姿态识别的指数模型,并通过指数模型确定正确读写的指数参考值,并通过指数参考值标定实时姿态指数是否符合正确读写要求。
20.可选的,所述客户端为智能电话手表,所述第一通讯模块为带sim卡的通讯模组。
21.可选的,所述指数参考值通过以下方式确定:
22.首先,通过初始化信息提示用户实施并保持预定时长的正确读写姿态;
23.其次,采集用户在正确读写姿态时的初始化数据;
24.最后,将初始化数据输入指数模型进行数据训练,得到指数参考值。
25.可选的,所述指数模型通过以下方式构建:
26.s110基于神经网络理论构建指数表达基础网络,根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵;
27.s120提取指数表达基础网络的特征,包括采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值;
28.s130训练神经网络模型,包括根据游走序列,采用姿态样本数据进行神经网络模型参数的训练,得到指数模型。
29.可选的,所述距离传感器采用激光距离传感器,所述激光距离传感器配置有激光发射电路,所述激光发射电路包括驱动芯片x、第一电阻r1、第二电阻r2、第三电阻r3、第一电容c0、第二电容c1、第三电容c2、场效应晶体管mos、发光二极管d3、第一稳压二极管d1和第二稳压二极管d2;
30.第一电阻r1的一端与直流电源的正极连接,另一端与驱动芯片x的电源输入端子1连接;驱动芯片x的电源输入端子1与第一电容c0的一端连接,第一电容c0的另一端与驱动芯片x的电源输入端子4连接;驱动芯片x的端子2和上一级脉冲信号连接,驱动芯片x的端子5和直流电源的负极连接,驱动芯片x的端子6和端子7连接;驱动芯片x的端子8和第一稳压二极管d1的负极连接,第一稳压二极管d1的正极和第二稳压二极管d2的负极连接,第二稳压二极管d2的正极和直流电源负极连接;第二电阻r2的一端和驱动芯片x的端子6连接,第二电阻r2的另一端和场效应晶体管mos的门极连接;场效应晶体管mos的漏极和第三电阻r3的一端连接,第三电阻r3的另一端和直流电源正极连接;场效应晶体管mos的源极和发光二极管d3的正极连接,发光二极管d3的负极和地连接;第二电容c1的一端和场效应晶体管mos
的漏极连接,第二电容c1的另一端和地连接;第三电容c2的一端和场效应晶体管mos的漏极连接,第三电容c2的另一端和地连接;电源的负极接地。
31.本发明的正确读写坐标指数标定方法及系统,通过构建读写姿态识别的指数模型,以指数模型对正确读写姿态的多维度解析,以确定正确读写的指数参考值,再通过将采集的基础数据输入指数模型进行数据训练,得到实时姿态指数,最后通过指数参考值标定实时姿态指数是否符合正确读写要求;本方案通过对姿态数据的多维度解析,可以较多反映人的行为动作以及姿态的细节差异,形成多维度的实时姿态指数用来标定实时姿态是否符合正确读写要求,从而提高读写姿态识别与判断的准确性。
32.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
33.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
34.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
35.图1为本发明实施例中一种正确读写坐标指数标定方法流程图;
36.图2为本发明的正确读写坐标指数标定方法实施例采用的指数模型构建流程图;
37.图3为本发明实施例中一种正确读写坐标指数标定系统示意图;
38.图4为本发明的正确读写坐标指数标定系统实施例中客户端采用的智能电话手表示意图;
39.图5为本发明的正确读写坐标指数标定系统实施例采用的激光距离传感器配置的激光发射电路示意图。
具体实施方式
40.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
41.如图1所示,本发明实施例提供了一种正确读写坐标指数标定方法,包括以下步骤:
42.s100构建读写姿态识别的指数模型,确定正确读写的指数参考值;
43.s200实时采集基础数据,将基础数据输入指数模型进行数据训练,得到实时姿态指数;
44.s300通过指数参考值标定实时姿态指数是否符合正确读写要求。
45.上述技术方案的工作原理和有益效果为:本方案通过构建读写姿态识别的指数模型,以指数模型对正确读写姿态的多维度解析,以确定正确读写的指数参考值,再通过将采集的基础数据输入指数模型进行数据训练,得到实时姿态指数,最后通过指数参考值标定实时姿态指数是否符合正确读写要求;本方案通过对姿态数据的多维度解析,可以较多反映人的行为动作以及姿态的细节差异,形成多维度的实时姿态指数用来标定实时姿态是否符合正确读写要求,从而提高读写姿态识别与判断的准确性。
46.在一个实施例中,在s100步骤中,所述指数参考值通过以下方式确定:
47.根据用户设置的身高、桌面高度和坐椅高度,通过预设算法确定指数参考值;
48.若用户没有进行身高、桌面高度和坐椅高度的设置,则根据提供的使用儿童年龄或者在校就读年级,从预置的儿童身高对照表查找身高,采用默认桌面高度和坐椅高度,通过预设算法确定指数参考值。
49.上述技术方案的工作原理和有益效果为:本方案的指数参考值通过预设算法确定,预设算法以身高、桌面高度和坐椅高度为已知参数,这些参数用户(一般为家长或者老师)可以根据实际情况进行设置,若用户没有进行身高、桌面高度和坐椅高度的设置,系统提供默认方式确定,根据提供的使用儿童年龄或者在校就读年级,从预置的儿童身高对照表查找身高,默认的桌面高度和坐椅高度可以采用标准的桌面高度和坐椅高度,通过该方案确定的指数参考值与用户契合度较高,为后续提供指数标定基础;另外,还可以通过使用儿童的身高,确定最佳的桌面高度和坐椅高度,用以指导用户调整或者更换实际使用的桌面高度和坐椅高度;指数参考值包括儿童用眼距离、左右手摆放位置坐标等指数。
50.在一个实施例中,在s300步骤中,基于三维坐标系构建实时场景视觉模型,将实时姿态指数的标定情况在实时场景视觉模型中进行显示。
51.上述技术方案的工作原理和有益效果为:本方案基于三维坐标系构建实时场景视觉模型,通过将实时姿态指数的标定情况在实时场景视觉模型中进行显示,让观察者具有现场既视感和代入感,借助坐标使得实时姿态指数的标定更为直观。
52.在一个实施例中,如图2所示,在s100步骤中,所述指数模型构建方式如下:
53.s110基于神经网络理论构建指数表达基础网络,根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵;
54.s120提取指数表达基础网络的特征,包括采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值;
55.s130训练神经网络模型,包括根据游走序列,采用姿态样本数据进行神经网络模型参数的训练,得到指数模型。
56.上述技术方案的工作原理和有益效果为:本方案基于神经网络理论来构建指数表达基础网络,然后根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵,再提取指数表达基础网络的特征,采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值,通过训练神经网络模型,根据游走序列,采用姿态样本数据进行神经网络模型参数的训练得到指数模型;该指数模型可以处理较多的姿态数据,且能够体现不同姿态数据间的关联性,由关联性提取出来的特征值可以更为准确地展现姿态特征,使得指数模型可更全面描述姿态特征。
57.在一个实施例中,所述连接矩阵表示为p=[a
ij
],且计算公式为:
[0058][0059]
上式中,n表示姿态表达的姿态数据个数;d
i
和d
j
表示姿态数据;τ(d
i
,d
j
)表示姿态数据d
i
和d
j
之间的相关系数;γ表示根据无标度网络原则确定的加权幂指数;
[0060]
所述关联矩阵表示为q=[b
ij
],且计算公式为:
[0061][0062]
上式中,∑
k
∑
u
a
ik
a
uj
表示连接矩阵中数据a
ij
的同行数据与同列数据的乘积和,其中k≠j且u≠i;min表示取最小值函数;∑
k
a
ik
表示连接矩阵中数据a
ij
的同列数据的邻接系数和;∑
u
a
uj
表示连接矩阵中数据a
ij
的同t行数据的邻接系数和。
[0063]
上述技术方案的工作原理和有益效果为:本方案提供了连接矩阵和关联矩阵的可选表达式,采用上述矩阵方式进行姿态数据处理,在增加数据处理量的情况下,可以提高数据处理效率;上述公式引入姿态数据的相关系数,能够明确并量化模型中处理的不同姿态数据的关系,有利于对姿态的多维度描述,能够更好地体现姿态差异细节,从而增加姿态识别的准确性。
[0064]
在一个实施例中,采用的线性分布和/或网格算法,考虑时间轴持续度,以概率统计、逼近论和凸分析建立评分数学模型,在s300步骤中,在标定实时姿态指数是否符合正确读写要求时,根据基础数据以评分数学模型进行姿态评分,以姿态评分对实时姿态指数的标定进行验证。
[0065]
上述技术方案的工作原理和有益效果为:本方案通过采用的线性分布和/或网格算法,考虑时间轴持续度,以概率统计、逼近论和凸分析建立评分数学模型,根据基础数据以评分数学模型进行姿态评分,用于对实时姿态指数的标定进行验证,从而进一步提高姿态识别的准确性,实践证明,采用该方案可以将姿态识别的准确性提高至90%以上。
[0066]
如图3所示,本发明实施例提供了一种正确读写坐标指数标定系统,包括客户端10与服务端20;所述客户端10内置数据采集模块101和第一通讯模块102,所述服务端20设置指数标定平台201和第二通讯模块202,所述第一通讯模块102与第二通讯模块202通过网络连接进行数据传输;
[0067]
所述数据采集模块101连接有三轴加速度传感器103和距离传感器105,所述数据采集模块101用于实时采集基础数据,将基础数据通过网络传输至指数标定平台201,并输入指数模型进行数据训练,得到实时姿态指数;
[0068]
所述指数标定平台201内构建有读写姿态识别的指数模型,并通过指数模型确定正确读写的指数参考值,并通过指数参考值标定实时姿态指数是否符合正确读写要求。
[0069]
上述技术方案的工作原理和有益效果为:本方案采用能够相互通讯的客户端与服务端,通过在服务端构建读写姿态识别的指数模型,以指数模型对正确读写姿态的多维度解析,以确定正确读写的指数参考值,再通过客户端采集基础数据传输至服务端,并将采集的基础数据输入指数模型进行数据训练,得到实时姿态指数,最后通过指数参考值标定实时姿态指数是否符合正确读写要求;本方案以能够相互通讯的客户端与服务端结合,将对姿态数据的多维度解析功能设置在服务端,避免了客户端数据处理量有限的不利影响,可以较多反映人的行为动作以及姿态的细节差异,形成多维度的实时姿态指数用来标定实时姿态是否符合正确读写要求,从而提高读写姿态识别与判断的准确性。
[0070]
在一个实施例中,如图4所示,所述客户端为智能电话手表,所述第一通讯模块为带sim卡的通讯模组。
[0071]
上述技术方案的工作原理和有益效果为:本方案的客户端采用智能电话手表,便
于用户随身佩戴使用,在智能电话手表内设置带sim卡的通讯模组用于实现网络连接与通讯,通讯模组可以是4g模组,将采集的数据传输至服务端进行处理,可以破解本身的数据处理量局限性,提高读写指数标定准确性;当然,为了提高无网适用性以及节省功耗,还是可以在智能电话手表(芯片)中植入简易坐姿判定程序,兼顾本地硬件判定,以便在没有网络情况下,智能电话手表仍然能实现坐姿判定和纠正,此简易坐姿判定程序可通过服务端下发升级。
[0072]
在一个实施例中,所述指数参考值通过以下方式确定:
[0073]
首先,通过初始化信息提示用户实施并保持预定时长的正确读写姿态;
[0074]
其次,采集用户在正确读写姿态时的初始化数据;
[0075]
最后,将初始化数据输入指数模型进行数据训练,得到指数参考值。
[0076]
上述技术方案的工作原理和有益效果为:本方案的指数参考值通过在第一次使用前进行初始化,以初始化信息提示告知用户实施并保持预定时长的正确读写姿态,来采集用户在正确读写姿态时的初始化数据,输入指数模型进行数据训练,得到指数参考值,若初始化时用户实施并保持正确读写姿态的预定时长不满足要求或者由于其他原因,导致无法得到合理的指数参考值,则重新进行初始化,通过该方案在使用前确定与用户契合度较高的指数参考值,为后续提供指数标定基础;也可采用家长输入儿童身高、桌子高度、椅子高度以及儿童用眼距离和左右手摆放位置坐标等信息,自动运算得到正确读写模型坐标,若家长只给出了儿童身高但未给出桌子和椅子高度设置等其它设置,系统自动按预设标准桌椅数据得到正确读写模型坐标;若家长只给出了儿童年龄,系统自动按预设的年龄对应身高值区间进行坐标判断。
[0077]
在一个实施例中,如图2所示,所述指数模型通过以下方式构建:
[0078]
s110基于神经网络理论构建指数表达基础网络,根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵;
[0079]
s120提取指数表达基础网络的特征,包括采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值;
[0080]
s130训练神经网络模型,包括根据游走序列,采用姿态样本数据进行神经网络模型参数的训练,得到指数模型。
[0081]
上述技术方案的工作原理和有益效果为:本方案基于神经网络理论来构建指数表达基础网络,然后根据读写姿态的姿态表达数据计算连接矩阵与关联矩阵,再提取指数表达基础网络的特征,采用二阶随机游走方式遍历网络中的每个节点,将关联网络的各个姿态数据节点转换为特征向量,得到游走序列和网络的特征值,通过训练神经网络模型,根据游走序列,采用姿态样本数据进行神经网络模型参数的训练得到指数模型;该指数模型可以处理较多的姿态数据,且能够体现不同姿态数据间的关联性,由关联性提取出来的特征值可以更为准确地展现姿态特征,使得指数模型可更全面描述姿态特征。
[0082]
在一个实施例中,如图5所示,所述距离传感器采用激光距离传感器,所述激光距离传感器配置有激光发射电路,所述激光发射电路包括驱动芯片x、第一电阻r1、第二电阻r2、第三电阻r3、第一电容c0、第二电容c1、第三电容c2、场效应晶体管mos、发光二极管d3、第一稳压二极管d1和第二稳压二极管d2;
[0083]
第一电阻r1的一端与直流电源的正极连接,另一端与驱动芯片x的电源输入端子1
连接;驱动芯片x的电源输入端子1与第一电容c0的一端连接,第一电容c0的另一端与驱动芯片x的电源输入端子4连接;驱动芯片x的端子2和上一级脉冲信号连接,驱动芯片x的端子5和直流电源的负极连接,驱动芯片x的端子6和端子7连接;驱动芯片x的端子8和第一稳压二极管d1的负极连接,第一稳压二极管d1的正极和第二稳压二极管d2的负极连接,第二稳压二极管d2的正极和直流电源负极连接;第二电阻r2的一端和驱动芯片x的端子6连接,第二电阻r2的另一端和场效应晶体管mos的门极连接;场效应晶体管mos的漏极和第三电阻r3的一端连接,第三电阻r3的另一端和直流电源正极连接;场效应晶体管mos的源极和发光二极管d3的正极连接,发光二极管d3的负极和地连接;第二电容c1的一端和场效应晶体管mos的漏极连接,第二电容c1的另一端和地连接;第三电容c2的一端和场效应晶体管mos的漏极连接,第三电容c2的另一端和地连接;电源的负极接地。
[0084]
上述技术方案的工作原理和有益效果为:本方案中的第一电阻r1的一端与直流电源的正极连接,另一端与驱动芯片x的电源输入端子1连接,以上连接与地之间构成驱动芯片x输入端的电源输入回路;驱动芯片x的电源输入端子1与第一电容c0的一端连接,第一电容c0的另一端与驱动芯片x的电源输入端子4连接,以上连接给驱动芯片x的电源输入端子1和电源输入端子4之间滤波;驱动芯片x的端子2和上一级脉冲信号连接,用以开通驱动芯片x的输出端子6和输出端子7向外发送信号;驱动芯片x的端子5和直流电源的负极连接,构成驱动芯片x输入端的完整电源供电回路;驱动芯片x的端子6和端子7连接,用以向外共同发出信号;驱动芯片x的端子8和第一稳压二极管d1的负极连接,第一稳压二极管d1的正极和第二稳压二极管d2的负极连接,第二稳压二极管d2的正极和直流电源负极连接,以上连接构成驱动芯片x输出端的电源供电回路;第二电阻r2的一端和驱动芯片x的端子6连接,第二电阻r2的另一端和场效应晶体管mos的门极连接,以上连接与地之间构成场效应晶体管mos的门极输入回路;场效应晶体管mos的漏极和r3的一端连接,r3的另一端和直流电源正极连接,以上连接与地之间构成场效应晶体管mos漏极的输入回路;场效应晶体管mos的源极和发光二极管d3的正极连接,发光二极管d3的负极和地连接,以上连接与地之间构成激光发射回路;第二电容c1的一端和场效应晶体管mos的漏极连接,第二电容c1的另一端和地连接,以上连接构成发光回路的第一滤波电路;第三电容c2的一端和场效应晶体管mos的漏极连接,第三电容c2的另一端和地连接,以上连接构成发光回路的第二滤波电路;电源的负极接地;以上连接均指电性连接。第一电阻r1是驱动芯片x的电源输入电阻,用来限制驱动芯片x的输入电流,防止输入电流过大烧毁驱动芯片x;脉冲信号是上一级控制器发出命令后,经过执行器生成的驱动芯片x的启动信号;驱动芯片x可选点频率适合短距离测量的芯片;驱动芯片x的端子6和端子7连接,共同给场效应晶体管mos发送导通信号;第一电容c0用来把驱动芯片x电源输入中耦合的高频源信号滤掉,使得驱动芯片的输入源中不含有高频信号,以防驱动芯片输出误触发;第一稳压二极管d1和第二稳压二极管d2组成的电路作用是将驱动芯片x输出端的电源严格平分加在驱动芯片x的端子7和端子8之间以及端子5和端子6之间;第二电阻r2是场效应晶体管mos的输入电阻,用来限制场效应晶体管mos的门极电流,以防电流过大烧坏场效应晶体管mos;第三电阻r3是场效应晶体管mos的漏极电阻,用来限制场效应晶体管mos的漏极电流;发光二极管d3用来产生激光;第一电容c1和第二c2构成滤波电路,对场效应晶体管mos和d3阴极的干扰信号进行滤波;场效应晶体管mos通过自己的导通关断,控制d3发射和终止发光;当驱动芯片x的端子2接收到脉冲信号时,驱动芯片x
的输出端子6和端子7共同输出信号,通过电阻r2输入场效应晶体管mos的门极,使得场效应晶体管mos漏极和源极之间导通,从而使得发光二极管d3导通发光;本激光发射电路整体相对简单,最大程度降低了电路可能收到的电磁干扰而产生误发光或不发光现象的可能;电路主要是基于发光驱动芯片的控制,使激光发射二极管d3产生激光,只要选用合适点频率的发光驱动芯片,便可满足激光发射电路的设计要求,避免了现有激光发射电路的设计中普遍存在的电路复杂和电路性能的不稳定。
[0085]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。