1.本发明属于卫星导航信息处理领域,涉及一种适用于旋转炮弹的卫星导航接收机动态环路跟踪的方法。
背景技术:
2.卫星导航接收机因体积小、成本低已成为旋转炮弹常用的导航设备。炮弹在飞行过程中,存在弹体轴向和切向运动叠加。传统卫星导航接收机应用于炮弹时,面临诸多问题,主要问题如下:1)弹体旋转引起的信号遮挡问题;2)旋转引起的切向运动导致测速误差问题;3)旋转时的动态适应性问题;4)对信号相位的旋转调制效应。
3.目前,解决问题1)~2)的主要技术手段是双天线合成方法,即采用对称安装于弹体表面的两个共形天线,合路形成一个垂直弹轴的全向方向图,使得天线收星不会受旋转影响。同时,将两个共形天线单元并馈,使得天线相位中心设计在弹轴上,理论上消除了切向运动,但实际上,共形天线设计、安装误差、弹体天线安装面公差等因素,共形天线相位中心与弹轴会存在偏差,偏差导致的切向运动难以消除。解决问题3)的主要方法是采用锁频环辅助锁相环设计,通过调整滤波器带宽参数来适应高动态性能,或将旋转调制效应误差笼统地视为噪声,采用纯锁频环设计。前者能够克服轴向大动态导致的环路失锁,同时保证了一定的跟踪精度,但其易受弹体转速影响,环路稳定性与适应性较差;后者环路结构简单、动态适应性较好,但跟踪精度较差。解决问题4)的主要方法是通过地磁传感器或单天线收星预测弹体的转速,并进行旋转调制效应误差补偿,但地磁测量使用制约因素较多,使用维护过程复杂,单天线收星转速估计算法复杂,受制约条件较多。
4.针对旋转高动态弹体应用场景,需要同时解决上述四个问题,以提高环路跟踪稳定性和跟踪精度。
技术实现要素:
5.本发明的目的是提供一种跟踪稳定性好、测速精度高、适用于旋转炮弹的卫星导航接收机动态环路跟踪的方法及装置。
6.为解决上述技术问题,本发明提供了一种适用于旋转炮弹的动态环路跟踪方法,采取技术方案包括如下步骤:
7.步骤1.构建偏差激励和基准伪距环境,对固定俯仰角下的误差输出进行幅值估计,实现在地面对炮弹天线相位中心偏差的估计;
8.步骤2.获取短时内的弹体转速估计值;
9.步骤3.结合在地面估计出的相位中心偏差、弹体转速值,与卫星入射方向的俯仰角和方位角,计算多普勒误差估计值;
10.步骤4.将步骤3获得的多普勒误差估计值补偿到跟踪环路的码频率和载波频率中,实现对旋转调制的误差补偿。
11.根据本发明的又一方面,提供了一种适用于旋转炮弹的动态环路跟踪装置,采取
技术方案如下:
12.所述跟踪装置包括相位中心偏差估计模块、弹体转速估计模块、多普勒误差估计模块和误差补偿补偿模块。
13.所述相位中心偏差估计模块基于构建的偏差激励和基准伪距环境,对固定俯仰角下的误差输出进行幅值估计,实现在地面对炮弹天线相位中心偏差的估计;
14.所述弹体转速估计模块用于获取短时内的弹体转速估计值;
15.所述多普勒误差估计模块利用卡尔曼滤波解算出的卫星入射方向的俯仰角和方位角,结合在地面估计出的相位中心偏差以及弹体转速值,计算出多普勒误差估计值;
16.所述误差补偿补偿模块将获得的多普勒误差估计值补偿到跟踪环路的码频率和载波频率中,实现对旋转调制的误差补偿。
17.本发明技术解决方案是通过人为构造偏差激励条件与基准伪距条件,对固定俯仰角下的误差输出进行幅值估计,从而实现在地面对炮弹天线相位中心偏差的估计;在已知天线相位中心偏差的前提下,利用载波相位鉴别器和码相位鉴别器输出作为卡尔曼滤波器的量测,利用接收机位置、速度和星历作为载波和码nco预测,经滤波后计算出卫星入射方向的俯仰角和方位角。同时,构造弹体转速估计模块,结合在地面估计出的相位中心偏差,并结合转速估计值与卫星入射方向的俯仰角和方位角,从而计算出因天线相位中心偏差引起的多普勒误差估计值,用于多普勒测量值的补偿,从而有效消除了旋转导致的多普勒频率误差,实现接收机动态环路的稳定跟踪,提高了旋转条件下接收机的测速精度。
18.本发明的优点是利用天线相位中心偏差引起的旋转调制误差与卫星信号入射俯仰角和方位角的关系,并采用地面相位中心偏差估计的方式,获取多普勒误差,补偿到跟踪环路中,能够解决旋转时测速误差大的问题。创新性地提出了通过构造偏差激励条件与基准伪距条件,对固定俯仰角下的误差输出进行幅值估计,进而实现在地面进行天线相位中心估计的方法;创新性地提出了采用环路原始参数解算出卫星信号入射角,并结合弹体转速估计,对计算出的多普勒误差进行环路补偿的方法,从根本上突破了采用纯锁频环进行笼统跟踪的方法,有效提升了锁频环辅助锁相环的跟踪精度。
19.本发明考虑了利用环路原始信息和星历、位置等信息进行卡尔曼滤波,利用滤波计算的入射角、估计的转速、地面估计的相位中心偏差等信息,计算多普勒并进行环路补偿。地面可操作性强,算法应用简单,无复杂或运算量巨大的算式,实时性和运算量方面都可保证在dsp或fpga硬件平台上的算法编程实现,即易于工程实现。
附图说明
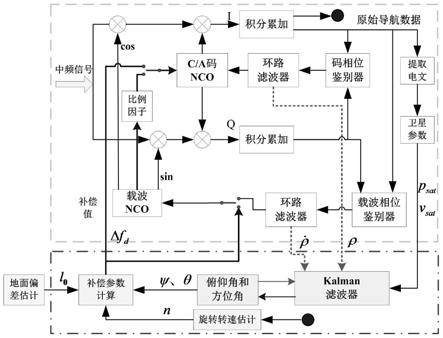
20.图1是本发明提供的一种适用于旋转炮弹的卫星导航接收机动态环路跟踪的方法原理框图;
21.图2是炮弹旋转运动坐标系的示意图;
具体实施方式
22.下面结合附图和实施例对本发明进一步说明。
23.图1是本发明所提出的一种适用于旋转炮弹的卫星导航接收机动态环路跟踪的方法原理框图。图1中,引入了旋转调制导致的多普勒误差估计环节,使环路进行多普勒误差
修正,分为地面偏差估计阶段和飞行实时修正两个阶段实施。具体方法如下:
24.地面偏差估计阶段是在伪距基准已知的条件下,利用偏差激励方法对弹体天线相位中心的偏差l0进行估计,用以为飞行实时修正提供参数要素。天线相位中心偏差主要是由安装误差、安装面公差、天线设计制造误差、与时间相关的材料形变误差等,其中,安装误差、安装面公差、天线设计制造误差等占大部分,而与材料形变误差与时间相关。因此,为了维护和使用方便,地面阶段的偏差估计可在炮弹出厂后只进行一次,后续是否再需开展,可根据炮弹贮存时间灵活确定。
25.飞行实时修正阶段是利用卡尔曼滤波解算出的卫星入射信号的俯仰角θ、方位角ψ和弹体转速n估计值,结合在地面估计出的相位中心偏差l0,从而计算出因天线相位中心偏差引起的多普勒误差估计值δf
d
。将多普勒误差δf
d
引入到跟踪环路的码nco和载波nco中,实现旋转调制的频率误差补偿。
26.在本发明提供的一种实施例中,所述天线相位中心偏差的地面估计包括如下步骤:
27.步骤s1、偏差激励和基准伪距环境构建
28.将旋转炮弹接收机天线随旋转工装固定于已标定的基准点处,待卫星接收机稳定收星定位后,利用某卫星(设编号为i)三维位置,基准点三维坐标,计算得到基准伪距设测量伪距为可以得到测距误差短时间内,该颗卫星入射信号的初始方位角ψ
i
和俯仰角θ
i
变化不大,可视为已知常值。
29.步骤s2、偏差激励
30.开启工装旋转,保持天线于已标定的基准点处,使得旋转炮弹接收机天线随旋转工装进行旋转,时间不超过2分钟。采集每颗参与定位卫星(设参与定位卫星总个数为m)的方位角ψ
i
和俯仰角θ
i
,得到各个卫星的测距误差δl
i
,利用工具对采集的各颗卫星的测距误差δl
i
进行幅值检测,得到幅值
31.步骤s3、天线相位中心有效偏差提取
32.对检测得到的m个幅值测量值经极值处理(去除最大值和最小值)后,对剩余的(m
‑
2)个幅值测量值取均值和均方根l
rms
。
33.若均方根l
rms
小于门限l
thred
,则认为此次偏差激励有效,可以进行有效偏差提取,即提取有效偏差为否则,认为此次偏差激励失败,不能提取。可再次进行偏差激励步骤。
34.在本发明提供的一种实施例中,所述弹体转速估计方法如下:
35.如图1所示,利用跟踪环路i支路的积分累加输出,对输出的离散数字量进行fft(fast fourier transform)频谱分析,以获取短时间内的频率,即旋转转速n。由于弹体转速变化不大,对i支路信息进行滑动fft,以实时更新转速。
36.滑动时间窗口的取值视不同炮弹种类的转速特点来确定,转速变化较小的种类,取4ms~10ms。
37.在本发明提供的一种实施例中,所述卫星信号的入射角估计方法如下:
38.构建卡尔曼滤波,信号跟踪同步后,获得星历、时间和同步参数,经计算后,获得卫
星位置p
sat
、速度v
sat
,将其输入到卡尔曼滤波器作为预测。使用载波相位鉴别器和码相位鉴别器输出的卫星伪距ρ与伪距率作为卡尔曼滤波器的量测。经滤波后计算出接收机本地位置,在利用本地位置与卫星位置,得到卫星入射方向的方位角ψ和俯仰角θ。
39.在本发明提供的一种实施例中,所述多普勒误差补偿值计算方法如下:
40.如图2所示,推算得到旋转炮弹因天线相位中心导致的旋转调制的测距误差为:
41.δl=l
0 cos(2πnt ψ)cos(θ) δξ
ꢀꢀ
(1)
42.式中,l0为天线相位中心偏移量,n为弹体的旋转转速,ψ为卫星入射信号的初始方位角,θ为卫星入射信号的俯仰角,δξ是相位中心变化量引起的测距误差,其是与弹体方位角、俯仰角以及卫星信号载波频率有关的随机误差,理论已有证明δξ对测距误差的影响极小,在工程应用时可以忽略此误差项。
43.对式(1),将δl对时间t求导,可以得到旋转炮弹因天线相位中心变化量导致的旋转调制的测距变化率误差为:
44.δv=
‑
2πnl
0 sin(2πnt ψ)cos(θ) δξ/δt
ꢀꢀ
(2)
45.式中,l0为天线相位中心偏移量,n为弹体的旋转转速,ψ为卫星入射信号的初始方位角,θ为卫星入射信号的俯仰角。
46.式(2)中,δξ/δt是相位中心变化量引起的测距变化率误差,在工程应用时可以忽略此误差项。将式(2)转化为多普勒误差为
[0047][0048]
式中,c为光速,f为卫星信号的载波频率。
[0049]
在本发明提供的一种实施例中,所述多普勒误差的环路补偿方法如下:
[0050]
利用计算的多普勒误差补偿值δf
d
,对跟踪环路的码nco和载波nco进行多普勒误差补偿。实际应用中,考虑到,环路稳定跟踪比测速误差补偿要优先,因此,需要对多普勒误差补偿值δf
d
进行补偿前的限幅处理。
[0051]
限幅处理的幅度限定原则是:1)转速按照理论最大转速的1.2倍;2)天线相位中心最大偏移量为炮弹弹径的5
‰
;3)卫星信号载波频率为实际使用的卫星载波频率。
[0052]
按照上述原则,假设炮弹种类的弹径为r,理论最大转速为p转每秒,则不难得到多普勒误差的幅度限定门限为
[0053][0054]
因此,在实际应用时,若多普勒误差补偿值δf
d
大于门限则不进行误差补偿处理;若不大于门限则进行码跟踪环和载波跟踪环的多普勒误差补偿处理,以实现旋转时测速精度的提高。
[0055]
根据本发明的又一方面,提供了一种适用于旋转炮弹的动态环路跟踪装置,其实施方式如下:
[0056]
所述跟踪装置包括相位中心偏差估计模块、弹体转速估计模块、多普勒误差估计模块和误差补偿补偿模块。
[0057]
所述相位中心偏差估计模块基于构建的偏差激励和基准伪距环境,对固定俯仰角
下的误差输出进行幅值估计,实现在地面对炮弹天线相位中心偏差的估计;
[0058]
所述弹体转速估计模块用于获取短时内的弹体转速估计值;
[0059]
所述多普勒误差估计模块利用卡尔曼滤波解算出的卫星入射方向的俯仰角和方位角,结合在地面估计出的相位中心偏差以及弹体转速值,计算出多普勒误差估计值;
[0060]
所述误差补偿补偿模块将获得的多普勒误差估计值补偿到跟踪环路的码频率和载波频率中,实现对旋转调制的误差补偿。
[0061]
在本发明提供的一种实施例中,所述相位中心偏差估计模块中炮弹天线相位中心偏差的估计方法如下:
[0062]
将旋转炮弹接收机天线随旋转工装固定于已标定的基准点处;
[0063]
待卫星接收机稳定收星定位后,开启工装旋转,保持天线于已标定的基准点处,时间不超过2分钟,采集每颗参与定位卫星的方位角ψ
i
和俯仰角θ
i
,得到各个卫星的测距误差δl
i
;
[0064]
对采集的各颗卫星的测距误差δl
i
进行幅值检测,经极值处理后,取均值和均方根l
rms
,若均方根l
rms
小于门限l
thred
,则认为此次偏差激励有效,进行有效偏差提取,即提取有效偏差为否则,认为此次偏差激励失败,不提取。
[0065]
在本发明提供的一种实施例中,所述弹体转速估计模块中对跟踪环路i支路的积分累加输出的离散数字量进行滑动fft频谱分析,得到短时间内的频率,即旋转转速n。
[0066]
进一步的,滑动时间窗口的取值为4ms~10ms。
[0067]
在本发明提供的一种实施例中,所述多普勒误差估计模块中的多普勒误差估计值为:
[0068][0069]
式中,l0为天线相位中心偏移量,n为弹体的旋转转速,ψ为卫星入射信号的初始方位角,θ为卫星入射信号的俯仰角。
[0070]
在本发明提供的一种实施例中,所述误差补偿补偿模块对多普勒误差补偿值δf
d
进行补偿前的限幅处理,只有多普勒误差的幅度不大于限定门限,才进行码跟踪环和载波跟踪环的多普勒误差补偿处理。
[0071]
限幅处理的幅度限定原则是:1)转速按照理论最大转速的1.2倍;2)天线相位中心最大偏移量为炮弹弹径的5
‰
;3)卫星信号载波频率为实际使用的卫星载波频率。
[0072]
本发明提供的一种适用于旋转炮弹的动态环路跟踪装置的实施例具体可以用于执行上述实施例中的一种适用于旋转炮弹的动态环路跟踪方法的实施例的处理流程,其功能不再赘述。
[0073]
所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。