1.本发明涉及到波源信号定位技术领域,尤其涉及到一种三维定位方法 及系统。
背景技术:
2.声呐的应用已经很广泛,但其几乎是主动式二维定位的应用,难以满 足航空航天、人工智能、地震监测、军工定位等领域的需求。本发明致力 于提供一种三维定位方法及系统,可应用于航空航天的飞行器定位、人工 智能的目标源定位、地震监测的震源定位、军工邻域的火力源定位中。
技术实现要素:
3.本发明致力于提供一种三维定位方法及系统,可应用于航空航天的飞 行器定位、人工智能的目标源定位、地震监测的震源定位、军工邻域的火 力源定位中。
4.本发明是通过以下技术方案实现:
5.本发明提供了一种三维定位方法,该三维定位方法包括如下步骤:
6.步骤1:构建球体接收装置。构建的所述球体接收装置包括多个能反应 自身坐标的信号接收器。在多个信号接收器中,其中一个信号接收器布置 在所述球体接收装置的球心位置,其余的信号接收器分布在所述球体接收 装置的表面。
7.步骤2:当以目标信号源为球心形成的球体信号波通过所述球体接收装 置的球心时,与所述球体接收装置相交形成唯一的圆形,所述球体接收装 置表面的信号接收器有被触发者则输出自身的坐标值。
8.步骤3:以所述球体接收装置的球心为原点建立空间三维坐标系,通过 收集以目标信号源为球心形成的球体信号波与所述球体接收装置相交形成 的唯一圆形上的坐标,来确定目标信号源的坐标。
9.在上述步骤3中,所述球体接收装置的球心设定为原点o;o为已知 量。目标信号源为球心形成的球体信号波所处的球心设定为c,其与所述 球体接收装置相交形成的唯一圆形上的其中距离最大的两点分别设定为a 和b。其中,c为未知量,a和b均为信号接收器的输出为已知量。
10.连接ao、ab及co,将ab的中点命名为e,将ao的中点命名为d, 并连接cd;
11.其中,a、b两点坐标是已知量,分别命名为a(x1,y1,z1),b(x2,y2,z2),
12.则
[0013][0014][0015]
因为e为ab中点,所以ac=bc,ce
⊥
ab,即∠aeo=90
°
;
[0016]
因为d为ao中点,所以ac=oc,cd
⊥
ao,即∠cdo=90
°
;
[0017]
在δcdo与δaeo中,∠cdo=∠aeo=90
°
,∠cod=∠∠aoe,所以 δcdo与δaeo为相似三角形,所以co/do=ao/eo,即co=do
×
ao
÷ꢀ
eo;co为目标信号源的距离;
[0018]
则为方向向量;
[0019]
设
[0020]
则目标信号源坐标为
[0021]
在本实施方案中,方向向量oe的计算方法如下:
[0022]
设所述接收装置球体的半径为r,所述信号接收器的半径为r
′
,a点误 差为r
′1,r
′1≤2r
′
,b点误差为r
′2,r
′2≤2r
′
,所述信号接收器的分布数量为w;
[0023]
所述接收装置球体表面积:s=4π,r2[0024]
所述信号接收器占用面积:s
′
=π,
[0025]
故所述接收装置球体表面的信号接收器的分布数量w取 整数;
[0026]
目标信号源距离为co=do
×
ao
÷
eo,
[0027]
换算后得到
[0028]
方向向量oe为
[0029]
在系统参入误差计算后得到的目标信号源距离为:
[0030][0031]
系统参入误差计算后得到的方向向量为:
[0032][0033]
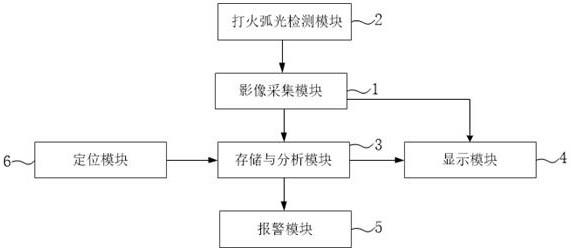
本发明还提供了一种三维定位系统,包括:
[0034]
球体接收装置,所述球体接收装置包括多个能反应自身坐标的信号接 收器;多个信号接收器中,其中一个信号接收器布置在所述球体接收装置 的球心位置,其余的信号接收器分布在所述球体接收装置的表面。所述球 体接收装置用于接收信号波,使以目标信号源为球心形成的球体信号波与 所述球体接收装置相交形成唯一圆形上的坐标被收集。
[0035]
三维定位装置,所述三维定位装置用于以所述球体接收装置的球心为 原点建立空间三维坐标系,并通过以目标信号源为球心形成的球体信号波 与所述球体接收装置相交形成的唯一圆形上的坐标,来确定目标信号源的 坐标。
[0036]
所述三维定位装置还用于在以目标信号源为球心形成的球体信号波传 到所述球体接收装置的球心时信号收集闭锁,所述球体接收装置表面的信 号接收器有被触发者则输出自身的信号点坐标值。
[0037]
与现有技术相比,本发明的有益效果是:本发明能满足航空航天、人 工智能、地震
监测、军工定位等领域的需求,本发明被动式接收目标信号 源的波源信号,相对于主动式接收方式更加节能,同时还能避免造成声波 污染。
附图说明
[0038]
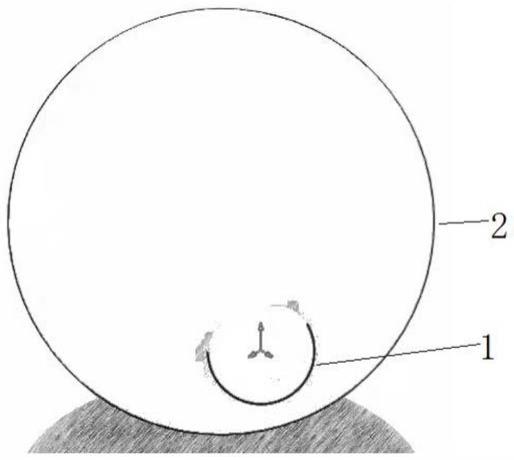
图1是本发明实施例提供的球体接收装置和球体信号波的位置关系图;
[0039]
图2是本发明实施例提供的图1的剖视图;
[0040]
图3是本发明实施例提供的图2的正视图;
[0041]
图4是本发明实施例提供的球体信号波轮廓删除后的点间连线图。
具体实施方式
[0042]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进 行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例, 而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没 有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的 范围。
[0043]
本发明实施例提供了一种三维定位方法,该三维定位方法包括如下步 骤:
[0044]
步骤1:构建球体接收装置;构建的球体接收装置包括多个能反应自身 坐标的信号接收器;在多个信号接收器中,其中一个信号接收器布置在所 述球体接收装置的球心位置,其余的信号接收器分布在所述球体接收装置 的表面。
[0045]
步骤2:当以目标信号源为球心形成的球体信号波通过球体接收装置的 球心时,与球体接收装置相交形成唯一的圆形,球体接收装置表面的信号 接收器有被触发者则输出自身的坐标值。
[0046]
步骤3:以球体接收装置的球心为原点建立空间三维坐标系,通过收集 以目标信号源为球心形成的球体信号波与球体接收装置相交形成的唯一圆 形上的坐标,来确定目标信号源的坐标。
[0047]
参考图1,我们分别对球体接收装置和以目标信号源为球心形成的球体 信号波进行标记,具体分别为:球体接收装置1,球体信号波2。参考图2, 我们对图1中示出的球体接收装置1和球体信号波2剖开,从图2不难看 出,当以目标信号源为球心形成的球体信号波2通过球体接收装置1的球 心时,与球体接收装置1相交形成唯一的圆形。即在球体接收装置1不变 而以目标信号源为球心形成的球体信号波2通过球体接收装置1的球心变 化时,球体接收装置1和以目标信号源为球心形成的球体信号波2两球的 交线是圆形。并且无论以目标信号源为球心形成的球体信号波2如何变化, 交线形成的圆形是同时变化的。球体接收装置1位置确定的前提下,我们 可以从球体接收装置1表面的已知量中确定交线形成的圆形,以此便能确 以目标信号源为球心形成的球体信号波2的球心及半径,球体信号波2的 球心即为目标信号源。
[0048]
继续参考图2并结合图3,我们将球体接收装置1的球心设定为原点o。 由于球体接收装置1的位置不变,通过球体接收装置1球心位置的信号接 收器可以得知o点的位置坐标,因此o为已知量。以目标信号源为球心形 成的球体信号波2所处的球心设定为c,c代表目标信号源所处的位置,c 为未知量。而以目标信号源为球心形成的球体信号波2和球体接收装置1 相交形成的唯一圆形上的各点的位置坐标,我们通过球体接收装置1表面 的信号
接收器可以得知各点的位置坐标,位置坐标中我们选择距离最大的 两点分别设定为a和b,a和b均为信号接收器的输出为已知量。相交形 成的圆形上的各点选择其中距离最大的两点设为a、b时,可将收集的坐标 值两两相减后求和,在最大值中取一对,即可得到a、b两点。
[0049]
结合图4,连接ao、ab及co,将ab的中点命名为e,将ao的中 点命名为d,并连接cd。
[0050]
其中,a、b两点坐标是已知量,分别命名为a(x1,y1,z1),b(x2,y2,z2),
[0051]
则
[0052][0053][0054]
因为e为ab中点,所以ac=bc,ce
⊥
ab,即∠aeo=90
°
;
[0055]
因为d为ao中点,所以ac=oc,cd
⊥
ao,即∠cdo=90
°
;
[0056]
在δcdo与δaeo中,∠cdo=∠aeo=90
°
,∠cod=∠∠aoe,所以 δcdo与δaeo为相似三角形,所以co/do=ao/eo,即co=do
×
ao
÷ꢀ
eo;co为目标信号源的距离,即目标信号源到球体接收装置1球心的距 离;
[0057]
则为方向向量;
[0058]
设
[0059]
则目标信号源坐标为
[0060]
在上述计算中,方向向量oe的计算方法如下:
[0061]
设接收装置球体1的半径为r,信号接收器的半径为r
′
,a点误差为r
′1, r
′1≤2r
′
,b点误差为r
′2,r
′2≤2r
′
,信号接收器的分布数量设为w;
[0062]
接收装置球体1表面积:s=4π,r2[0063]
信号接收器占用面积:s
′
=π,
[0064]
因此接收装置球体1表面的信号接收器的分布数量w取 整数。
[0065]
通过上述公式进行数量分析可知:接收装置球体1半径越大,信号接 收器所需数量越多;信号接收器半径越大,接收装置球体1表面分布的信 号接收器数量越少。
[0066]
根据上述提到的相似三角形推导原理,我们可以得出:
[0067]
目标信号源距离为co=do
×
ao
÷
eo,
[0068]
换算后得到
[0069]
方向向量oe为
[0070]
在系统参入误差计算后得到的目标信号源距离为:
[0071][0072]
系统参入误差计算后得到的方向向量为:
[0073][0074]
通过上述公式进行误差分析可知:误差r
′1与r
′2为同向误差时将增大方向 误差,误差r
′1与r
′2为反向误差时将减小方向误差。且由于r
′1≤2r
′
,r
′2≤2r
′
, 所以r
′1 r
′2≤4r
′
,由此可知:信号接收器半径r
′
越小,方向向量误差越小。
[0075]
本发明还提供了一种三维定位系统,包括球体接收装置和三维定位装 置。其中,球体接收装置包括多个能反应自身坐标的信号接收器;多个信 号接收器中,其中一个信号接收器布置在球体接收装置的球心位置,其余 的信号接收器分布在球体接收装置的表面。球体接收装置用于接收信号波, 使以目标信号源为球心形成的球体信号波与球体接收装置相交形成唯一圆 形上的坐标被收集。三维定位装置用于以球体接收装置的球心为原点建立 空间三维坐标系,并通过以目标信号源为球心形成的球体信号波与球体接 收装置相交形成的唯一圆形上的坐标,依据上述三维定位方法,来确定目 标信号源的坐标。
[0076]
上述三维定位装置还用于在以目标信号源为球心形成的球体信号波传 到球体接收装置的球心时信号收集闭锁,球体接收装置表面的信号接收器 有被触发者则输出自身的信号点坐标值。借由上述三维定位系统,通过三 维定位方法,被动接收目标信号源的单波源信号,经三维定位方法计算后 得出目标信号源的三维坐标位置,可应用于航空航天领域、人工智能领域、 地震监测领域以及军工定位领域的波源三维定位。
[0077]
与现有技术相比,本发明能满足航空航天、人工智能、地震监测、军 工定位等领域的需求,本发明被动式接收目标信号源的波源信号,相对于 主动式接收方式更加节能,同时还能避免造成声波污染。
[0078]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员 而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例 进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等 同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。