1.本发明涉及无人驾驶技术领域,具体涉及一种基于固态面阵激光雷达的宽视角校正环境感知方法及系统。
背景技术:
2.随着无人驾驶商业化普及,其在各个领域都有很多的应用,例如面向个人使用的无人驾驶汽车、面向大众服务的智能服务机器人、无人驾驶环卫车以及园区物流车等。激光雷达作为无人驾驶的眼睛,其主要的功能是通过测量光传播到物体并反射所需要的时间,来提供汽车周围环境的3d点云图,从而能够帮助车辆很好地识别周围环境。
3.面向大众服务的无人驾驶设备如园区的物流车具有工作环境较为简单,行驶速度要求不高以及小型化等特点。而传统的机械式激光雷达机械结构体积庞大且价格昂贵,无法满足园区物流车的应用需求。固态面阵激光雷达具有体积小、抗干扰能力强、价格低廉等优势,广泛应用于小型无人驾驶设备。然而固态面阵激光雷达由于是面阵激光雷达,也同时存在着视场角小,探测距离近等缺陷。
技术实现要素:
4.本发明的目的在于提供一种基于固态面阵激光雷达的宽视角校正环境感知方法及系统,用以解决现有技术中的固态面阵激光雷达存在着视场角小、探测距离近的问题。
5.本发明一方面提供了一种基于固态面阵激光雷达的宽视角校正环境感知方法,包括如下步骤:
6.(1)光源驱动电路驱动激光发射器发射激光束;
7.(2)激光束经发射端光学模块后照射到目标物体表面并反射回波;
8.(3)回波经过接收端光学模块扩展视场角后被光电探测阵列接收;
9.(4)光电探测阵列把接收的光强转化为光电流;
10.(5)光电流经前置模拟放大模块自适应动态法放大并装换为电压信号;
11.(6)电压信号经过模数转化器转化为数字信号;
12.(7)数字信号在后端数字处理器中进行处理,通过畸变校正算法对宽视场角光学成像信号进行校正,以减小像的误差;
13.(8)处理后的数据经过数据收发器存入数据存储器。
14.进一步的,所述回波经过接收端光学模块扩展视场角具体为:回波首先经过接收端光学模块中的双胶合透镜组,初步减小像差,紧接着经过正透镜组,形成远方物心,以减小边缘视场光线在每个面上的入射出射角度,以达到扩展视场角的效果,最后经过窄带滤波片进行滤波,保证入射波长的激光具有高透过率。
15.进一步的,所述光电流经前置模拟放大模块自适应动态法放大并装换为电压信号具体为:光电流经过前置跨阻放大器转化为电压信号,经过比较器与参考电压进行比较,比较后产生的反馈信号发送至增益可调器中,从而调节前置跨阻放大器的增益。
16.进一步的,所述激光发射器发射激光束的波长为850nm
‑
950nm。
17.进一步的,光电探测阵列的探测器为雪崩光电二极管(apd)探测器。
18.进一步的,所以数字信号在后端数字处理器中进行处理中,通过数字专用集成电路(asic)实现畸变校正算法,对宽视场角光学成像信号进行校正。
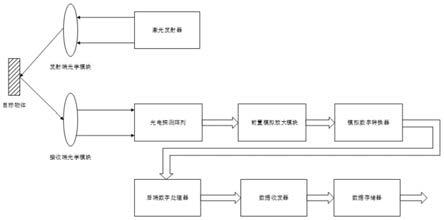
19.本发明另一方面提供一种基于固态面阵激光雷达的宽视角校正环境感知系统,包括激光发射器、发射端光学模块、接收端光学模块、光电探测阵列、前置模拟放大器、模拟数字转换器、后端数字处理器、数据收发器和数据存储器;
20.所述激光发射器用于发射激光束,所述发射端光学模块将激光束照射到目标物体上;
21.所述接收端光学模块用于扩展目标物体反射回波的视场角;
22.所述光电探测阵列接收用于将接受的光强转化为光电流;
23.所述前置模拟放大模块用于将光电流放大并转化为电压信号;
24.所述模数转化器用于将电压信号转化为数字信号;
25.所述后端数字处理器用于将数字信号进行处理,通过畸变校正算法对宽视场角光学成像信号进行校正;
26.所述数据存储器用于存储处理后的数据。
27.进一步的,所述接收端光学模块包括双胶合镜组、正头镜组和窄带滤光片,所述双胶合镜组用于减少像差,所述正头镜组用于扩展视场角,所述窄带滤光片用于提高入射波长激光的透过率。
28.进一步的,所述光电探测阵列包括m*n个光电探测器,将m*n个光电探测器所形成的激光雷达面阵分成k个不同探测区域,并将像元所探测的光电流分区域读出。
29.进一步的,所述前置模拟放大模块包括前置跨阻放大器、比较器和增益可调器,所述跨阻放大器用于将光电流转化为电压信号并基于增益调节器进行放大,所述比较器用于将电压信号与参考电压进行比较并将输出反馈信号,所述增益调节器用于根据反馈信号调节前置跨阻放大器的增益。
30.采用上述本发明技术方案的有益效果是:
31.本发明通过在激光雷达接收端增加接收端光学模块扩展视场角,增加前置模拟放大模块自适应动态放大信号,并增加后端数字处理器对宽视场角光学成像信号进行校正,在不损失探测精度的前提下提高了面阵激光雷达的视场角;
32.本发明解决现有基于固态面阵激光雷达无人驾驶视场角小的缺陷,在以无人驾驶园区物流车为例的小型无人驾驶设备领域有显著优势。
附图说明
33.图1为本发明基于固态面阵激光雷达的宽视角校正环境感知系统结构示意图;
34.图2为本发明接收端光学模块结构示意图;
35.图3为本发明前置模拟放大模块示意图;
36.图4为本发明前置模拟放大模块电路图;
37.图5为本发明基于固态面阵激光雷达的宽视角校正环境感知方法流程图。
具体实施方式
38.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
39.本实施例为一种基于固态面阵激光雷达的宽视角校正环境感知系统,包括激光发射器、发射端光学模块、接收端光学模块、光电探测阵列、前置模拟放大器、模拟数字转换器、后端数字处理器、数据收发器和数据存储器,如图1所示;
40.所述激光发射器用于发射激光束,所述发射端光学模块将激光束照射到目标物体上;所述接收端光学模块用于扩展目标物体反射回波的视场角;所述光电探测阵列接收用于将接受的光强转化为光电流;所述前置模拟放大模块用于将光电流放大并转化为电压信号;所述模数转化器用于将电压信号转化为数字信号;所述后端数字处理器用于将数字信号进行处理,通过畸变校正算法对宽视场角光学成像信号进行校正;所述数据存储器用于存储处理后的数据。
41.具体的,所述接收端光学模块包括双胶合镜组、正头镜组和窄带滤光片,如图2所示,所述双胶合镜组用于减少像差,所述正头镜组用于扩展视场角,所述窄带滤光片用于提高入射波长激光的透过率。
42.所述光电探测阵列包括m*n个光电探测器,光电探测阵列的探测器为雪崩光电二极管(apd)探测器,将m*n个光电探测器所形成的激光雷达面阵分成k个不同探测区域,并将像元所探测的光电流分区域读出,该实施例中,考虑到宽视场角光学系统所带来的成像畸变和光强衰弱等非理想因素,将160
×
160个apd光电探测器所形成的激光雷达面阵分成5个不同探测区域,并将像元所探测的光电流按照上区域、左区域、中区域、右区域、下区域5个分区域通道读出。
43.具体的,所述前置模拟放大模块包括前置跨阻放大器、比较器和增益可调器,如图3所示,所述跨阻放大器用于将光电流转化为电压信号并基于增益调节器进行放大,所述比较器用于将电压信号与参考电压进行比较并将输出反馈信号,所述增益调节器用于根据反馈信号调节前置跨阻放大器的增益,前置模拟放大模块电路图如图4所示。
44.本发明另一实施例为基于固态面阵激光雷达的宽视角校正环境感知方法,如图5所示,包括如下步骤:
45.(1)光源驱动电路驱动垂直腔面激光发射器(vcsel)发射激光束,所述激光发射器发射激光束的波长为850nm
‑
950nm;
46.(2)激光束经发射端光学模块后照射到目标物体表面并反射回波;
47.(3)回波首先经过接收端光学模块中的双胶合透镜组,初步减小像差,紧接着经过正透镜组,形成远方物心,以减小边缘视场光线在每个面上的入射出射角度,以达到扩展视场角(100
°×
60
°
)的效果,最后经过窄带滤波片进行滤波,保证入射波长(850nm~900nm)的激光具有高透过率,最后出射光被光电探测阵列接收;
48.(4)光电探测阵列把接收的光强转化为光电流,将像元所探测的光电流按照上区域、左区域、中区域、右区域、下区域5个通道读出;
49.(5)光电流经前置模拟放大模块自适应动态法放大并装换为电压信号,对于每一个读出通道,该区域的像元所产生的光电流通过时分复用的方式被前置跨阻放大器转化为
电压信号,经过比较器与参考电压进行比较,比较后产生了的反馈信号发送至增益可调器中,从而调节前置跨阻放大器的增益,自适应的方式调整跨阻放大器的动态范围,以解决宽视场角光学系统所带来的不同区域光强衰弱不一致的问题,如图4所示;
50.(6)电压信号经过模数转化器转化为数字信号;
51.(7)数字信号在后端数字处理器中进行处理,通过数字专用集成电路(asic)实现畸变校正算法,通过畸变校正算法对宽视场角光学成像信号进行校正,以减小像的误差;
52.(8)处理后的数据经过数据收发器存入数据存储器。
53.综上,本发明通过在激光雷达接收端增加接收端光学模块扩展视场角,增加前置模拟放大模块自适应动态放大信号,并增加后端数字处理器对宽视场角光学成像信号进行校正,在不损失探测精度的前提下提高了面阵激光雷达的视场角;本发明解决现有基于固态面阵激光雷达无人驾驶视场角小的缺陷,在以无人驾驶园区物流车为例的小型无人驾驶设备领域有显著优势。
54.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。