ct室远程控制操作系统及方法
技术领域
1.本发明属于医疗设备领域,尤其涉及一种针远程操作系统及方法。
背景技术:
2.影像学检查是诊断及评估新型冠状(2019
‑
ncov)病毒感染的必要手段,发热病人几乎都要至放射科进行胸片或胸片ct检查。放射技师作为影像检查的排头兵,需要与患者直接接触,存在明显的暴露风险。而且已经有放射科技师和医师感染2019
‑
ncov病毒的案例。
3.对患者进行胸片ct检查时,最容易与患者接触的时候是在患者躺下,医生对其进行定位的那段时间,因此需要在这段时间避免与患者近距离接触。在未知患者是否感染新型冠状病毒时,为了规避风险,有人提出了隔室操作的概念,但是目前使用的大多数的ct设备必须要求操作者进入机房对患者进行摆位及对机器进行清零操作,因此需要一种能够远程控制机器清零及患者摆位的系统。
4.如中国专利申请202010281626.x公开了一种用于ct系统的远程摆位系统,其主要由监测装置和摆位控制装置构成,监测装置包括用于监控患者摆位情况的摆位探头器和用于接收摆位探头器获取的图像并进行实时显示的显示装置;摆位控制装置包括设置在操作室内的远程摆位盒,控制ct系统中的扫描床运动的运动控制系统,以及连接远程摆位盒和运动控制系统的通信系统;远程摆位盒主要由盒体、多个控制按钮、将控制按钮的动作转换成控制信号的控制电路构成,控制信号经通信系统发送至运动控制系统。但是该发明存在以下缺陷:只能对扫描床进行远程摆位控制,无法实现其他的远程遥控效果。
5.又如中国专利申请202020324878.1公开了一种ct设备的远程控制系统,包括:ct主控计算机、按键控制器、按键触发器、按键控制盒和远程计算机;按键控制器与远程计算机信号连接,按键控制器的输出端与按键触发器的控制端相连,远程计算机通过因特网与ct主控计算机远程网络连接;按键控制盒与ct设备信号连接,用于控制ct设备的检测位置的移动或转动,以及x射线触发;ct主控计算机与ct设备信号连接,用于实时获取ct设备的运行数据和检测数据;按键控制器用于接收远程计算机上发送的控制指令,并通过按键触发器控制按键控制盒面板上相应按键的按下或松开。但是该发明存在以下缺陷:仅能实现对扫描室的ct机的功能按键的控制,无法对ct机进行摆位等遥控操作。
6.因此,提供一种在不近距离接触情况下便可完成胸部ct扫描的ct室远程控制操作系统及方法成为业内急需解决的问题。
技术实现要素:
7.本发明的目的是提供一种ct室远程控制操作系统及方法,其不仅使得医护人员能够在操作室内方便地控制患者摆位,避免医护人员与患者的近距离接触,还可以远程控制ct机的操作,提高扫描效率。
8.本发明的第一个目的在于提供一种ct室远程控制操作系统,包括:设置有ct机的
扫描室及进行影像拍摄的操作室,扫描室与操作室通信连接,扫描室内设置有数控机器人及若干个vr摄像头,操作室内设置有vr控制装置,其中,ct机的扫描腔内设置有至少三个vr摄像头,扫描室至少于顶壁四角分别设置有一个vr摄像头,数控机器人设置有左机械手及右机械手;vr控制装置包括:vr眼镜及控制手柄,vr眼镜与每一个vr摄像头通信连接以实时显示扫描室内的实时场景,控制手柄与数控机器人通信连接以控制数控机器人的行为动作。
9.优选地,ct机为ge16排ct或ge540ct。
10.优选地,ct机的机身操作面板上设有清零键、上升键、下降键、开始扫描键以及开始检查键。
11.可选择地,控制手柄设置有:移动控制单元、手臂控制单元、以及按键启动单元,移动控制单元用于控制数控机器人在扫描室内进行移动;手臂控制单元用于控制数控机器人的左机械手及右机械手的动作;按键启动单元用于控制数控机器人点击按压ct机上的按键。
12.可选择地,移动单元设置有:向前移动子单元、向后移动子单元、向左移动子单元、以及向后移动子单元。
13.可选择地,手臂单元设置有:左手升高子单元、左手下降子单元、左手按压子单元、右手升高子单元、右手下降子单元以及右手按压子单元。可选择地,手臂单元可进一步设置有:左手回撤子单元以及右手回撤子单元,以便在按压操作完成后,启动左手回撤子单元或右手回撤子单元,使得左机械手或右机械手撤回至按压操作前的位置。
14.可选择地,控制手柄还包括:支架摆位单元及定位启动单元;其中,支架摆位单元用于控制数控机器人将头部支架放置于扫描床的设定位置处;定位启动单元用于控制数控机器人启动ct机的内定位线指示灯。
15.可选择地,还包括对讲装置,对讲装置包括设置于操作室的对讲单元及设置于扫描室的扩音单元,对讲单元与扩音单元通信连接,以实现声音指令的传输及播放。
16.本发明的第二个目的在于提供一种ct室远程控制操作方法,其包括如下步骤:(1)、通过控制数控机器人进行ct机扫描前的准备工作,将ct机的扫描床停留于初始位;(2)、待检查对象就位于扫描床的设定位置处后,控制数控机器人启动开始检查键,ct机将检查对象带到扫描位,完成扫描检查;(3)、待检查对象完成扫描检查后,控制数控机器人启动ct机的开始扫描键,将扫描床退出至原始位。
17.可选择地,步骤(1)包括:(1
‑
1)、控制数控机器人将头部支架放置于扫描床的设定位置处;(1
‑
2)、控制数控机器人启动ct机的内定位线指示灯后,启动ct机的清零键;(1
‑
3)、于控制室内录入检查对象信息,选定ct扫描方式;以及(1
‑
4)、控制数控机器人启动ct机的开始扫描键。
18.可选择地,在步骤(1
‑
1)中,扫描线定位于头部支架偏床方向5~8厘米处,水平线定位于头部支架下二分之一处。
19.本发明的有益效果是:(1)、可有效避免医生接触疑似感染患者的风险,在不进入机房的前提下轻松应对疑似感染患者,有效避免了医患之间交叉感染,极大地提高了医护人员的工作安全性;(2)、可以同时远程遥控患者的摆位效果及远程遥控、ct机的扫描,使得在单人操作情况下工作效率提高50%以上。
附图说明
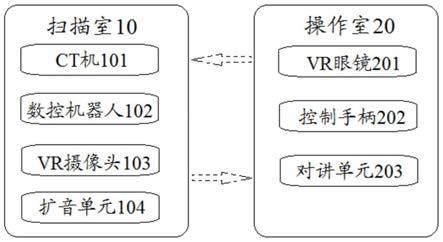
20.图1示出了本发明的ct室远程控制操作系统的结构示意图。
21.图2示出了本发明的控制手柄的结构示意图。
22.图3示出了本发明的ct室远程控制操作方法的步骤流程图。
具体实施方式
23.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
24.作为一种非限制性实施方式,如图1所示,本发明提供的ct室远程控制操作系统包括:扫描室10及操作室20,扫描室10内设有ct机101,医生则在操作室20进行ct影像拍摄,扫描室10与操作室20通信连接。
25.在该非限制性实施方式中,扫描室10内还设置有数控机器人102,数控机器人102设置有左机械手及右机械手,从而实现对ct机的操控及帮助患者摆位。在ct机101的扫描腔内设置有三个vr摄像头103,从而便于在患者于扫描过程中对其进行远程监控,同时在扫描室10的顶壁四角也分别设置一个vr摄像头103,实现了对整个扫描室10的远程监控。
26.操作室20内设置有vr控制装置,vr控制装置包括vr眼镜201及控制手柄202,vr眼镜201与每一个vr摄像头103通信连接,从而可以实时观察到扫描室10内的实时场景,控制手柄202与数控机器人102通信连接,由此来控制数控机器人的行为动作。
27.通过vr摄像头103及vr眼镜201的配合,使得在操作室的医生可以清楚真实地观察到扫描室的情况,再利用控制手柄202来控制机器人102的行为动作,完成对ct机的操作,从而避免了医生与检查者/患者的直接接触。
28.作为另一种非限制性实施方式,如图2所示,控制手柄202设置有:移动控制单元2021、手臂控制单元2022、按键启动单元2023、支架摆位单元2024、以及定位启动单元2025。
29.移动控制单元2021用于控制数控机器人在扫描室内进行移动,其设有:向前移动子单元20211、向后移动子单元20212、向左移动子单元20213、以及向后移动子单元20214。
30.手臂控制单元2022用于控制数控机器人的左机械手及右机械手的动作,其设有:左手升高子单元20221、左手下降子单元20222、左手按压子单元20223、右手升高子单元20224、右手下降子单元20225以及右手按压子单元20226。
31.按键启动单元2023用于控制数控机器人102点击按压ct机上的按键,比如清零键、控制扫描床高低的上升键及下降键。
32.支架摆位单元2024用于控制数控机器人将头部支架放置于扫描床的设定位置处。
33.定位启动单元2025用于控制数控机器人启动ct机的内定位线指示灯。
34.为了便于医生与检查者/患者沟通,系统还设有对讲装置,对讲装置包括设置于操作室20的对讲单元203及设置于扫描室10的扩音单元104,对讲单元203与扩音单元104通信连接,从而使得在操作室20的医生通过对讲单元203对在扫描室10中的检查者/患者发出相应的指令,再通过扩音单元104播放。
35.本发明还提供了一种ct室远程控制操作方法,如图3所示,在步骤s1中,通过控制数控机器人进行ct机扫描前的准备工作,将ct机的扫描床停留于初始位。具体来讲,首先,
利用支架摆位单元2024控制数控机器人102将头部支架放置于扫描床的设定位置处,然后进床,利用定位启动单元2025控制数控机器人102启动ct机的内定位线指示灯,为了提高扫描效果,扫描线定位于头部支架偏床方向5厘米处,水平线定位于头部支架下二分之一处,随后在vr摄像头103的拍摄下,使用vr眼镜201,通过控制移动控制单元2021使得数控机器人102移动至ct机的操作面板处,再利用手臂控制单元2022,抬起数控机器人102的左机械手/右机械手,对准清零键,使用按键启动单元2023按压清零键,使得ct机的数据记录处于初始态。接着,在控制室内的医生录入检查者/患者的信息,选定胸部ct扫描方式,然后再在vr眼镜201及vr摄像头103的协同作用下,再通过移动控制单元2021、手臂控制单元2022及按键启动单元2023,控制数控机器人启动ct机的开始扫描键,将扫描床退出至原始位,并记录机架上面的数字。
36.接着,在步骤s2中,通过对讲装置告知检查者/患者躺在扫描床上,头部放在头部之间里面,手臂交叉或放于身体两侧,就位于扫描床的设定位置处后,控制数控机器人启动开始检查键,扫描床将检查者/患者带至扫描位,完成扫描检查。
37.最后,在步骤s3中,待检查者/患者完成扫描检查后,控制数控机器人启动ct机的开始扫描键,将扫描床退出至原始位,检查者/患者便可离开扫描床,退出扫描室。此时,位于操作室的医生进行后续的数据记录等相关操作。
38.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
39.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。