1.本技术涉及终端配件领域,尤其涉及一种转动机构、支撑装置和移动终端。
背景技术:
2.现有的移动终端中,基本上都采用转动机构来实现展开和盖合。然而,由于电子设备等被支撑物的重量较大,往往需要采用阻尼系数较大的转动机构来对抗被支撑物的重量。阻尼系数越大,使用者需要靠双手才能展开移动终端,大大降低了用户的使用体验。
技术实现要素:
3.本技术提供一种转动机构、支撑装置和移动终端,可实现对移动终端的恒力展开,使用者可单手展开移动终端,提升了用户的使用体验。
4.第一方面,本技术提供一种转动机构,包括固定架、转动轴、导轨架、第一滑块、第二滑块、第一滑杆、第二滑杆、第一连杆和第二连杆。
5.转动轴与固定架转动连接。转动轴设有第一滑槽和第二滑槽,第一滑槽和第二滑槽沿x轴方向间隔排布。导轨架位于转动轴一侧,且与第一滑槽和第二滑槽相对设置。
6.第一滑块和第二滑块均滑动安装于导轨架,第一滑块的滑动臂滑动安装于第一滑槽,第二滑块的滑动臂滑动安装于第二滑槽。
7.第一滑杆和第二滑杆均滑动安装于导轨架,第一滑杆位于第一滑块远离第二滑块的一侧,第二滑杆位于第二滑块远离第一滑块的一侧。
8.第一连杆连接于第一滑块和第一滑杆之间,第二连杆连接于第二滑块和第二滑杆之间。
9.其中,沿逆时针方向上,第一滑槽和第二滑槽之间的间距逐渐增大。
10.转动轴相对固定架逆时针旋转时,第一滑块的滑动臂在第一滑槽内滑动,且第二滑块的滑动臂在第二滑槽内滑动,使第一滑块和第二滑块均相对导轨架沿x轴方向滑动以彼此远离,第一连杆在第一滑块的带动下带动第一滑杆相对导轨架沿y轴正方向滑动,第二连杆在第二滑块的带动下带动第二滑杆相对导轨架沿y轴正方向滑动。
11.转动轴相对固定架顺时针旋转时,第一滑块的滑动臂在第一滑槽内滑动,且第二滑块的滑动臂在第二滑槽内滑动,使第一滑块和第二滑块均相对导轨架沿x轴方向滑动以彼此靠近,第一连杆在第一滑块的带动下带动第一滑杆相对导轨架沿y轴负方向滑动,第二连杆在第二滑块的带动下带动第二滑杆相对导轨架沿y轴负方向滑动。
12.其中,本技术中,移动终端的宽度方向为x轴方向,移动终端的长度方向为y轴方向,移动终端的厚度方向为z轴方向,x轴方向、y轴方向和z轴方向两两相互垂直。
13.本技术所示转动机构中,转动轴相对固定架转动时,第一滑杆和第二滑杆相对导轨架沿y轴方向非线性滑动,第一滑杆和第二滑杆与导轨架之间产生非线性的摩擦阻尼力。在转动机构用于移动终端时,电子设备和支撑架的重量产生的重量阻尼力小于或等于摩擦阻尼力,且重量阻尼力与摩擦阻尼力之间的差值为恒定值,使用者在展开或盖合移动终端
的过程中不会存在阻尼感,可恒力展开或盖合移动终端,实现对移动终端的恒力展开或盖合,提高使用者的使用体验。
14.此外,第一滑杆和第二滑杆与导轨架之间的非线性阻尼可有效增加转动轴相对固定架转动时的阻尼,有助于转动轴相对固定架转动时在任意角度的固定。在转动机构用于移动终端时,有助于实现支撑装置对电子设备在任意角度的有效支撑。
15.一种实施方式中,转动机构还包括固定轴,固定轴固定连接于固定架。转动轴套设于固定轴的外表面,以实现与转动架之间的转动连接。
16.一种实施方式中,转动机构还包括第一阻尼件,第一阻尼件连接于转动轴和固定轴之间,以增加转动轴相对固定架转动时的阻尼,有助于转动轴相对固定架转动时在任意角度的固定,以在转动机构用于移动终端时,有助于实现支撑装置对电子设备在任意角度的有效支撑。
17.一种实施方式中,导轨架设有第一导轨,第一导轨沿x轴方向延伸。第一滑块和第二滑块均滑动安装于第一导轨。即,第一滑块和第二滑块均安装于第一导轨,且可在第一导轨内相对导轨架沿x轴方向滑动。
18.一种实施方式中,导轨架设有第二导轨和第三导轨,第二导轨和第三导轨分别位于第一导轨的相对两侧,第二导轨和第三导轨均沿y轴方向延伸。第一滑杆滑动安装于第二导轨。即,第一滑杆安装于第二导轨,且可在第二导轨内相对导轨架沿y轴方向滑动。第二滑杆滑动安装于第三导轨。即,第二滑杆安装于第三导轨,且可在第三导轨内相对导轨架沿y轴方向滑动。
19.一种实施方式中,转动机构还包括第二阻尼件和第三阻尼件,第二阻尼件设于第二导轨的侧壁,以增加第一滑杆与导轨架之间的滑动阻尼,第三阻尼件设于第三导轨的侧壁,以增加第二滑杆与导轨架之间的滑动阻尼。换言之,第二阻尼件和第三阻尼件的增设增加了第一滑杆和第二滑杆与导轨架之间的滑动阻尼力,进而增加了转动轴相对固定架转动时的阻尼,有助于转动轴相对固定架转动时在任意角度的固定,进而在转动机构用于移动终端时,有助于实现支撑装置对电子设备在任意角度的有效支撑。
20.一种实施方式中,第一滑槽和第二滑槽均为螺旋槽。即,第一滑槽和第二滑槽的延伸方向呈螺旋形。示例性的,第一滑槽和第二滑槽以转动轴的中心轴为螺旋轴,第一滑槽和第二滑槽绕螺旋轴的旋转角度等于或大于180度。
21.其中,第一滑槽和第二滑槽与旋转轴相对固定架的旋转角度相配合,以实现旋转轴相对固定架旋转时在任意角度的固定。
22.本实施方式中,由于第一滑槽和第二滑槽均为螺旋槽,第一滑槽和第二滑槽随旋转轴相对固定架的转动是非线性的。转动轴相对固定架转动时,第一滑块的滑动臂在第一滑槽相对转动轴非线性滑动,使第一滑块相对导轨架非线性滑动,从而使得第一滑杆在第一连杆的带动下相对导轨架非线性滑动。同样的,第二滑块的滑动臂在第二滑槽相对转动轴非线性滑动,使第二滑块相对导轨架非线性滑动,从而使得第二滑杆在第二连杆的带动下相对导轨架非线性滑动。换言之,转动轴相对固定架转动时,第一滑杆和第二滑杆均相对导轨架非线性滑动,以使得第一滑杆和第二滑杆与导轨架之间产生非线性的摩擦阻尼力。
23.另一种实施方式中,第一滑槽和第二滑槽均为直线槽。即,第一滑槽和第二滑槽的延伸方向呈直线型。
24.本实施方式中,由于第一滑槽和第二滑槽均为直线槽,转动轴相对固定架转动时,第一滑块的滑动臂在第一滑槽内相对转动轴线性滑动,使第一滑块相对导轨架线性滑动,此时第一滑杆在第一连杆的带动下仍相对导轨架非线性滑动。同样的,第二滑块的滑动臂在第二滑槽内相对转动轴线性滑动,使第二滑块相对导轨架线性滑动,此时第二滑杆在第二连杆的带动下仍相对导轨架非线性滑动。换言之,转动轴相对固定架转动时,第一滑杆和第二滑杆均相对导轨架非线性滑动,以使得第一滑杆和第二滑杆与导轨架之间产生非线性的摩擦阻尼力。
25.一种实施方式中,转动机构还包括转动架,转动架固定连接于转动轴,转动架相对固定架旋转时,以带动转动轴相对固定架转动。
26.一种实施方式中,转动机构还包括第一支撑板和第二支撑板。第一支撑板连接于转动架和第一滑杆之间,可在第一滑杆的带动下相对转动架转动,第二支撑板连接于转动架和第二滑杆之间,可在第二滑杆的带动下相对转动架转动。
27.本实施方式中,转动架相对固定架旋转时,第一滑杆、第一支撑板和转动架之间可形成稳定的三角形,第二滑杆、第二支撑板和转动架之间可形成稳定的三角形,有助于实现旋转轴相对固定架旋转时在任意角度的固定。
28.一种实施方式中,转动架包括主体部分、第一支撑部分和第二支撑部分,第一支撑部分和第二支撑部分分别固定连接于主体部分的相对两侧,第一支撑板连接于主体部分的一侧,且与第一支撑部分抵接,以增强第一滑杆、第一支撑板和转动架之间形成的三角形的稳定性,第二支撑板连接于主体部分的另一侧,且与第二支撑部分抵接,以增强第二滑杆、第二支撑板和转动架之间形成的三角形的稳定性,有助于实现旋转轴相对固定架旋转时在任意角度的固定。
29.一种实施方式中,转动机构还包括第一转动轴和第二转动轴,第一支撑板经第一转动轴与转动架连接,第二支撑板经第二转动轴与转动架连接,第一支撑板与第一转动轴之间过盈配合,以增强第一支撑板与转动架之间的转动阻尼,第二支撑板与第二转动轴之间过盈配合,以增强第二支撑板与转动架之间的转动阻尼,进而实现旋转轴相对固定架旋转时在任意角度的固定。
30.一种实施方式中,转动机构还包括阻尼器,阻尼器连接于第一滑块和第二滑块之间。其中,阻尼器位于第一导轨。
31.示例性的,阻尼器为弹簧,阻尼器的弹力方向为x轴方向。转动机构的展开角度为度时,阻尼器处于自由状态。转动架和固定架之间的夹角为度至度之间时,阻尼器处于拉伸状态。转动架和固定架之间的夹角为度至度之间时,阻尼器处于压缩状态。
32.本实施方式所示转动机构用于移动终端时,电子设备和支撑架的重量产生的重量阻尼力可等于第一滑杆和第二滑杆与转动架之间产生的非线性的摩擦阻尼力,且阻尼器产生的阻尼力与摩擦阻尼力之和与重量阻尼力之间的差值为恒定值,使用者在展开或盖合移动终端的过程中不会存在阻尼感,可恒力展开或盖合移动终端,实现对移动终端的恒力展开或盖合。
33.此外,阻尼器的增设可以减少或者释放转动轴与固定轴之间的摩擦阻尼,通过阻尼器和滑槽的配合,可以为移动终端提供足够支撑电子设备的非线性阻尼,提高支撑装置对电子设备的支撑稳定性。此外,阻尼器的增设还有助于减少转动轴的直径,从而有助于减
少转动轴与固定轴之间的接触面积,有利于减小转动轴和固定轴的直径,从而有助于减低移动终端的厚度,有利于实现移动终端的轻薄化设计。
34.一种实施方式中,转动机构还包括第一阻尼器和第二阻尼器,第一阻尼器位于第一滑块背离第二滑块的一侧,且连接于第一滑块和导轨架之间,第二阻尼器位于第二滑块背离第一滑块的一侧,且连接于第二滑块和导轨架之间。
35.其中,第一阻尼器和第二阻尼器均位于第一导轨,第一阻尼器连接于第一滑块和第一导轨的侧壁之间,第二阻尼器连接于第二滑块和第一导轨的侧壁之间。
36.示例性的,第一阻尼器和第二阻尼器均为弹簧,第一阻尼器和第二阻尼器的弹力方向均为x轴方向。
37.转动机构的展开角度为90度时,第一阻尼器和第二阻尼器均处于自由状态。转动机构的展开角度在0度至90度之间时,第一阻尼器和第二阻尼器处于压缩状态,以产生足够的阻尼力,与转动轴的滑槽的摩擦力共同作用,以将转动轴固定在相对固定架旋转至0度至90度之间的任意角度,进而在转动机构用于移动终端时,提高支撑装置对电子设备的支撑力,防止由于支撑装置支撑力不够而导致电子设备落下或者外翻。
38.相比于单一的阻尼器的方案,本实施方式中两个阻尼器的增设可以为转动机构提供更大的阻尼力,减少单一阻尼器的疲劳,提高转动机构的疲劳寿命。而且,对称分布的第一阻尼器和第二阻尼器还有利于增强转动机构的稳定性,进而有利于提高移动终端的支撑稳定性。
39.一种实施方式中,转动机构还包括第一阻尼器和第二阻尼器,第一阻尼器位于第一滑杆背离转动轴的一侧,且连接于第一滑杆和导轨架之间,第二阻尼器位于第二滑杆背离转动轴的一侧,且连接于第二滑杆和导轨架之间。
40.其中,第一阻尼器位于第二导轨,且连接于第一滑杆和第二导轨的侧壁之间。第二阻尼器位于第三导轨,且连接于第二滑杆和第三导轨的侧壁之间。
41.示例性的,第一阻尼器和第二阻尼器均为弹簧,第一阻尼器和第二阻尼器的弹力方向均为y轴方向。
42.转动机构的展开角度为90度时,第一阻尼器和第二阻尼器均处于自由状态。转动机构的展开角度在0度至90度之间时,第一阻尼器和第二阻尼器处于压缩状态,以产生足够的阻尼力,与转动轴的滑槽的摩擦力共同作用,以将转动轴固定在相对固定架旋转至0度至90度之间的任意角度,进而在转动机构用于移动终端时,提高支撑装置对电子设备的支撑力,防止由于支撑装置支撑力不够而导致电子设备落下或者外翻。
43.相比于单一的阻尼器的方案,本实施方式中两个阻尼器的增设可以为转动机构提供更大的阻尼力,可减少单一阻尼器的疲劳,提高转动机构的疲劳寿命。而且,对称分布的第一阻尼器和第二阻尼器还有利于增强转动机构的稳定性,有利于提高支撑装置的支撑稳定性。此外,弹力方向为y轴方向的第一阻尼器和第二阻尼器,可以提高转动机构的抗冲击响应速度,增强转动机构的稳定性,有利于提高支撑装置的系统稳定性。
44.第二方面,本技术提供一种支撑装置,包括壳体、支撑架和上述任一种转动机构,支撑架用于支撑电子设备,固定架固定连接于壳体,转动轴固定连接于支撑架。
45.本技术所示支撑装置中,支撑架相对壳体转动时,转动轴相对固定架转动,第一滑杆和第二滑杆相对导轨架沿y轴方向非线性滑动,第一滑杆和第二滑杆与导轨架之间产生
非线性的摩擦阻尼力。在支撑装置用于移动终端时,电子设备和支撑架的重量产生的重量阻尼力小于或等于摩擦阻尼力,且重量阻尼力与摩擦阻尼力之间的差值为恒定值,使用者在展开或盖合移动终端的过程中不会存在阻尼感,实现对移动终端的恒力展开或盖合,提高使用者的使用体验。
46.此外,第一滑杆和第二滑杆与导轨架之间的非线性阻尼可有效增加支撑架相对壳体转动时的阻尼,可以增加支撑装置对电子设备的支撑可靠性,使得支撑装置始终保持系统平衡,可实现支撑装置对电子设备在任意角度的稳定支撑和定位。
47.一种实施方式中,固定架为壳体的一部分,即部分壳体形成固定架。
48.一种实施方式中,转动机构有两个,两个转动机构沿x轴方向间隔排布,以增加支撑装置对电子设备的支撑稳定性。
49.第三方面,本技术提供一种移动终端,包括电子设备和上述任一种支撑装置,电子设备可拆卸地安装于支撑架。
50.本实施例所示移动终端中,承载有电子设备的支撑架相对主机转动时,第一滑杆和第二滑杆均相对导轨架非线性滑动,第一滑杆和第二滑杆与导轨架之间产生非线性的摩擦阻尼力。此时,电子设备和支撑架的重量产生的重量阻尼力小于或等于摩擦阻尼力,且重量阻尼力与摩擦阻尼力之间的差值为恒定值,使用者在展开或盖合移动终端的过程中不会存在阻尼感,可恒力展开或盖合移动终端,实现对移动终端的恒力展开或盖合,提高使用者的使用体验。
51.此外,第一滑杆和第二滑杆与导轨架之间的非线性阻尼可有效增加支撑架相对壳体转动时的阻尼,可以增加支撑装置对电子设备的支撑可靠性,使得移动终端始终保持系统平衡,可实现支撑装置对电子设备在任意角度的稳定支撑和定位。
52.一种实施方式中,移动终端的展开角度在90度至180度之间时,第一滑杆、第二滑杆和导轨架形成辅助平面,电子设备和支撑架的重心的投影位于辅助平面内,以避免因电子设备的重量过大而发生翻倒的问题,保证支撑装置对电子设备在任意角度的有效支撑。
53.第四方面,本技术提供一种移动终端,包括壳体、显示屏和上述任一种转动机构,固定架固定连接于壳体,转动轴固定连接于显示屏。
54.本实施例所示移动终端中,显示屏相对壳体转动时,第一滑杆和第二滑杆均相对导轨架非线性滑动,第一滑杆和第二滑杆与导轨架之间产生非线性的摩擦阻尼力。此时,显示屏的重量产生的重量阻尼力小于或等于摩擦阻尼力,且重量阻尼力与摩擦阻尼力之间的差值为恒定值,使用者在展开或盖合移动终端的过程中不会存在阻尼感,可恒力展开或盖合移动终端,实现对移动终端的恒力展开或盖合,提高使用者的使用体验。
55.此外,第一滑杆和第二滑杆与导轨架之间的非线性阻尼可有效增加支撑架相对壳体转动时的阻尼,可以增加显示屏的支撑可靠性,使得移动终端始终保持系统平衡,可实现电子设备在任意角度的稳定支撑和定位。
附图说明
56.为了更清楚地说明本技术实施例或背景技术中的技术方案,下面将对本技术实施例或背景技术中所需要使用的附图进行说明。
57.图1是本技术实施例提供的一种移动终端在一种状态下的结构示意图;
58.图2是图1所示移动终端在另一种状态的结构示意图;
59.图3是图2所示移动终端的分解结构示意图;
60.图4是图3所示移动终端中转动机构在一种实施方式下的结构示意图;
61.图5是图4所示转动机构的分解结构示意图;
62.图6是图4所示转动机构中固定架、转动轴、转动架和固定轴的组装结构示意图;
63.图7是图4所示转动机构中导轨架的结构示意图;
64.图8是图4所示转动机构中导轨架、第一滑块、第二滑块、第一滑杆、第二滑杆、第一连杆和第二连杆的组装结构示意图;
65.图9是图4所示转动机构在另一个状态下的结构示意图;
66.图10是图2所示移动终端在第三种状态下的结构示意图;
67.图11是图3所示支撑装置中转动机构在第二种实施方式下的结构示意图;
68.图12是图3所示支撑装置中转动机构在第三种实施方式下的结构示意图;
69.图13是图3所示支撑装置中转动机构在第四种实施方式下的结构示意图;
70.图14是图3所示支撑装置中转动机构在第五种实施方式下的结构示意图;
71.图15是图14所示转动机构中固定架、转动轴、转动架和固定轴的组装结构示意图;
72.图16是图14所示转动机构在另一种状态下的结构示意图;
73.图17是图3所示支撑装置中转动机构在第六种实施方式下的结构示意图;
74.图18是图3所示支撑装置中转动机构在第七种实施方式下的结构示意图;
75.图19是图3所示支撑装置中转动机构在第八种实施方式下的结构示意图;
76.图20是图3所示支撑装置中转动机构在第九种实施方式下的结构示意图;
77.图21是本技术实施例提供的第二种移动终端的结构示意图。
具体实施方式
78.下面结合本技术实施例中的附图对本技术实施例进行描述。
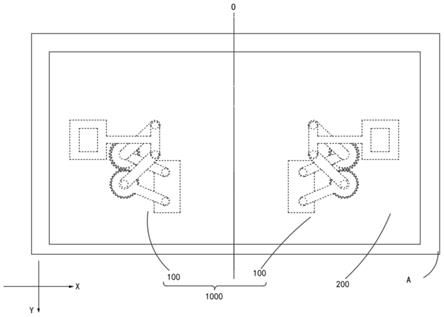
79.请参阅图1和图2,图1是本技术实施例提供的一种移动终端1000在一种状态下的结构示意图,图2是图1所示移动终端1000在另一种状态下的结构示意图。其中,图1所示移动终端1000处于合盖状态,图2所示移动终端1000处于展开状态,移动终端1000的展开角度α为90度。
80.移动终端1000包括电子设备100和支撑装置200,电子设备100可拆卸地安装于支撑装置200。电子设备100可以为手机、平板电脑、mp3、mp4等具有音频播放或者视频播放功能的电子产品。本技术实施例以电子设备100为平板电脑,支撑装置200为平板电脑支架为例进行说明。电子设备100可用作移动终端1000的显示器。电子设备100具有显示面101,显示面101用于显示画面或文字等信息。移动终端1000处于展开状态时,显示面101相对于支撑装置200露出,以便于使用者观察显示面101的显示信息。
81.其中,为了便于描述,定义移动终端1000的宽度方向为x轴方向,移动终端1000的长度方向为y轴方向,移动终端1000的厚度方向为z轴方向,x轴方向、y轴方向和z轴方向两两相互垂直。
82.请一并参阅图3,图3是图2所示移动终端1000的分解结构示意图。
83.支撑装置200包括主机210、支撑架220和转动机构230,转动机构230连接于主机
210和支撑架220之间,以实现支撑架220与主机210之间的转动连接。即,支撑架220经转动机构230与主机210转动连接。也即,支撑架220可经转动机构230相对于主机210旋转。本实施例中,转动机构230有两个,两个转动机构230的结构相同,且沿x轴方向间隔排布。此时,支撑装置200处于展开状态。即,支撑架220与主机210之间相对展开。示例性的,支撑架220与主机210之间的展开角度为90度。在其他一些实施例中,转动机构230也可以为一个或三个以上,本技术实施例对转动机构230的数量不作具体限定。
84.主机210包括壳体211、处理器212、键盘213和触控板214。处理器212安装于壳体211的内侧。处理器212可为主机210的中央处理器212(central processing unit,cpu)。键盘213和触控板214安装于壳体211,且沿y轴方向间隔排布。具体的,键盘213和触控板214均相对于壳体211露出,以便用户操作键盘212和触控板214。示例性的,键盘213和触控板214均相对于壳体211的顶面露出。其中,键盘213和触控板214均与处理器212电连接。用户可对键盘213和/或触控板214进行操作而产生操作信号,处理器212可对操作信号进行处理。
85.支撑架220通过转动机构230连接于壳体211的一侧,用于支撑和固定电子设备100。支撑架220设有固定槽221,固定槽221用于固定电子设备100。具体的,固定槽221的开口位于支撑架220的前侧面。固定槽221自支撑架220的前侧面向后侧面的方向延伸。其中,固定槽221的宽度大于或等于电子设备100的厚度。电子设备100固定于固定槽221时,电子设备100的显示面101不会相对于支撑架220的底面凸出,以减小处于合盖状态的移动终端1000的厚度,减小移动终端1000的体积占用,便于使用者携带。
86.此外,固定槽221还贯穿支撑架220的底面。电子设备100固定于固定槽221时,电子设备100的显示面101可相对于支撑架220的底面露出,以便于使用者观看显示面101的显示信息。此时,电子设备100可与主体的处理器212通过无线或者有线的方式实现通讯连接。
87.需要说明的是,本技术实施例描述移动终端1000时所采用“顶”、“底”、“前”和“后”等方位用词主要依据移动终端1000于附图1中的展示方位进行阐述,以朝向z轴正方向为顶,以朝向z轴负方向为底,以朝向y轴正方向为后,以朝向y轴负方向为正,其并不形成对移动终端1000于实际应用场景中的方位的限定。
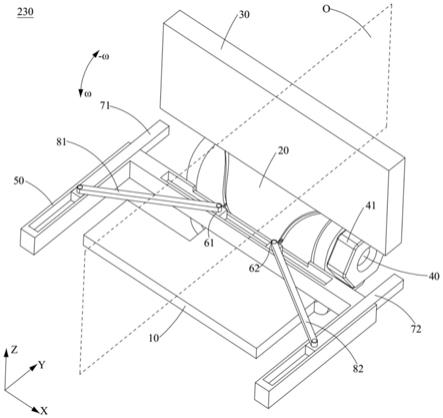
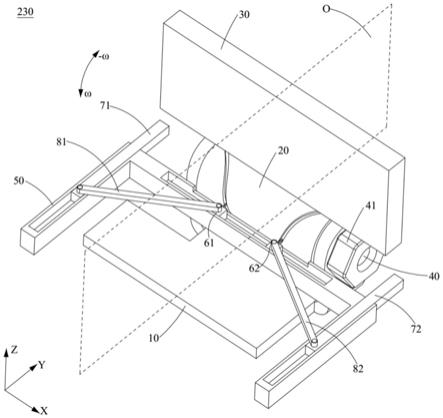
88.请参阅图4和图5,图4是图3所示移动终端1000中转动机构230在一种实施方式下的结构示意图,图5是图4所示转动机构230的分解结构示意图。
89.转动机构230具有对称面o,转动机构230相对于对称面o镜像对称。本实施方式中,转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20。转动架300相对于固定架10转动时,可带动转动轴20相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
90.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动
下带动第二滑杆72相对导轨架50滑动。
91.请参阅图6,图6是图4所示转动机构230中固定架10、转动轴20、转动架30和固定轴40的组装结构示意图。
92.固定架10包括固定板11和两个支撑臂12,两个支撑臂12均固定连接于固定板11。其中,固定板11和两个支撑臂12可一体成型,以节省固定架10的制造成本,提高固定架10的整体强度。本实施例中,固定板11呈“l”形。固定板11包括第一部分111和第二部分112,第二部分112固定连接于第一部分111的一侧。具体的,第一部分111沿x轴方向延伸,第二部分112沿y轴方向延伸。其中,第二部分112固定连接于第一部分111朝向y轴正方向的一侧。在其他一些实施例中,固定板11也可以呈“一”形或者其他形状,本技术对固定板11的形状不作具体限定。
93.两个支撑臂12分别固定连接于第二部分112的相对两侧,且沿x轴方向间隔排布。每一支撑臂12均设有转轴孔(图未标),转轴孔沿支撑臂12的厚度方向贯穿支撑臂12。示例性的,转轴孔为圆形孔。本实施例中,两个支撑臂12分别为第一支撑臂12a和第二支撑臂12b,第二支撑臂12b位于第一支撑臂12a朝向x轴正方向的一侧。具体的,第一支撑臂12a和第二支撑臂12b相对设置。其中,第一支撑臂12a的转轴孔和第二支撑臂12b的转轴孔相对设置。
94.应当理解的是,本技术实施例描述移动终端所提及的相对设置是指至少部分正对设置。例如,第一支撑臂12a和第二支撑臂12b相对设置是指,第一支撑臂12a在第二支撑臂12b的正投影部分覆盖第二支撑臂12b,或者,第一支撑臂12a在第二支撑臂12b的正投影覆盖第二支撑臂12b。本技术实施例后文所提及的相对设置可做相同理解。
95.转动轴20设有转轴孔(图未标)和滑槽201。转轴孔设于转动轴20的内侧。转轴孔的开口位于转动轴20的右侧面。转轴孔沿转动轴20的右侧面向左侧面的方向凹陷,且贯穿转动轴20的左侧面。即,转轴孔沿转动轴20的轴向贯穿转动轴20。其中,转轴孔呈圆柱形。
96.滑槽201的开口位于转动轴20的外表面。滑槽201自转动轴20的外表面向内表面凹陷。其中,滑槽201为螺旋槽。即滑槽201的延伸方向呈螺旋形。示例性的,滑槽201以转动轴20的中心轴为螺旋轴,滑槽201绕螺旋轴的旋转角度等于或大于180度。本实施例中,滑槽201有两个,两个滑槽201分别为第一滑槽201a和第二滑槽201b。具体的,第一滑槽201a和第二滑槽201b沿x轴方向间隔排布。其中,沿顺时针方向(图示ω方向)上,第一滑槽201a和第二滑槽201b之间的距离越来越小。应当理解的是,转动轴20的形状并不仅限于图示的圆筒状,也可以为方筒状或者其他异形筒状,本技术对转动轴20的形状不作具体限定。
97.转动轴20转动安装于固定架10。即,转动轴20安装于固定架10,且可相对于固定架10转动。具体的,转动轴20位于两个支撑臂12之间。转动轴20的转轴孔和两个支撑臂12的转轴孔相对设置。其中,第一滑槽201a和第二滑槽201b均朝向固定架10的第一部分111。第一滑槽201a相比于第二滑槽201b靠近第一支撑臂12a,第二滑槽201b相比于第一滑槽201a靠近第二支撑臂12b。此外,转动轴20的左侧面可与第一支撑臂12a的右侧面抵接,转动轴20的右侧面与第二支撑臂12b的左侧面抵接,以增加转动轴20相对固定架10旋转时的阻尼,有助于转动轴20相对固定架10旋转时在任意角度的固定。
98.固定轴40固定连接于两个支撑臂12。示例性的,固定轴40可依次穿过第二支撑臂12b的转轴孔和转动轴20的转轴孔伸入第一支撑臂12a的转轴孔。具体的,部分固定轴40位
于第一支撑臂12a的转轴孔,部分固定轴40位于转动轴20的转轴孔,部分固定轴40位于第二支撑臂12b的转轴孔,部分固定轴40相对于第二支撑臂12b伸出。其中,固定轴40与两个支撑臂12的转轴孔的孔壁之间固定连接,以实现固定轴40与两个支撑臂12之间的固定连接,进而实现固定轴40与固定架10之间的固定连接。在其他一些实施例中,固定轴40与两个支撑臂12的转轴孔之间过盈配合,以实现固定轴40与两个支撑臂12之间的固定连接。
99.请一并参阅图4和图5,转动机构230还包括固定件41,固定件41套设于固定轴40相对于第二支撑臂12b伸出的部分,防止固定轴40沿轴向从两个支撑臂12的转轴孔掉落,提高固定轴40与固定架10之间的连接稳定性。
100.转动轴20套设于固定轴40的外表面,且可相对于固定轴40旋转,以实现与固定架10之间的转动连接。本实施例中,转动轴20的转轴孔的内径大于固定轴40的外径。转轴机构230还包括第一阻尼件(图未示),第一阻尼件套设于固定轴40的外表面。具体的,第一阻尼件连接于固定轴40和转动轴20之间,以增加转动轴20相对固定轴40转动时的阻尼,有助于转动轴20相对于固定轴40转动时在任意角度的固定。
101.在其他一些实施例中,转动轴20的转轴孔的内径也可以等于或者小于固定轴40的外径,或者,转动机构230也可以不包括第一阻尼件,转动轴20的转轴孔与固定轴40之间过盈配合,同样可以增加转动轴20相对固定轴40转动时的阻尼。
102.转动架30固定连接于转动轴20的外表面。转动架30可在转动轴20的带动下,相对固定架10转动,以在与固定架10相对折叠和相对展开两个状态之间切换。其中,转动轴20的滑槽201相对于转动架30露出。应当理解的是,转动架30的形状并不仅限于图示的方形板体,也可以为圆形板体或者其他异形板体,本技术对转动架30的形状结构不作具体限定。
103.请参阅图4和图7,图7是图4所述转动机构230中导轨架50的结构示意图。
104.导轨架50与固定架10的固定板11沿z轴方向间隔。具体的,导轨架50位于固定板11的顶侧。其中,导轨架50设有导轨501,导轨501的开口位于导轨架50的顶面。具体的,导轨501自导轨架50的顶面向底面的方向凹陷。即,导轨架50的顶面局部凹陷形成导轨501。
105.本实施例中,导轨501有三个,三个导轨501分别为第一导轨502、第二导轨503和第三导轨504。具体的,第一导轨502沿x轴方向延伸。示例性的,第一导轨502可包括第一子导轨和第二子导轨(图未标),第一子导轨位于第二子导轨朝向x轴负方向的一侧,且与第二子导轨连通。在其他一些实施例中,第一子导轨和第二子导轨也可不连通,此时第一子导轨和第二子导轨沿x轴方向间隔排布。
106.第二导轨503和第三导轨504均沿y轴方向延伸,且沿x轴方向间隔排布。具体的,第二导轨503和第三导轨504分别位于第一导轨502的相对两侧。其中,第二导轨503位于第三导轨504朝向x轴负方向的一侧。此外,第二导轨503和第三导轨504均贯穿导轨架50的后侧面。
107.本实施例中,导轨架50还设有缺口505,缺口505的开口位于第一导轨502的侧壁面。缺口505自第一导轨502的侧壁面向导轨架50的后侧面的方向凹陷,且贯穿导轨架50的后侧面。此外,缺口505还贯穿导轨架50的顶面。
108.示例性的,缺口505可包括第一子缺口和第二子缺口(图未标),第一子缺口位于第二子缺口朝向x轴负方向的一侧,且与第二子缺口连通。其中,第一子缺口的开口位于第一子导轨的侧壁面,第二子缺口的开口位于第二子导轨的侧壁面。在其他一些实施例中,第一
子缺口和第二子缺口也可不连通,此时第一子缺口和第二子缺口沿x轴方向间隔排布。
109.一种实施方式中,导轨架50呈“凵”形。导轨架50包括第一部分51、第二部分52和第三部分53。第二部分52和第三部分53分别固定连接于第二部分52的相对两侧。第一部分51沿x轴方向延伸。第二部分52和第三部分53均沿y轴方向延伸。第二部分52位于第三部分53朝向x轴负方向的一侧,且与第三部分53间隔排布。其中,第一导轨502设于第一部分51,第二导轨503设于第二部分52,第三导轨504设于第三部分53。在其他一些实施方式中,导轨架50也可以呈其他形状,本技术对导轨架50的形状不作具体限定。
110.请参阅图8,图8是图4所示转动机构230中导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82的组装结构示意图。
111.第一滑块61和第二滑块62均安装于导轨架50,且可相对于导轨架50沿x轴方向滑动。具体的,第一滑块61和第二滑块62均安装于第一导轨502,且可在第一导轨502相对导轨架50滑动。其中,第一滑块61安装于第一子导轨,第二滑块62安装于第二子导轨。第一滑块61和第二滑块62可在第一导轨502内同时滑动,以实现第一滑块61和第二滑块62之间的相互靠近,或者,实现第一滑块61和第二滑块62之间的彼此远离。
112.第一滑块61包括滑动臂611和连接轴612。第一滑块61的滑动臂611连接于第一滑块61的后侧面,且穿过缺口504相对导轨架50的后侧面伸出。第一滑块61的滑动臂611可在第一滑块61的带动下在缺口504内相对导轨架50移动。其中,第一滑块61的滑动臂611穿过第一缺口(图未标)相对导轨架50的后侧面伸出。第一滑块61的连接轴612连接于第一滑块61的顶面,且相对于导轨架50的顶面伸出。示例性的,第一滑块61的连接轴612呈圆柱形。
113.本实施例中,第二滑块62和第一滑块61的结构相同。第二滑块62包括滑动臂621和连接轴622。第二滑块62的滑动臂621连接于第二滑块62的后侧面,且穿过缺口504相对导轨架50的后侧面伸出。第二滑块62的滑动臂621可在第二滑块62的带动下在缺口504内相对导轨架50移动。其中,第二滑块62的滑动臂621自第二缺口(图未标)相对导轨架50的后侧面伸出。第二滑块62的连接轴622连接于第二滑块62的顶面,且相对于导轨架50的顶面伸出。示例性的,第二滑块62的连接轴622呈圆柱形。在其他一些实施例中,第一滑块61和第二滑块62的结构也可以不相同。
114.第一滑杆71和第二滑杆72均安装于导轨架50,且可相对于导轨架50沿y轴方向滑动。具体的,第一滑杆71安装于第二导轨503,且可在第二导轨503内相对导轨架50滑动。第二滑杆72安装于第三导轨504,且可在第三导轨504内相对导轨架50滑动。其中,第一滑杆71和第二滑杆72沿x轴方向彼此间隔排布。
115.示例性的,转动机构230可包括第二阻尼件和第三阻尼件(图未示),第二阻尼件可设于第二导轨503的侧壁,以增加第一滑杆71与第二导轨503之间的滑动阻尼,第三阻尼件可设于第三导轨504的侧壁,以增加第二滑杆72与第三导轨504之间的滑动阻尼。
116.第一滑杆71具有相对设置的连接端711和自由端712。第一滑杆71的连接端711位于第二导轨503内。第一滑杆71的自由端712可位于第二导轨503外。第一滑杆71包括连接轴713。第一滑杆71的连接轴713连接于第一滑杆71的顶面,且靠近第一滑杆71的连接端711设置。
117.本实施例中,第二滑杆72和第一滑杆71的结构相同。第二滑杆72具有相对设置的连接端721和自由端722。第二滑杆72的连接端721位于第三导轨504内,第一滑杆71的自由
端722可位于第三导轨504外。第二滑杆72包括连接轴723。第二滑杆72的连接轴723连接于第二滑杆72的顶面,且靠近第二滑杆72的连接端721设置。在其他一些实施例中,第一滑杆71和第二滑杆72的结构也可以不相同。
118.第一连杆81的一端与第一滑块61转动连接,另一端与第一滑杆71转动连接。具体的,第一连杆81的一端通过第一滑块61的连接轴612与第一滑块61转动连接,另一端通过第一滑杆71的连接轴713与第一滑杆71转动连接。其中,第一滑块61在第一导轨502内相对导轨架50沿x轴正方向滑动时,带动第一连杆81相对导轨架50移动,进而带动第一滑杆71在第二导轨503内相对导轨架50沿y轴正方向滑动。第一滑块61在第一导轨502内相对导轨架50沿x轴负方向滑动时,带动第一连杆80相对导轨架50移动,进而带动第一滑杆71在第二导轨502内相对导轨架50沿y轴负方向滑动。
119.本实施例中,第二连杆82和第一连杆81的结构相同。第二连杆82的一端与第二滑块62转动连接,另一端与第二滑杆72转动连接。具体的,第二连杆82的一端通过第二滑块62的连接轴622与第二滑块62转动连接,另一端通过第二滑杆72的连接轴723与第二滑杆72转动连接。其中,第二滑块62在第一导轨502内相对导轨架50沿x轴正方向滑动时,带动第二连杆82相对导轨架50移动,进而带动第二滑杆82在第三导轨504内相对导轨架50沿y轴负方向滑动。第二滑块62在第一导轨502内相对导轨架50沿x负方向滑动时,带动第二连杆82相对导轨架50移动,进而带动第二滑杆82在第三导轨504内相对导轨架50沿y轴正方向滑动。在其他一些实施例中,第二连杆82和第一连杆81的结构也可以不相同。
120.请参阅图4,导轨架50与转动轴20的第一滑槽201a和第二滑槽201b(如图6所示)相对设置。第一滑块61的滑动臂611滑动安装于转动轴20的第一滑槽201a(如图6所示)。即,第一滑块61的滑动臂611安装于转动轴20的第一滑槽201a,且可在第一滑槽201a内相对转动轴20滑动。第二滑块62的滑动臂621滑动安装于转动轴20的第二滑槽201b(如图6所示)。即,第二滑块62的滑动臂621安装于转动轴20的第二滑槽201b,且可在第二滑槽201b内相对转动轴20滑动。
121.转动轴20沿逆时针方向(图示ω方向)旋转时,第一滑块61的滑动臂611在第一滑槽201a内相对转动轴20沿顺时针方向(图示
‑
ω方向)滑动,以使第一滑块61在第一导轨502(如图8所示)内相对导轨架50沿x轴负方向滑动。同时,第二滑块62的滑动臂621在第二滑槽201b内相对转动轴20沿顺时针方向(图示
‑
ω方向)滑动,以使第二滑块62在第一导轨502内相对导轨架50沿x轴正方向滑动。此时,第一滑块61和第二滑块62之间彼此远离。即,第一滑块61和第二滑块62之间的距离越来越大。
122.转动轴20沿顺时针方向(图示
‑
ω方向)旋转时,第一滑块61的滑动臂611在第一滑槽201a内相对转动轴20沿逆时针方向(图示ω方向)滑动,以使第一滑块61在第一导轨502内相对导轨架50沿x轴正方向滑动。同时,第二滑块62的滑动臂621在第二滑槽201b内相对转动轴20沿逆时针方向(图示ω方向)滑动,以使第二滑块62在第一导轨502内沿x轴负方向滑动。此时,第一滑块61和第二滑块62之间相互靠近。即,第一滑块61和第二滑块62之间的距离越来越小。
123.请一并参阅图9,图9是图4所示转动机构230在另一个状态下的结构示意图。其中,转动架30与固定架10之间的展开角度在0度至90度之间。
124.当转动架30在外力的作用下相对固定架10折叠时,转动轴20在转动架30的带动下
沿逆时针方向(图示ω方向)旋转,第一滑块61和第二滑块62相对导轨架50滑动以彼此远离。此时,第一连杆81在第一滑块61的带动下相对导轨架50移动,以带动第一滑杆71相对导轨架50沿y轴正方向滑动,第二连杆82在第二滑块62的带动下相对导轨架50移动,以带动第二滑杆72相对导轨架50沿y轴正方向滑动。
125.当转动架30在外力的作用下相对固定架10展开时,转动轴20在转动架20的带动下沿顺时针方向(图示ω方向)旋转,第一滑块61和第二滑块62相对导轨架50滑动以相互靠近。此时,第一连杆81在第一滑块61的带动下相对导轨架50移动,以带动第一滑杆71相对导轨架50沿y轴负方向滑动,第二连杆82在第二滑块81的带动下相对导轨架50移动,以带动第二滑杆72相对导轨架50沿y轴负方向滑动。
126.请参阅图2和图4,固定架10位于主机210的壳体211的内侧,且与壳体211固定连接。具体的,固定架10的固定板11与壳体211固定连接。示例性的,固定板11可通过螺钉或螺栓等固定件固定连接于壳体211。转动架30位于支撑架220的内侧,且与支撑架220固定连接。示例性的,转动架30可通过螺钉或螺栓等固定件固定连接于支撑架220。导轨架50安装于支撑架220的内侧,且与壳体211固定连接。示例性的,导轨架50可通过螺钉或螺栓等固定件固定连接于壳体211。在其他一些实施例中,固定架10可以为壳体211的一部分,即部分壳体211形成固定架10,和/或,转动架30为支撑架220的一部分,即部分支撑架220形成转动架30,和/或,导轨架50为壳体211的一部分,即部分壳体211形成导轨架50。
127.请一并参阅图1,支撑装置200的支撑架220在外力作用下相对主机210盖合时,移动终端1000在外力作用下盖合。此时,转动机构230的转动架30在支撑架220的带动下相对固定架10盖合,转动轴20在转动架30的带动下相对固定架10沿逆时针方向旋转,第一滑块61和第二滑块62相对导轨架50滑动以彼此远离。第一连杆81和第二连杆72分别在第一滑块61和第二滑块62的带动下相对导轨架50移动,以带动第一滑杆71和第二滑杆72相对导轨架50沿y轴正方向滑动。
128.支撑装置200的支撑架220在外力作用下相对主机210展开时,移动终端1000在外力作用下展开。此时,转动机构230的转动架30在支撑架220的带动下相对固定架10展开,转动轴20在转动架30的带动下相对固定架10沿顺时针方向旋转,第一滑块61和第二滑块62相对导轨架50滑动以相互靠近。第一连杆81和第二连杆72分别在第一滑块61和第二滑块62的带动下相对导轨架50移动,以带动第一滑杆71和第二滑杆72相对导轨架50沿y轴负方向滑动。
129.请一并参阅图10,图10是图2所示移动终端1000在另一个状态下的结构示意图。其中,移动终端1000处于展开状态,移动终端1000的展开角度β在90度至180度之间。
130.转动机构230的第一滑杆71和第二滑杆71相对于主机210的后侧面伸出。转动机构230的导轨架50、第一滑杆71和第二滑杆72构成辅助平面s。其中,电子设备100和支撑架210的重心g的正投影位于辅助平面s,以避免因电子设备100的重量大于主机200的重量大而发生翻倒的问题,保证支撑装置220对电子设备100在任意角度的有效支撑。
131.本实施例所示移动终端1000中,承载有电子设备100的支撑架220相对主机210转动时,第一滑块61的滑动臂611和第二滑块62的滑动臂621均相对转动轴20非线性滑动,以使第一滑块61和第二滑块62均相对导轨架50非线性滑动,从而第一滑杆71和第二滑杆72分别在第一连杆81和第二连杆82的带动下相对导轨架50非线性滑动。此时,电子设备100和支
撑架220的重量产生的重量阻尼力为f1,两个转动机构230中第一滑杆71和第二滑杆72与导轨架50之间产生的非线性的摩擦阻尼力之和为f2。其中,f1<f2,δf=f2‑
f1。需要说明的是,当支撑装置200将电子设备100支撑固定在任意角度时,δf为恒定值,使用者可采用打开或者盖合移动终端1000的过程中,不会感受到阻尼的变化,可实现对移动终端1000的恒力开合,提高使用者的使用体验。
132.此外,本实施例所示移动终端1000中,转动轴20的第一滑槽201a和第二滑槽201b可与转动架30相对固定架10旋转的角度相适配,而且,连接于转动轴20和固定轴40之间的第一阻尼件、设于第二导轨503的第二阻尼件以及设于第三导轨504的第三阻尼件,均可有效增加支撑架220相对主机210转动时的阻尼,可以增加支撑装置200对电子设备100的支撑可靠性,使得移动终端1000始终保持系统平衡,可实现支撑装置200对电子设备100在任意角度的稳定支撑和定位。
133.请参阅图11,图11是图3所示支撑装置200中转动机构230在第二种实施方式下的结构示意图。
134.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
135.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
136.本实施方式所示转动机构230与上述实施方式所示转动机构230的不同之处在于,转动机构230还包括阻尼器60,阻尼器60连接于第一滑块61和第二滑块62之间。示例性的,阻尼器60为弹簧,阻尼器60的弹力方向为x轴方向。具体的,阻尼器60位于第一导轨502,且连接于第一滑块61和第二滑块62之间。其中,阻尼器60的一端连接于第一滑块61的右侧面,另一端连接于第二滑块62的左侧面。转动机构230的展开角度为90度时,阻尼器60处于自由状态。转动架30和固定架10之间的夹角为0度至90度之间时,阻尼器60处于拉伸状态。转动架30和固定架10之间的夹角为90度至180度之间时,阻尼器60处于压缩状态。
137.当承载有电子设备100的支撑架220相对主机210转动时,电子设备100与支撑架220的重量所产生的重量阻尼力为f1,两个转动机构230中第一滑杆71和第二滑杆72与导轨架50之间产生的非线性的摩擦阻尼力之和为f2,阻尼器60所产生的非线性的阻尼力为f3。其中,f1≤f2,δf=f2 f3‑
f1。需要说明的是,当支撑装置200将电子设备100支撑固定在任意角度时,δf为恒定值,使用者可采用打开或者盖合移动终端1000的过程中,不会感受到阻尼的变化,可实现对移动终端1000的恒力开合,提高使用者的使用体验。
138.本实施方式中,阻尼器60的增设可以减少或者释放转动轴20与固定轴40之间的摩
擦阻尼,通过阻尼器60和滑槽201的配合,可以为移动终端1000提供足够支撑电子设备100的非线性阻尼,提高支撑装置200对电子设备100的支撑稳定性。此外,阻尼器60的增设还有助于减少转动轴20的直径,从而有助于减少转动轴20与固定轴40之间的接触面积,有利于减小转动轴20和固定轴40的直径,从而有助于减低移动终端1000的厚度,有利于实现移动终端1000的轻薄化设计。
139.请参阅图12,图12是图3所示支撑装置200中转动机构230在第三种实施方式下的结构示意图。
140.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
141.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
142.本实施方式所示转动机构230与上述第二种实施方式所示转动机构230的不同之处在于,阻尼器60有两个。示例性的,两个阻尼器60均为弹簧,两个阻尼器60的弹力方向均沿x轴方向。其中,两个阻尼器60分别为第一阻尼器60a和第二阻尼器60b。第一阻尼器60a位于第一滑块61背离第二滑块62的一侧,且连接于第一滑块61和导轨架50之间。第二阻尼器60b位于第二滑块62背离第一滑块61的一侧,且连接于第二滑块61和导轨架50之间。
143.具体的,第一阻尼器60a位于第一导轨502,且连接于第一滑块61和第一导轨502的侧壁之间。第二阻尼器60b位于第一导轨502,且连接于第二滑块62和第一导轨502的侧壁之间。其中,第一阻尼器60a的一端连接于第一滑块61的左侧面,另一端连接于第一导轨502的左侧壁。第二阻尼器60b的一端连接于第二滑块62的右侧面,另一端连接于第一导轨502的右侧壁。
144.转动机构230的展开角度为90度时,即转动架30和固定架10之间的夹角为90度时,第一阻尼器60a和第二阻尼器60b均处于自由状态。转动机构230的展开角度在0度至90度之间时,即转动架30和固定架10之间的夹角在0度至90度之间时,第一阻尼器60a和第二阻尼器60b处于压缩状态,以产生足够的阻尼力与滑槽201的摩擦力共同作用以支撑转动架30,以将转动架30固定在0度至90度之间的任意角度,提高支撑装置200对电子设备100的支撑力,防止由于支撑装置200支撑力不够而导致电子设备100落下或者外翻。
145.本实施方式中,两个阻尼器60的增设可以为转动机构230提供更大的阻尼力,相比于上述第二种实施方式,可减少单一阻尼器60的疲劳,提高转动机构230的疲劳寿命。而且,对称分布的第一阻尼器60a和第二阻尼器60b还有利于增强转动机构230的稳定性,进而有利于提高支撑装置200的支撑稳定性。
146.请参阅图13,图13是图3所示支撑装置200中转动机构230在第四种实施方式下的结构示意图。
147.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
148.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
149.本实施方式所示转动机构230与上述第二种实施方式所示转动机构230的不同之处在于,阻尼器60有两个。示例性的,两个阻尼器60均为弹簧,两个阻尼器60的弹力方向均为y轴方向。其中,两个阻尼器60分别为第一阻尼器60a和第二阻尼器60b。具体的,第一阻尼器60a位于第二导轨503,且连接于第一滑杆71和第二导轨503的侧壁之间。第二阻尼器60b位于第三导轨504,且连接于第二滑杆72和第三导轨504的侧壁之间。其中,第一阻尼器60a的一端连接于第一滑杆71的连接端711,另一端连接于第二导轨503的前侧壁。第二阻尼器60b的一端连接于第二滑杆72的连接端721,另一端连接于第三导轨503的前侧壁。
150.转动机构230的展开角度为90度时,即转动架30和固定架10之间的夹角为90度时,第一阻尼器60a和第二阻尼器60b均处于自由状态。转动机构230的展开角度在0度至90度之间时,即转动架30和固定架10之间的夹角在0度至90度之间时,第一阻尼器60a和第二阻尼器60b处于压缩状态,以产生足够的阻尼力与滑槽201的摩擦力共同作用以支撑转动架30,以将转动架30固定在0度至90度之间的任意角度,提高支撑装置200对电子设备100的支撑力,防止由于支撑装置200的支撑力不够而导致电子设备100落下或者外翻。
151.本实施方式中,两个阻尼器60的增设可以为转动机构230提供更大的阻尼力,相比于上述第二种实施方式,可减少单一阻尼器60的疲劳,提高转动机构230的疲劳寿命。而且,对称分布的第一阻尼器60a和第二阻尼器60b还有利于增强转动机构230的稳定性,有利于提高支撑装置200的支撑稳定性。此外,弹力方向为y轴方向的第一阻尼器60a和第二阻尼器60b,可以提高转动机构230的抗冲击响应速度,增强转动机构230的稳定性,有利于提高支撑装置200的系统稳定性。
152.请参阅图14,图14是图3所示支撑装置200中转动机构230在第五种实施方式下的结构示意图。
153.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之
间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
154.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
155.本实施方式所示转动机构230与上述第一种实施方式所示转动机构230的不同之处在于,转动机构230还包括第一支撑板91和第二支撑板92,第一支撑板91和第二支撑板92分别位于转动轴20的相对两侧。具体的,第一支撑板91连接于转动架30和第一滑杆71之间,第二支撑板92连接于转动架20和第二滑杆72之间。
156.请一并参阅图15,图15是图14所示转动机构230中固定架10、转动轴20、转动架30和固定轴40的组装结构示意图。
157.转动架30设有缺口301,缺口301的开口均位于转动架30的底面。缺口301自转动架30的底面向顶面凹陷,且贯穿外观面。即,缺口301沿转动架30的厚度方向贯穿转动架30。此外,缺口301还贯穿转动架30的侧面。本实施例中,转动架30设有三个缺口301,三个缺口301分别为第一缺口302、第二缺口303和第三缺口304。第一缺口302和第二缺口303分别设于转动架30的相对两侧,且沿y轴方向间隔排布。第一缺口302贯穿转动架30的左侧面和后侧面,第二缺口303贯穿转动架30的右侧面和后侧面。第三缺口304设于转动架30靠近固定架10的位置,且贯穿转动架30的后侧面。
158.一种实施方式中,转动架30包括主体部分31、第一支撑部分32、第二支撑部分33、第一辅助部分34和第二辅助部分35。第一支撑部分32和第二支撑部分33固定连接于主体部分31的相对两侧,且沿x轴方向间隔排布。第一支撑部分32和主体部分31围合形成第一缺口302。第二支撑部分33和主体部分31围合形成第二缺口303。第一辅助部分34和第二辅助部分35固定连接于主体部分31朝向固定架10的一侧,且沿x轴方向间隔排布。第一辅助部分34、第二辅助部分35和主体部分31围合形成第三缺口304。
159.部分转动轴20位于第三缺口304,且固定连接于转动架30,以实现转动轴20与转动架30之间的固定连接。由于部分转动轴20位于第三缺口304内,转动架30在转动轴20的带动下相对固定架10发生转动时,转动架30与转动轴20之间不会产生干涉,保证了转动架30相对固定架10转动时的有效性。在其他一些实施例中,转动架30可以仅包括主体部分31,而不包括第一支撑部分32、第二支撑部分33、第一辅助部分34和第二辅助部分35。
160.请一并参阅图14,第一支撑板91与转动架30转动连接,另一端与第一滑杆71转动连接,以在第一滑杆71的带动下相对转动架30转动。具体的,第一支撑板91的一端位于第一缺口302,且与转动架30的主体部分31转动连接,另一端与第一滑杆71的自由端712(如图8所示)转动连接。此外,转动机构230包括第一旋转轴和第三旋转轴(图未示)。第一支撑板91通过第一旋转轴与转动架30的主体部分31转动连接,并通过第三旋转轴与第一滑杆71转动连接。示例性的,第一支撑板91和转动架30之间通过包圆式转轴过盈配合,即第一支撑板91与第一旋转轴之间过盈配合,以增强第一支撑板91和转动架30之间转动时的阻尼,保证转
动架30相对固定架10旋转时在任意角度的固定,提高支撑装置200对电子设备100在任意角度的稳定支撑。
161.本实施方式中,第二支撑板92与第一支撑板91的结构相同。第二支撑板92与转动架30转动连接,另一端与第二滑杆72转动连接,以在第二滑杆72的带动下相对转动架30转动。具体的,第二支撑板92的一端位于第二缺口303,且与转动架30的主体部分31转动连接,另一端与第二滑杆72的自由端722(如图8所示)转动连接。此外,转动机构230还包括第二旋转轴和第四旋转轴(图未示)。第二支撑板92通过第二旋转轴与转动架30的主体部分31转动连接,并通过第四旋转轴与第二滑杆72转动连接。示例性的,第二支撑板92和转动架30之间通过包圆式转轴过盈配合,即第二支撑板92与第二旋转轴之间过盈配合,以增强第二支撑板92和转动架30之间转动时的阻尼,保证转动架30相对固定架10旋转时在任意角度的固定,提高支撑装置200对电子设备100在任意角度的稳定支撑。
162.请一并参阅图16,图16是图14所示转动机构230在另一种状态下的结构示意图。其中,转动架30与固定架10之间的展开角度在90度至180度之间。
163.当转动架30相对固定架10旋转至展开角度在90度至180度之间时,转动架30、第一支撑板91和第一滑杆71之间形成了稳定的三角形,转动架30、第二支撑板92和第二滑杆72之间形成了稳定的三角形,配合第一支撑板91和转动架30之间的转动阻尼,以及第二支撑板92和转动架30之间的转动阻尼,可实现转动架30相对固定架10在任意角度的固定,进而可以实现支撑装置200对电子设备100在任意角度的支撑。
164.此时,第一支撑板91抵持第一支撑部分32,第二支撑板92抵持第二支撑部分33,可进一步增加三角形的稳定性,实现转动架30相对固定架10在任意角度的固定,进而可以实现支撑装置200对电子设备100在任意角度的支撑。
165.请参阅图17,图17是图3所示支撑装置200中转动机构230在第六种实施方式下的结构示意图。
166.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81、第二连杆82、第一支撑板91和第二支撑板92。
167.转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
168.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
169.第一支撑板91和第二支撑板92分别位于转动轴20的相对两侧。具体的,第一支撑板91连接于转动架30和第一滑杆71之间,第二支撑板92连接于转动架20和第二滑杆72之间。
170.本实施方式所示转动机构230与上述第五种实施方式所示转动机构230的不同之处在于,本实施方式所示转动机构230与上述实施方式所示转动机构230的不同之处在于,转动机构230还包括阻尼器60。示例性的,阻尼器60为弹簧,阻尼器60的弹力方向为x轴方向。具体的,阻尼器60位于第一导轨502,且连接于第一滑块61和第二滑块62之间。其中,阻尼器60的一端连接于第一滑块61的右侧面,另一端连接于第二滑块62的左侧面。转动机构230的展开角度为90度时,阻尼器60处于自由状态。转动架30和固定架10之间的夹角为0度至90度之间时,阻尼器60处于拉伸状态。转动架30和固定架10之间的夹角为90度至180度之间时,阻尼器60处于压缩状态。
171.本实施方式中,阻尼器60的增设可以减少或者释放转动轴20与固定轴40之间的摩擦阻尼,通过阻尼器60和滑槽201的配合,可以为移动终端1000提供足够支撑电子设备100的非线性阻尼,提高支撑装置200对电子设备100的支撑稳定性。此外,阻尼器60的增设还有助于减少转动轴20的直径,从而有助于减低移动终端1000的厚度,有利于实现移动终端1000的轻薄化设计。
172.请参阅图18,图18是图3所示支撑装置200中转动机构230在第七种实施方式下的结构示意图。
173.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81、第二连杆82、第一支撑板91和第二支撑板92。
174.转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
175.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
176.第一支撑板91和第二支撑板92分别位于转动轴20的相对两侧。具体的,第一支撑板91连接于转动架30和第一滑杆71之间,第二支撑板92连接于转动架20和第二滑杆72之间。
177.本实施方式所示转动机构230与上述第六种实施方式所示转动机构230的不同之处在于,阻尼器60有两个。示例性的,两个阻尼器60均为弹簧,两个阻尼器60的弹力方向均沿x轴方向。其中,两个阻尼器60分别为第一阻尼器60a和第二阻尼器60b。具体的,第一阻尼器60a位于第一导轨502,且连接于第一滑块61和第一导轨502的侧壁之间。第二阻尼器60b位于第一导轨502,且连接于第二滑块62和第一导轨502的侧壁之间。其中,第一阻尼器60a的一端连接于第一滑块61的左侧面,另一端连接于第一导轨502的左侧壁。第二阻尼器60b的一端连接于第二滑块62的右侧面,另一端连接于第一导轨502的右侧壁。
178.转动机构230的展开角度为90度时,即转动架30和固定架10之间的夹角为90度时,
第一阻尼器60a和第二阻尼器60b均处于自由状态。转动机构230的展开角度在0度至90度之间时,即转动架30和固定架10之间的夹角在0度至90度之间时,第一阻尼器60a和第二阻尼器60b处于压缩状态,以产生足够的阻尼力与滑槽201的摩擦力共同作用以支撑转动架30,以将转动架30固定在0度至90度之间的任意角度,提高支撑装置200对电子设备100的支撑力,防止由于支撑装置200支撑力不够而导致电子设备100落下或者外翻。
179.本实施方式中,两个阻尼器60的增设可以为转动机构230提供更大的阻尼力,相比于上述第二种实施方式,可减少单一阻尼器60的疲劳,提高转动机构230的疲劳寿命。而且,对称分布的第一阻尼器60a和第二阻尼器60b还有利于增强转动机构230的稳定性,进而有利于提高支撑装置200的支撑稳定性。
180.请参阅图19,图19是图3所示支撑装置200中转动机构230在第八种实施方式下的结构示意图。
181.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81、第二连杆82、第一支撑板91和第二支撑板92。
182.转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
183.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
184.第一支撑板91和第二支撑板92分别位于转动轴20的相对两侧。具体的,第一支撑板91连接于转动架30和第一滑杆71之间,第二支撑板92连接于转动架20和第二滑杆72之间。
185.本实施方式所示转动机构230与上述第六种实施方式所示转动机构230的不同之处在于,阻尼器60有两个。示例性的,两个阻尼器60均为弹簧,两个阻尼器60的弹力方向均沿y轴方向。其中,两个阻尼器60分别为第一阻尼器60a和第二阻尼器60b。具体的,第一阻尼器60a位于第二导轨503,且连接于第一滑杆71和第二导轨503的侧壁之间。第二阻尼器60b位于第三导轨504,且连接于第二滑杆72和第三导轨504的侧壁之间。其中,第一阻尼器60a的一端连接于第一滑杆71的连接端711,另一端连接于第二导轨503的前侧壁。第二阻尼器60b的一端连接于第二滑杆72的连接端721,另一端连接于第三导轨503的前侧壁。
186.转动机构230的展开角度为90度时,即转动架30和固定架10之间的夹角为90度时,第一阻尼器60a和第二阻尼器60b均处于自由状态。转动机构230的展开角度在0度至90度之间时,即转动架30和固定架10之间的夹角在0度至90度之间时,第一阻尼器60a和第二阻尼器60b处于压缩状态,以产生足够的阻尼力与滑槽201的摩擦力共同作用以支撑转动架30,以将转动架30固定在0度至90度之间的任意角度,提高支撑装置200对电子设备100的支撑
力,防止由于支撑装置200的支撑力不够而导致电子设备100落下或者外翻。
187.本实施方式中,两个阻尼器60的增设可以为转动机构230提供更大的阻尼力,相比于上述第二种实施方式,可减少单一阻尼器60的疲劳,提高转动机构230的疲劳寿命。而且,对称分布的第一阻尼器60a和第二阻尼器60b还有利于增强转动机构230的稳定性,有利于提高支撑装置200的支撑稳定性。此外,弹力方向为y轴方向的第一阻尼器60a和第二阻尼器60b,可以提高转动机构230的抗冲击响应速度,增强转动机构230的稳定性,有利于提高支撑装置200的系统稳定性。
188.请参阅图20,图20是图3所示支撑装置200中转动机构230在第九种实施方式下的结构示意图。
189.转动机构230包括固定架10、转动轴20、转动架30、固定轴40、导轨架50、第一滑块61、第二滑块62、第一滑杆71、第二滑杆72、第一连杆81和第二连杆82。转动轴20与固定架10转动连接。转动架300固定连接于转动轴20,可在转动轴20的带动下相对于固定架10转动。固定轴40固定连接于固定架10。转动轴20套设于固定轴40的外表面,以实现与固定架10之间的转动连接。此时,转动机构230处于展开状态。即,转动架30与固定架10之间相对展开。其中,转动架30与固定架10之间的展开角度为90度。
190.导轨架50位于转动轴20的一侧,且与转动轴20和转动架30均间隔设置。第一滑块61、第二滑块62、第一滑杆71和第二滑杆72均滑动安装于导轨架50。第一滑杆71位于第一滑块61远离第二滑块62的一侧,第二滑杆72位于第二滑块62远离第一滑块61的一侧。第一连杆81连接于第一滑块61和第一滑杆71之间,以在第一滑块61的带动下带动第一滑杆71相对导轨架50滑动。第二连杆82连接于第二滑块62和第二滑杆72之间,以在第二滑块62的带动下带动第二滑杆72相对导轨架50滑动。
191.本实施方式所示转动机构230与上述实施方式所示转动机构230的不同之处在于,转动轴230的滑槽201为直线槽。即,滑槽201的延伸方向呈直线。具体的,第一滑块61的滑动臂(图未标)可在第一滑槽201a内相对转动轴20沿直线滑动,第二滑块61的滑动臂(图未标)可在第二滑槽201b内相对转动轴20沿直线滑动。换言之,转动架30相对固定架10转动时,第一滑块61的滑动臂和第二滑块62的滑动臂均相对转动轴20线性滑动,以使第一滑块61和第二滑块62均相对导轨架50线性滑动,从而第一滑杆71和第二滑杆72分别在第一连杆81和第二连杆82的带动下相对导轨架50非线性滑动。
192.当承载有电子设备100的支撑架220相对主机210旋转时,电子设备100与支撑架220的重量所产生的重量阻尼力为f1,两个转动机构230中第一滑杆71和第二滑杆72与导轨架50之间产生的摩擦阻尼力之和为f2。其中,f1<f2,δf=f2‑
f1。需要说明的是,当支撑装置200将电子设备100支撑固定在任意角度时,δf为恒定值,使用者可采用打开或者盖合移动终端1000的过程中,不会感受到阻尼的变化,可实现对移动终端1000的恒力开合,提高使用者的使用体验。
193.请参阅图21,图21是本技术实施例提供的第二种移动终端1000的结构示意图。
194.本实施例中,移动终端1000为笔记本电脑(又可称手提电脑)。移动终端1000包括主机300、显示屏400和转动机构500,转动机构500连接于主机300和显示屏400之间,以实现显示屏400和主机310之间的转动连接。即,显示屏400经转动机构500与主机300转动连接。也即,显示屏400可经转动机构500相对于主机300旋转。
195.本实施例中,转动机构500有两个,两个转动机构500的结构相同,且沿x轴方向间隔排布。主机300可采用上述实施例所示移动终端1000的主机210,转动机构500可采用上述实施例所示移动终端1000的转动机构230,为避免重复,在此不再赘述。其中,转动机构500的固定架10固定连接于主机300的壳体211,转动机构500的转动架30固定连接于显示屏400。在其他一些实施例中,转动机构500也可以为一个或三个以上,本技术实施例对转动机构500的数量不作具体限定。
196.以上,仅为本技术的部分实施例和实施方式,本技术的保护范围不局限于此,任何熟知本领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。