1.本发明涉及控制装置以及控制方法。
背景技术:
2.近几年,开发了根据装置间收发信号的结果进行装置的认证的技术。例如,在下述专利文献1中,公开了在车载设备与便携机之间收发信号从而进行便携机的认证的技术。
3.专利文献1:日本特开平11
‑
208419号公报
4.然而,在现有的技术中,存在根据状况有可能执行不需要的认证处理这样的问题。
技术实现要素:
5.因此,本发明正是鉴于上述问题而完成的,本发明的目的在于提供一种能够抑制不需要的认证处理的执行的、新的并且改进后的控制装置以及控制方法。
6.为了解决上述课题,根据本发明的某观点,提供一种控制装置,其具备:控制部,其进行使用通过与其它装置的通信而得到的信息来认证上述其它装置的认证处理,上述控制部在满足规定的条件的情况下,以不进行上述认证处理的方式进行控制。
7.另外,为了解决上述课题,根据本发明的其它观点,提供一种控制方法,其包含以下步骤:处理器以进行使用通过与其它装置的通信而得到的信息来认证上述其它装置的认证处理的方式进行控制,处理器在满足规定的条件的情况下,以不进行上述认证处理的方式进行控制。
8.如上所述,根据本发明能够抑制不需要的认证处理的执行。
附图说明
9.图1是表示本发明的一实施方式的系统的结构的一个例子的图。
10.图2是表示本实施方式的控制单元的动作处理的流程的一个例子的流程图。
11.图3是表示本实施方式的测距处理的流程的一个例子的时序图。
12.图4是表示本实施方式的变形例的测距处理的流程的一个例子的时序图。
13.图5是表示本实施方式的变形例的控制单元的动作处理的流程的一个例子的流程图。
14.图6是表示本实施方式的变形例的控制单元的动作处理的流程的其它例的流程图。
15.附图标记的说明
16.100
…
便携机,120
…
控制部,110
…
无线通信部,130
…
存储部,200
…
车辆,210
…
控制单元,211
…
无线通信部,213
…
控制部,215
…
存储部。
具体实施方式
17.以下参照附图详细地说明本发明的优选的实施方式。此外,在本说明书以及附图
中,对实际上具有相同的功能结构的结构要素标注相同的附图标记,由此省略重复说明。
18.<1.结构例>
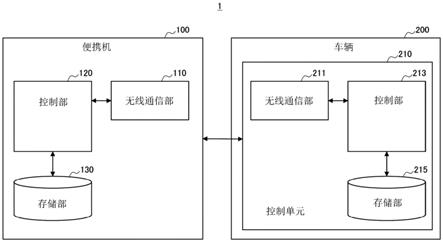
19.图1是表示本发明的一实施方式的系统1的结构的一个例子的图。如图1所示,本实施方式的系统1包含便携机100、以及控制单元210。本实施方式的控制单元210搭载于车辆200。车辆200是作为用户的利用对象之一举出的移动体的一个例子。
20.本发明涉及作为被认证侧的其它装置、以及具备进行使用通过与该其它装置的通信而得到的信息来认证该其它装置的认证处理的控制部的控制装置。在图1所示的例子中,便携机100是其它装置的一个例子,控制单元210是控制装置的一个例子。在系统1中,若用户(例如车辆200的驾驶员)携带便携机100接近车辆200,则在便携机100与车辆200的控制单元210之间进行用于认证的无线通信。而且,若认证成功,则车辆200的门锁被解锁或发动机被启动,车辆200成为能够被用户利用的状态。系统1也被称为智能进入系统。以下,按顺序说明各结构要素。
21.(1
‑
1)便携机100
22.便携机100构成为任意装置。作为任意装置的一个例子,可举出被用户携带并使用的电子钥匙、智能手机以及可穿戴终端等装置。如图1所示,便携机100具备无线通信部110、控制部120、以及存储部130。
23.无线通信部110具有在与控制单元210之间进行符合规定的无线通信标准的通信的功能。在规定的无线通信标准中,使用例如使用了uwb(ultra
‑
wide band:超宽带)的信号。基于uwb的脉冲方式的信号具有能够高精度地进行测距这样的特性。即、基于uwb的脉冲方式的信号使用纳秒以下非常短的脉冲宽度的电波从而能够高精度地测定电波的空中传播时间,能够高精度地进行基于传播时间的测距。这里,测距是指测定收发信号的装置间的距离。
24.无线通信部110收发在测距处理中用于测定装置间的距离的信号。测距处理是用于测定装置间的距离的处理。
25.用于测距处理的信号的一个例子是测距用信号。测距用信号是为了测定装置间的距离而进行收发的信号。测距用信号也是成为计测的对象的信号。例如,对测距用信号的收发所用的时间进行计测。测距用信号例如由不具有存储数据的有效负载部分的帧格式构成。在测距处理中,能够在装置间收发多个测距用信号。在本说明书中,也将多个测距用信号中的、从一个装置向另一个装置发送的测距用信号称为第一测距用信号。而且,也将从接收到第一测距用信号的装置、向发送了第一测距用信号的装置发送的测距用信号称为第二测距用信号。
26.测距用信号能够作为使用了uwb的信号来进行收发。无线通信部110构成为能够进行使用了uwb的信号的通信的通信接口。
27.控制部120具有控制便携机100的整体动作的功能。作为一个例子,控制部120控制无线通信部110进行与控制单元210的通信。另外,控制部120进行从存储部130的信息的读出以及向存储部130的信息的写入。控制部120还作为控制与控制单元210之间进行的认证处理的认证控制部发挥功能。控制部120例如由cpu(central processing unit:中央处理器)以及微处理器等电子电路构成。
28.存储部130具有存储用于便携机100的动作的各种信息的功能。例如,存储部130存
储用于便携机100的动作的程序、以及用于认证的id(identifier:标识符)、密码以及认证算法等。存储部130例如由闪存等存储介质以及执行对存储介质的记录再生的处理装置构成。
29.(1
‑
2)控制单元210
30.控制单元210与车辆200对应地设置。这里,控制单元210搭载于车辆200。作为搭载位置的例子,可举出将控制单元210设置于车辆200的车厢内,或者作为控制模块或者通信模块而内置于车辆200等。此外,也可以将控制单元210设置于车辆200的停车场等,用户的利用对象与控制单元210独立地构成。在该情况下,控制单元210基于与便携机100的通信结果,向车辆200无线发送控制信号,能够远程控制车辆200。如图1所示,控制单元210具备无线通信部211、控制部213以及存储部215。
31.无线通信部211具有在与便携机100之间进行符合规定的无线通信标准的通信的功能。无线通信部211例如构成为能够进行uwb的通信的通信接口。
32.控制部213具有控制控制单元210的整体动作的功能。作为一个例子,控制部213控制无线通信部211而进行与便携机100的通信,进行从存储部215的信息的读出以及向存储部215的信息的写入。控制部213还作为控制在与便携机100之间进行的认证处理的认证控制部发挥功能。另外,控制部213还作为控制车辆200的门锁的门锁控制部发挥功能,进行门锁的锁定以及解锁。另外,控制部213还作为控制设置于车辆200的照明的点亮以及熄灭的照明控制部发挥功能。另外,控制部213还作为控制车辆200的发动机的发动机控制部发挥功能,进行发动机的启动/停止。此外,车辆200所具备的驱动源除了发动机以外,还可以是马达等。控制部213例如构成为ecu(electronic control unit:电子控制单元)。
33.此外,控制部213是控制本发明的控制装置的动作的控制部的一个例子。
34.存储部215具有存储用于控制单元210的动作的各种信息的功能。例如,存储部215存储用于控制单元210的动作的程序以及认证算法等。存储部215例如由闪存等存储介质以及执行对存储介质的记录再生的处理装置构成。
35.<2.技术的课题>
36.关于用于在便携机100与车辆200的控制单元210之间进行的认证的无线通信,不需要的认证处理的执行成为电力消耗的浪费。不需要的认证处理是在装置间无法充分地进行用于认证的信息的收发,在认证失败的可能性高的状况下进行的认证处理。例如,在便携机100不具有为了进行认证处理所需的特定的功能的情况下、在便携机100是不适合进行认证处理的状态的情况下,可以说是认证失败的可能性高的状况。
37.为了进行认证处理所需的特定的功能例如可举出对用于认证处理的信息进行通信的通信部。尽管便携机100不具有该通信部,但控制单元210为了进行用于与便携机100认证的无线通信而发生电力消耗是不优选的。另外,不适合进行认证处理的状态例如可举出便携机100的电池余量少的情况、通信状态差的情况。“便携机100的电池余量少”例如是便携机100的电池余量低于规定值的情况。另外,“通信状态差的情况”例如是用于认证的无线通信的接收功率(即接收到的信号的电力值)、sn比(signal
‑
noise ratio:信噪比)是规定值以下的情况。便携机100的电池余量少的情况下、通信状态差的情况下,若控制单元210要与便携机100之间进行用于认证的无线通信,则便携机100电池用尽而认证失败的可能性高。另外,在便携机100的电池余量少的情况下、通信状态差的情况下,用于认证的信息的收
发未充分的进行,认证失败的可能性高。因此,在便携机100的电池余量少的情况下、通信状态差的情况下,控制单元210欲与便携机100之间进行用于认证的无线通信则成为无用的电力消耗。
38.因此,在本发明中,在满足规定的条件的情况下,控制为不进行认证其它装置的认证处理,从而能够抑制不需要的认证处理的执行,能够减少功耗。
39.<3.动作处理例>
40.接着,参照图2具体地说明本发明的一实施方式的系统1所含的控制单元210的动作处理。图2是表示本实施方式的控制单元210的动作处理的流程的一个例子的流程图。
41.在本实施方式中,作为认证处理的一个例子,执行基于便携机100与控制单元210之间的距离的认证处理。控制单元210通过适当地控制该认证处理的执行,减少便携机100、控制单元210的无用的电力消耗。
42.此外,在本说明书中,“基于距离的认证处理”包含测定便携机100与控制单元210的距离的测距处理、以及基于由该测距处理测定出的距离进行认证的认证处理。关于测距处理,还参考图3详细地说明。在后者的认证处理中,控制单元210根据测定出的距离是否满足规定条件(是用于认证的规定条件,在本说明书中,也称为认证条件)来进行便携机100的认证。例如,若测定出的距离是规定值以下则控制单元210判定为认证成功,在不是这样的情况下,判定为认证失败。另外,若测定出的距离在规定的范围内,则控制单元210也可以判定为用于进行对应的规定的控制的认证的成功。例如,控制单元210在携带便携机100的用户与搭载有控制单元210的车辆200的距离是规定的范围内的情况下,判定为用于进行将设置于车辆200的照明点亮的控制的认证的成功,进行将照明点亮的控制。而且,在用户进一步接近车辆200的情况下,控制单元210也可以判定为用于进行将车辆200的门锁解锁的控制的认证的成功,进行门锁的解锁控制。
43.如图2所示,首先,本实施方式的控制单元210取得用于判定是否执行基于距离的认证处理的规定的信息(步骤s103)。规定的信息例如是与便携机100的特定的功能有关的信息、与便携机100的状态有关的信息。
44.·
关于与便携机100的特定的功能有关的信息
45.与便携机100的特定的功能有关的信息例如可举出表示是否具有对在基于距离的认证处理中使用的信息进行通信的通信部的信息。在认证处理中使用的信息中使用了使用了uwb的信号的情况下,是表示是否便携机100具有能够进行使用了uwb的信号的通信的通信部。
46.控制单元210能够从便携机100取得与便携机100的特定的功能有关的信息。即、便携机100将包含与特定的功能有关的信息的信号向控制单元210发送。
47.在发送包含与特定的功能有关的信息的信号时使用的频带是任意的。例如,包含与特定的功能有关的信息的信号也可以使用与测距用信号相同的频带来发送,也可以使用与测距用信号不同的频带来发送。另外,包含与特定的功能有关的信息的信号可以作为使用了uwb的信号来发送,也可以作为lf频带的信号来发送,也可以作为rf频带的信号来发送,也可以作为ble(bluetooth low energy:低功耗蓝牙(注册商标))的信号来发送。
48.另外,其它任意信号也可以兼作作为包含与特定的功能有关的信息的信号的作用。任意信号的其它一个例子是用于请求响应认证的信号。例如、在基于距离的认证之前,
假设在便携机100与控制单元210之间执行请求响应认证的情况。这里,请求响应认证是认证者(在本实施方式中,作为一个例子是控制单元210)生成认证请求信号并向被认证者(在本实施方式中,作为一个例子是便携机100)发送,被认证者基于认证请求生成认证响应信号并向认证者发送,认证者基于认证响应信号进行被认证者的认证的方式。认证请求信号是随机数,在每次认证时变化,所以请求响应认证对反射攻击具有抗性。另外,认证响应信号基于被认证者的信息而生成。“被认证者的信息”例如是识别便携机100的识别信息(id;identifier(标识符))以及密码等。即、id以及密码本身不被收发,所以减少窃听。除了请求响应认证之外还进行基于距离的认证,从而能够进一步强化安全。例如,在基于距离的认证之前,在便携机100与控制单元210之间执行请求响应认证的情况下,也可以将与特定的功能有关的信息附加于从便携机100发送的认证响应信号中进行发送。
49.另外,与便携机100的特定的功能有关的信息也可以预先存储于存储部215。例如,将识别便携机100的识别信息、和与该便携机100的特定的功能有关的信息相关联地预先存储于存储部215。控制单元210从便携机100接收识别便携机100的识别信息。作为识别信息的取得方法,例如考虑从上述认证响应信号取得的方法。基于这样的识别信息,能够从存储部215取得与由该识别信息识别出的便携机100的特定的功能有关的信息。此外,也可以在存储部215存储有多个识别信息、和与由各个识别信息识别出的各便携机100的特定的功能有关的信息。另外,控制单元210并不限于通过从便携机100发送的识别信息来实现便携机100的识别,也能够通过其它方法来实现。例如,也能够基于从便携机100发送的任意信号的时刻,识别便携机100。也可以在任意信号中使用上述认证响应信号。
50.另外,在本实施方式中,关于与便携机100的特定的功能有关的信息的取得方法,也可以设为采用从上述的便携机100取得的方法、和从存储部215取得的方法中的任一个的结构。例如,控制单元210在无法从便携机100取得与特定的功能有关的信息的情况下,也可以从存储部215取得与特定的功能有关的信息。
51.·
关于与便携机100的状态有关的信息
52.与便携机100的状态有关的信息例如可举出表示便携机100的电池余量的信息。另外,与便携机100的状态有关的信息例如可举出表示便携机100的通信状态的信息。作为表示便携机100的通信状态的信息例如存在用于认证的无线通信的接收功率、sn比等。
53.控制单元210能够从便携机100取得与便携机100的状态有关的信息。即、便携机100将包含与自身的状态有关的信息的信号向控制单元210发送。在发送包含与状态有关的信息的信号时使用的频带、标注与上述与特定的功能有关的信息的发送的情况相同,是任意的。另外,与上述与特定的功能有关的信息的发送的情况相同,其它任意信号也可以兼作作为包含与状态有关的信息的信号的作用。
54.以上,说明了图2的步骤s103所示的规定的信息的取得。
55.接下来,控制单元210判定是否满足规定的条件(步骤s106)。上述规定的条件是用于判定是否执行基于距离的认证处理的条件。具体而言,例如作为该规定的条件可举出与便携机100的特定的功能有关的条件、与便携机100的状态有关的条件。在本实施方式中,作为规定的条件预先规定不执行基于距离的认证处理时的条件。控制单元210基于已取得的与便携机100的特定的功能有关的信息,或者与便携机100的状态有关的信息,判定是否满足该规定的条件。
56.更具体而言,例如作为与便携机100的特定的功能有关的条件,可举出便携机100不具有对在距离的测定中使用的信息进行通信的通信部。通信部例如是能够进行使用了uwb的信号的通信的通信部。另外,例如作为与便携机100的状态有关的条件,可举出便携机100的电池余量低于规定的阈值。另外,例如作为与便携机100的状态有关的条件,可举出便携机100的通信状态没有满足规定的条件。“便携机100的通信状态没有满足规定的条件”例如是用于认证的无线通信的接收功率、sn比(signal
‑
no ise ratio:信噪比)是规定值以下的情况等。在满足这样的条件的情况下,在认证中使用的信息的收发无法充分地进行,认证失败的可能性高,产生无用的功耗。因此,将这样的条件规定为不执行基于距离的认证处理时的条件。
57.接着,在判定为满足规定的条件的情况下(步骤s106/是),控制单元210不执行基于距离的认证处理(步骤s112)。由此,控制单元210能够抑制不需要的认证处理的执行,能够减少功耗。基于距离的认证处理如上所述,包含测定便携机100与控制单元210的距离的测距处理、以及基于由该测距处理测定出的距离来进行认证的认证处理。控制单元210例如也可以不进行在测距处理中使用的信息的收发,从而不执行基于距离的认证处理。“不进行在测距处理中使用的信息的收发”也可以说是不执行通信。另外,“不执行基于距离的认证处理”也可以说是将基于距离的认证处理设为不执行。更具体而言,控制单元210也可以通过不向无线通信部211供给电力,而不执行通信。另外,控制单元210也可以通过不从无线通信部211发送在测距处理中使用的规定的信号,而将通信置为不执行。另外,控制单元210也可以通过不从无线通信部211接收在测距处理中使用的规定的信号,而不执行通信。作为不接收信号的例子,可举出不进行接收到的信号的取样、不将取样取得的信息向后段处理(控制部213)输出等。信号的取样是获取信号。后段处理是使用获取的信号的处理。还参照图3来说明测距处理的详细内容。
58.另一方面,在判定为不满足规定的条件的情况下(步骤s106/否),控制单元210执行基于距离的认证处理(步骤s109)。
59.这里,参照图3来说明步骤s109以及步骤s112所示的“基于距离的认证处理”所含的测距处理。
60.·
测距处理
61.图3是表示本实施方式的测距处理的流程的一个例子的时序图。首先,控制单元210发送第一测距用信号(步骤s153)。
62.接着,便携机100若从控制单元210接收第一测距用信号,则在从接收到第一测距用信号之后经过时间δt2之后,发送第二测距用信号(步骤s156)。时间δt2是预先规定的时间。时间δt2设定为比假定为在便携机100中为了进行从接收第一测距用信号之后到发送第二测距用信号为止的处理所需的时间长。由此,能够在接收第一测距用信号之后经过时间δt2之前可靠地结束第二测距用信号的发送准备。另外,时间δt2也可以在控制单元210中是已知的。
63.接着,控制单元210若接收第二测距用信号,则计算便携机100与控制单元210之间的距离(步骤s159)。详细地说,控制单元210计测从第一测距用信号的发送时刻到第二测距用信号的接收时刻的时间δt1,基于计测出的δt1与已知的时间δt2来计算距离。控制单元210将从δt1减去δt2而得到的值除以2从而计算单程的信号收发所需的时间,对所需的
energy:低功耗蓝牙(注册商标))的信号发送。
73.如图4所示,首先,控制单元210发送第一通知信号(步骤s203)。
74.接下来,便携机100若接收第一通信信号,则发送第二通知信号(步骤s206)。
75.接着,控制单元210若接收第二通知信号,则以向等待测距触发信号的接收的接收等待状态迁移的方式进行控制(步骤s209)。向接收等待状态迁移的时刻可以是接收到认证响应信号时,也可以是基于认证响应信号进行便携机100的认证的期间,也可以是该认证结束后。另外,可以是接收到对唤醒信号的响应时,也可以是判定接收到的响应是否是ack信号的期间,也可以是该判定结束后。控制单元210根据唤醒信号的响应、请求响应认证,使接收等待开始,从而能够缩短接收等待期间。
76.另外,在迁移到接收等待状态为止(开始接收等待为止),例如控制为不进行天线接收到的信号的取样的状态、或者不进行基于取样而得到的信号的处理的状态等使接收等待状态停止的状态。“不进行基于取样而得到的信号的处理的状态”例如是不将取样而得到的信息向后段处理发送的状态。在本说明书中将这样的状态也称为通常状态。通常状态的功耗比接收等待状态小。因此,根据唤醒信号的响应、请求响应认证来进行接收等待的开始,从而能够缩短接收等待期间,能够减少功耗。
77.接下来,便携机100发送测距触发信号(步骤s212)。在测距触发信号中例如利用使用了uwb的信号。
78.接着,控制单元210若接收测距触发信号,则作为第一测距用信号,发送请求第二测距用信号的发送的测距请求信号(步骤s215)。接收等待期间在接收测距触发信号的时刻结束。即、控制单元210若接收测距触发信号,则接着以向发送测距请求信号的发送状态迁移的方式进行控制。发送状态是执行将测距请求信号作为电波从天线送出的各种处理的状态。各种处理例如可举出发送的信号的生成、基于发送的信号的调制以及从天线的电波的发送等。
79.接下来,便携机100在控制单元210接收测距请求信号(第一测距用信号)时,从接收测距请求信号起经过时间δt2之后,作为第二测距用信号发送响应测距请求信号的测距响应信号(步骤s218)。
80.接着,控制单元210在接收测距响应信号(第二测距用信号)时,计算便携机100与控制单元210之间的距离(步骤s221)。详细地说,控制单元210计测从第一测距用信号的发送时刻到第二测距用信号的接收时刻的时间δt1,基于计测出的δt1与已知的时间δt2来计算距离。
81.以上,对在测距用信号的收发之前,接收测距触发信号的测距处理进行了什么。控制单元210当接收测距触发信号时,进行作为第一测距用信号发送测距请求信号的处理。这里,控制单元210也可以在判定为满足图2的步骤s106所示的规定的条件的情况下,即使从便携机100接收到测距触发信号,也不发送测距请求信号,从而不执行基于距离的认证处理。是否满足规定的条件的判定可以在向接收等待状态迁移的控制之前进行,也可以在之后进行,也可以并列地进行。另外,用于判定是否满足规定的条件的规定的信息例如也可以附加于第二通知信号。
82.另外,控制单元210在判定为满足图2的步骤s106所示的规定的条件的情况下,也可以不控制为接收等待状态,或使接收等待状态停止(返回通常状态),从而不执行图2的步
骤s112所示的基于距离的认证处理。控制单元210可以在向接收等待状态迁移的控制之前进行、也可以在之后进行、也可以并列地进行规定的条件的判定。能够通过缩短或者不产生接收等待期间,来减少功耗。特别是在测距触发信号使用了uwb的信号情况下,功耗减少的效果显著。具体而言,在接收侧的取样频率根据载波的频率的最大值而设定时,uwb的特征是频带非常宽,所以接收侧的功耗大。因此,在uwb中,缩短功耗大的接收等待期间、不控制为该接收等待状态,从而能够大幅减少控制单元210的功耗。
83.以下,参照图5以及图6并使用多个具体例来说明这样通过控制向接收等待状态的迁移来减少功耗的动作处理。
84.(第一具体例)
85.图5是表示本实施方式的变形例的控制单元210的动作处理的流程的一个例子的流程图。如图5所示,控制单元210取得用于判定是否执行基于距离的认证处理的规定的信息(步骤s303)。规定的信息例如也可以附加于从便携机100发送的第二通知信号。规定的信息的详细内容与图2的步骤s103所示的处理中说明的情况相同,所以省略这里的说明。
86.接下来,控制单元210判定是否满足规定的条件(步骤s306)。规定的条件的详细内容与图2的步骤s106所示的处理中说明的情况相同,所以省略这里的说明。
87.接着,在判定为满足规定的条件的情况下(步骤s306/是),控制单元210不进行向等待测距触发信号的接收的接收等待状态的控制,从而控制为不执行基于距离的认证处理(步骤s312)。“不进行向接收等待状态的控制”换言之,是不开始接收等待。另外,不进行向接收等待状态的控制,更具体而言可举出不进行由天线接收到的信号的取样,或者不进行基于取样而得到的信号的处理的状态(例如,不将取样而得到的信息向后段处理发送的状态)等。
88.由此,在满足规定的条件的情况下不设为接收等待状态,从而能够抑制不需要的认证处理的执行,能够减少功耗。满足规定的条件的情况如上所述,例如是便携机100不具有能够进行在测距处理中使用的信号(包含测距触发信号)的收发的通信部的情况。在该情况下,控制单元210即使开始测距触发信号的接收等待,也不从便携机100发送测距触发信号,接收等待期间的功耗变得浪费。因此,控制单元210在满足规定的条件的情况下,不设为接收等待状态,从而能够减少功耗。另外,在满足规定的条件的情况下,不执行基于距离的认证处理,但控制单元210也可以根据请求响应认证等其它方法的认证的结果来进行各种控制。“各种控制”例如是车辆200的门锁的解锁、发动机的启动等控制。
89.另一方面,在判定为不满足规定的条件的情况下(步骤s306/否),控制单元210进行向等待测距触发信号的接收的接收等待状态的控制,从而执行基于距离的认证处理(步骤s309)。由此,能够在适当的环境下的情况下执行基于距离的认证,能够不浪费接收等待中的功耗。
90.(第二具体例)
91.图6是表示本实施方式的变形例的控制单元210的动作处理的流程的其它例的流程图。如图6所示,控制单元210取得用于判定是否执行基于距离的认证处理的规定的信息(步骤s353)。规定的信息例如也可以附加于从便携机100发送的第二通知信号。规定的信息的详细内容与图2的步骤s103所示的处理中说明的情况相同,所以省略这里的说明。
92.接下来,控制单元210进行向等待测距触发信号的接收的接收等待状态的控制,从
而执行基于距离的认证处理(步骤s356)。控制单元210可以在任意时刻进行向上述接收等待状态的控制。“任意时刻”例如是从便携机100发送出的第二通知信号的接收等。因此,向该接收等待状态的控制也可以与上述步骤s353所示的规定的信息的取得并列地进行,或者在其前后进行。
93.接着,控制单元210判定是否满足规定的条件(步骤s359)。规定的条件的详细内容与图2的步骤s106所示的处理中说明的情况相同,所以省略这里的说明。
94.而且,在判定为满足规定的条件的情况下(步骤s359/是),控制单元210使等待测距触发信号的接收的接收等待状态停止(解除),即、进行向通常状态返回的控制,从而不执行基于距离的认证处理(步骤s362)。接收等待状态的停止更具体而言,可举取消由天线接收到的信号的取样,或者取消基于取样而得到的信号的处理等。“取消基于取样而得到的信号的处理”例如可举出取消将取样而得到的信息向后段处理发送。这样停止接收等待状态的状态是被称为通常状态的状态。由此,例如能够不等待超时而结束接收等待期间,特别是在使用了uw的情况下,能够大幅度减少功耗。上述“不等待超而结束”具体而言是指不等待到经过预先规定的恒定期间之前而结束。
95.这样,在图6所示的例子中,在进行是否满足规定的条件的判定之前,能够以任意时刻控制为接收等待状态。由此,能够不等待是否满足规定的条件的判定,以更早的阶段向接收等待状态迁移,另一方面,在满足规定的条件的情况下能够迅速停止接收等待状态而减少功耗。
96.<5.补充>
97.以上,虽参照附图详细地说明了本发明的优选的实施方式,但本发明并不限于上述例子。显然,只要具有本发明所属技术领域的普通知识的人就能够在技术方案所记载的技术思想的范畴内做出各种变更例或者修正例,这些当然也被理解为属于本发明的技术范围。
98.例如,在上述实施方式中,虽说明了认证者侧发送第一测距用信号的例子,但本发明并不限于上述例子。认证者侧例如是车辆200的控制单元210。例如,被认证者侧也可以发送第一测距用信号。被认证者侧例如是便携机100。控制单元210若从便携机100接收第一测距用信号,则作为第一测距用信号的响应发送第二测距用信号。便携机100若接收第二测距用信号,则计测从第一测距用信号的发送时刻到第二测距用信号的接收时刻的时间δt1。接着,便携机100发送包含将表示计测出的δt1的信息加密后的信息的数据信号。另一方,控制单元210计测从第一测距用信号的接收时刻到第二测距用信号的发送时刻的时间δt2。而且,控制单元210若从便携机100接收数据信号,则基于由从便携机100接收到的数据信号表示的δt1、与计测出的δt2来计算便携机100与控制单元210之间的距离。例如,通过将δt1
‑
δt2除以2来计算单程的信号收发所需的时间,对上述时间乘以信号的速度,从而计算便携机与通信单元之间的距离。这样,在使第一测距用信号与第二测距用信号的收发的方向相反的情况下,控制单元210进行向等待从便携机100发送的第一测距用信号的等待状态迁移的控制。向等待第一测距用信号的等待状态的迁移能够在任意时刻进行。控制单元210即使在这样的情况下,也进行是否满足上述步骤s106所示的规定的条件的判定,在满足规定的条件的情况下,取消或者停止向等待第一测距用信号的等待状态的迁移,从而能够减少功耗。
99.另外,在上述实施方式中,作为规定的条件,虽规定了用于判定是否执行基于距离的认证处理的条件,但本发明并不限于此。例如,也可以规定用于判定是否执行请求响应认证等其它认证处理的条件。在满足上述条件的情况下,控制单元210不执行对应的其它认证处理,从而能够减少功耗。
100.另外,在上述实施方式中,虽对被认证者是便携机100,认证者是车辆200的控制单元210的例子进行了说明,但本发明并不限于上述例子。便携机100以及车辆200的控制单元210的作用也可以相反,作用也可以被动态地更换。另外,车辆200的控制单元210彼此也可以进行测距以及认证。
101.此外,例如在上述实施方式中,虽对本发明适用于智能进入系统的例子进行了说明,但本发明并不限于上述例子。本发明能够适用于通过收发信号进行测距以及认证的任意系统。例如,作为用户利用的对象物,可举出无人机、车辆、船舶、飞机、建築物、机器人、储物柜、家电制品等。建築物包含住宅等。另外,本发明能够适用于包含便携机、车辆、船舶、飞机、智能手机、无人机、建築物、机器人、储物柜以及家电制品等中的任意两个装置的对。此外,对可以包含两个相同种类的装置,也可以包含两个不同种类的装置。在该情况下,一个装置作为第一通信装置进行动作,另一个装置作为第二通信装置进行动作。
102.另外,例如在上述实施方式中,虽例举了作为无线通信标准使用uwb的情况,但本发明并不限于上述例子。例如,作为无线通信标准,也可以使用红外线。
103.另外,例如在上述中,虽对控制部213构成为ecu,控制控制单元210的整体动作的情况进行了说明,但本发明并不限于上述例子。例如,无线通信部211也可以包含ecu。而且,无线通信部211也可以执行判定是否满足规定的条件的处理、控制向接收等待状态的迁移的处理。另外,无线通信部211也可以执行进行基于对从天线接收到的信号进行取样而得到的信号的处理的处理。“基于对从天线接收到的信号进行取样而得到的信号的处理”例如,可举出判定是否是所希望的信号的处理。
104.此外,在本说明书中说明的各装置的一系列处理也可以使用软件、硬件以及软件与硬件的组合中的任一个来实现。构成软件的程序例如预先存储在设置于各装置的内部或者外部的记录介质(非暂时介质:non
‑
transitory media)。而且,各程序例如在计算机的执行时被读入ram,由cpu等处理器执行。上述记录介质例如是磁盘、光盘、光磁盘、闪存等。另外,上述计算机程序也可以不具有记录介质,例如经由网络进行分发。
105.另外,在本说明书中使用时序图、流程图说明的处理也可以未必以图示的顺序来执行。几个处理步骤也可以并列地执行。另外,也可以采用追加的处理步骤,也可以省略一部分的处理步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。