1.本发明涉及手套包装技术领域,具体为一种一副一包手套自动化袋装设备。
背景技术:
2.手套根据用途以及材质分为多类,其中有用于手部保温的、有用于手部装饰的,有用于手部防护的,有用于防静电的,还有用于医疗防污、防菌、防尘的等;因此,手套广泛应用于生活、出行、劳动、运动、工业等等各个方面。
3.手套在生产完成后,需要进行包装,通常都是采用人为手动包装,但手动包装浪费人力,且效率较低,为此我们提出一种一副一包手套自动化袋装设备。
技术实现要素:
4.本发明的目的在于提供一种一副一包手套自动化袋装设备,以解决上述背景技术中现有手套包装时,采用人力包装,效率较低的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种一副一包手套自动化袋装设备,包括机架以及plc控制器,所述机架上安装有用于单次吸取一个包装袋的取袋单元,所述取袋单元的一侧安装有用于将取袋单元取出的包装袋传送走的送袋单元,所述机架上安装有手套输送单元和手套装袋单元,所述手套装袋单元设置在手套输送单元的上方,所述手套装袋单元的一端安装有用于将包装袋口部张开的袋子张口单元,所述袋子张口单元的一侧与所述送袋单元对齐,所述手套输送单元、取袋单元、送袋单元、袋子张口单元以及手套装袋单元均受控于所述plc控制器。
7.作为优选,上述所述手套输送单元包括传送架,所述传送架的两侧均通过连接块固定连接在机架上,所述传送架上安装有传送链条以及用于驱动传送链条运动的传送电机,所述传送链条上安装有用于放置手套的放料槽。
8.作为优选,上述所述取袋单元包括有立杆,所述立杆的顶部固定连接有顶板,所述顶板上开设有取袋口,且所述顶板的上部表面固定安装有围绕取袋口设置的挡袋条,所述立杆的下部固定连接有横杆,所述横杆的一侧固定安装有竖直设置的取料气缸,所述取料气缸的活塞杆一端连接有取料板,所述取料板的上部表面固定安装有取料吸盘,所述取料板设置在所述取袋口的正下方。
9.作为优选,上述所述送袋单元包括固定连接在立杆一侧的支撑板,所述支撑板的一侧通过水平轨道滑动安装有滑动板,所述支撑板的一侧平行安装有电动推杆,所述电动推杆活塞杆的一端与所述滑动板固定连接,所述滑动板的一侧安装有水平气缸和竖直轨道,所述竖直轨道的上下两端均滑动安装有l形架,两个l形架相对的侧面上均安装有夹料吸盘,所述水平气缸活塞杆的一端分别通过连杆与两个l形架活动连接。
10.作为优选,上述所述手套装袋单元包括支撑架,所述支撑架的一侧固定安装有升降气缸,所述升降气缸活塞杆的一端固定安装有水平设置的线性电机,所述线性电机的滑动块一侧固定连接有推送板。
11.作为优选,上述所述袋子张口单元包括固定安装在支撑架一侧的旋转电机以及固定安装在支撑架一端的齿轮箱,所述旋转电机的转轴与齿轮箱的动力输入轴连接,且齿轮箱的动力输出轴通过连接柱固定连接有旋转盘,所述旋转盘上安装有张开机构,所述旋转盘上位于张开机构的两侧均开设有通孔,所述支撑架的顶部一端固定安装有顶推气缸,所述顶推气缸的活塞杆端部固定连接有与所述通孔对齐的顶杆。
12.作为优选,上述所述张开机构包括贯穿旋转盘的张开板,所述张开板的一侧固定连接有l形杆,所述l形杆的通过销轴转动安装在固定板上,所述固定板固定安装在旋转盘上,所述固定板的表面固定连接有复位弹簧,所述复位弹簧的一端固定连接在l形杆的一侧。
13.作为优选,上述所述取料吸盘以及夹料吸盘均设置为气动吸盘,所述plc控制器的控制输出端分别与所述传送电机、取料气缸、取料吸盘、电动推杆、水平气缸、夹料吸盘、升降气缸、线性电机、旋转电机、顶推气缸的电控端连接。
14.作为优选,上述所述传送电机以及旋转电机均设置为步进电机。
15.作为优选,上述所述机架上还安装有接料传送带,所述接料传送带设置在袋子张口单元的侧下方。
16.与现有技术相比,本发明的有益效果是:
17.本技术在使用时,将包装袋叠放在取袋口上的挡袋条之间,通过取袋单元从叠放的包装袋底部抓取一个包装袋,并通过送袋单元将包装袋转移至袋子张口单元处,通过袋子张口单元将包装袋的口部张开,再通过手套装袋单元将手套输送单元上对应位置的手套推入到包装袋内,并将包装袋推掉,掉落在接料传送带传送走,完成包装;本技术全程自动化装袋工作,减少了人力操作,且提高了工作效率。
附图说明
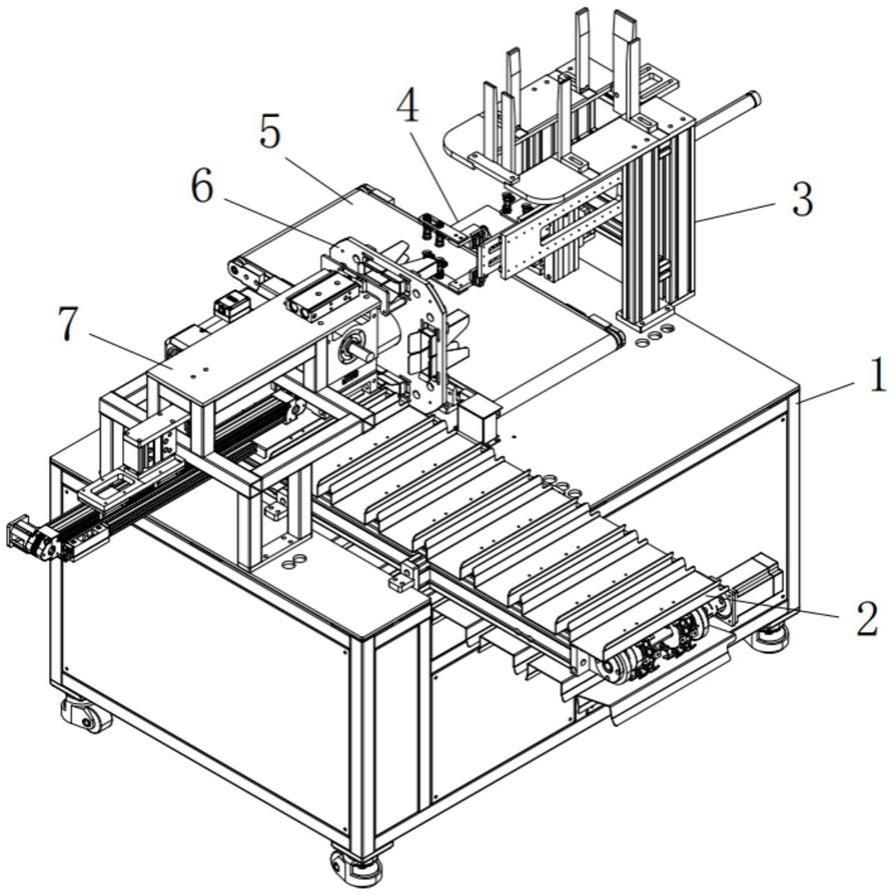
18.图1为本发明的结构示意图;
19.图2为本发明手套输送单元的结构示意图;
20.图3为本发明取袋单元及送袋单元的结构示意图;
21.图4为本发明取袋单元的结构示意图;
22.图5为本发明送袋单元的结构示意图;
23.图6为本发明袋子张口单元及手套装袋单元的结构示意图;
24.图7为本发明袋子张口单元及手套装袋单元的另一视角结构示意图;
25.图8为本发明旋转盘的结构示意图;
26.图9为本发明旋转盘的另一视角结构示意图;
27.图10为本发明图9中的a部放大结构示意图。
28.图中:1、机架;2、手套输送单元;3、取袋单元;4、送袋单元;5、接料传送带;6、袋子张口单元;7、手套装袋单元;
29.201、传送架;202、连接块;203、传送链条;204、传送电机;205、放料槽;
30.301、立杆;302、顶板;303、取袋口;304、挡袋条;305、横杆;306、取料气缸;307、取料板;308、取料吸盘;
31.401、支撑板;402、电动推杆;403、水平轨道;404、滑动板;405、竖直轨道;406、l形
架;407、夹料吸盘;408、水平气缸;409、连杆;
32.601、旋转电机;602、齿轮箱;603、连接柱;604、旋转盘;605、张开机构;606、顶推气缸;607、顶杆;6041、通孔;6051、l形杆;6052、固定板;6053、张开板;6054、复位弹簧;
33.701、支撑架;702、升降气缸;703、线性电机;704、推送板。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.实施例1
36.请参阅图1
‑
10,本发明提供一种技术方案:
37.一种一副一包手套自动化袋装设备,包括机架1以及plc控制器,机架1上安装有用于单次吸取一个包装袋的取袋单元3,取袋单元3的一侧安装有用于将取袋单元3取出的包装袋传送走的送袋单元4,机架1上安装有手套输送单元2和手套装袋单元7,手套装袋单元7设置在手套输送单元2的上方,手套装袋单元7的一端安装有用于将包装袋口部张开的袋子张口单元6,袋子张口单元6的一侧与送袋单元4对齐,手套输送单元2、取袋单元3、送袋单元4、袋子张口单元6以及手套装袋单元7均受控于plc控制器。
38.如图2中所示,手套输送单元2包括传送架201,传送架201的两侧均通过连接块202固定连接在机架1上,传送架201上安装有传送链条203以及用于驱动传送链条203运动的传送电机204,传送链条203上安装有用于放置手套的放料槽205。
39.在实施时,若干放料槽205等间距安装在传送链条203上,传送电机204为步进电机,每次步进移动后,均有一个放置有手套的放料槽205与推送板704对齐。
40.如图3和图4所示,取袋单元3包括有立杆301,立杆301的顶部固定连接有顶板302,顶板302上开设有取袋口303,且顶板302的上部表面固定安装有围绕取袋口303设置的挡袋条304,立杆301的下部固定连接有横杆305,横杆305的一侧固定安装有竖直设置的取料气缸306,取料气缸306的活塞杆一端连接有取料板307,取料板307的上部表面固定安装有取料吸盘308,取料板307设置在取袋口303的正下方。
41.在工作时,将包装袋叠放在取袋口303上,取料气缸306上升使得取料吸盘308穿过取袋口303与包装袋抵触,开启取料吸盘308吸住一个包装袋,然后取料气缸306回缩,完成取料;注意实施时,取料吸盘308至少设置4个。
42.如图3和图5所示,送袋单元4包括固定连接在立杆301一侧的支撑板401,支撑板401的一侧通过水平轨道403滑动安装有滑动板404,支撑板401的一侧平行安装有电动推杆402,电动推杆402活塞杆的一端与滑动板404固定连接,滑动板404的一侧安装有水平气缸408和竖直轨道405,竖直轨道405的上下两端均滑动安装有l形架406,两个l形架406相对的侧面上均安装有夹料吸盘407,水平气缸408活塞杆的一端分别通过连杆409与两个l形架406活动连接。
43.上述设计,工作时,电动推杆402回缩,使得上下两组夹料吸盘407分别位于包装袋的上下两侧,然后水平气缸408回缩,使得夹料吸盘407夹住包装袋,然后开启夹料吸盘407,
从上下两侧分别吸住包装袋,然后水平气缸408伸长,上下两组夹料吸盘407分别向上、向下移动,使得包装袋的口部初步张开;然后电动推杆402伸长,将包装袋送至袋子张口单元6处。
44.如图6所示,手套装袋单元7包括支撑架701,支撑架701的一侧固定安装有升降气缸702,升降气缸702活塞杆的一端固定安装有水平设置的线性电机703,线性电机703的滑动块一侧固定连接有推送板704。
45.工作时,升降气缸702使得线性电机703能够上下移动位置,使得推送板704落入或抬升出放料槽205,而线性电机703用于驱动推送板704推送和回缩。
46.如图6
‑
图10所示,袋子张口单元6包括固定安装在支撑架701一侧的旋转电机601以及固定安装在支撑架701一端的齿轮箱602,旋转电机601的转轴与齿轮箱602的动力输入轴连接,且齿轮箱602的动力输出轴通过连接柱603固定连接有旋转盘604,旋转盘604上安装有张开机构605,旋转盘604上位于张开机构605的两侧均开设有通孔6041,支撑架701的顶部一端固定安装有顶推气缸606,顶推气缸606的活塞杆端部固定连接有与通孔6041对齐的顶杆607。上述设计,利用旋转盘604能够旋转转换工位,使得位于上方的一个工位进行张开操作,位于下方的一个工位进行装袋操作。
47.如图8、图9和图10所示,张开机构605包括贯穿旋转盘604的张开板6053,张开板6053上设置有便于推送板704和手套穿过的贯通缺口;张开板6053的一侧固定连接有l形杆6051,l形杆6051的通过销轴转动安装在固定板6052上,固定板6052固定安装在旋转盘604上,固定板6052的表面固定连接有复位弹簧6054,复位弹簧6054的一端固定连接在l形杆6051的一侧。
48.在工作时,顶推气缸606的活塞杆端部的顶杆607穿过通孔6041,并抵触l形杆6051使得张开板6053的端部收拢;通过送袋单元4将包装袋口部套在张开板6053收拢的端部上,然后顶推气缸606回缩,在复位弹簧6054的作用下,使得包装袋的口部完全张开。
49.具体的,取料吸盘308以及夹料吸盘407均设置为气动吸盘,plc控制器的控制输出端分别与传送电机204、取料气缸306、取料吸盘308、电动推杆402、水平气缸408、夹料吸盘407、升降气缸702、线性电机703、旋转电机601、顶推气缸606的电控端连接。传送电机204以及旋转电机601均设置为步进电机。机架1上还安装有接料传送带5,接料传送带5设置在袋子张口单元6的侧下方。在实施时,各个设备均有plc控制器进行控制,可以实现自动化操作,十分方便。
50.具体的工作过程:
51.s1、人工将包装袋叠放在取袋口303上,将手套放入到放料槽205上;
52.s2、通过plc控制器启动各个设备,首先取料气缸306上升,使得取料吸盘308抵触在叠放的包装袋底部,然后开启取料吸盘308吸住一个包装袋,然后取料气缸306回缩,完成取料;
53.s3、电动推杆402回缩,使得上下两组夹料吸盘407分别位于包装袋的上下两侧,然后水平气缸408回缩,开启夹料吸盘407,使得夹料吸盘407分别吸住包装袋的上下两侧,然后水平气缸408伸长,使得上下两组夹料吸盘407分别向上、向下移动,初步张开包装袋;
54.s4、顶推气缸606伸长,使得顶杆607穿过通孔6041并抵触l形杆6051,使得张开板6053的端部收拢;
55.s5、电动推杆402伸长,将初步张开的包装袋送至并套在张开板6053收拢的端部,然后顶推气缸606缩回,在复位弹簧6054的作用下,张开板6053复位将包装袋的口部完全张开;同时,夹料吸盘407关闭,释放包装袋;而后电动推杆402回缩;
56.s6、旋转电机601启动并旋转,使得带有包装袋的张开机构605与其中一个放料槽205对齐;
57.s7、升降气缸702伸长,使得线性电机703下落,推送板704落入到放料槽205内,然后线性电机703带动推送板704将手套穿过张开板6053推送入包装袋内,并一直将包装袋从张开板6053上推掉,掉落在接料传送带5上被传送走;
58.s8、线性电机703带动推送板704回位,升降气缸702回缩,使得推送板704抬升高出放料槽205;而后,传送电机204步进一次,将另一放有手套的放料槽205移动到待装袋工位上,依次循环生产。
59.综上,本技术除了s1步骤的人工操作外,s2
‑
s8均由plc控制器控制自动化完成,减少了人力操作,且提高了工作效率。
60.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。