1.本发明涉及物流仓储设备相关领域,尤其涉及一种多功能穿梭车。
背景技术:
2.近年来,由于电商、物流等行业中被存储货物的数量的增多,仓库也逐步向着自动化方向发展。自动化立体仓库也称自动存储系统,是一种用高层立体货架存储物资,用自动控制堆垛机或搬运车存取作业,用计算机控制管理的仓库。自动化立体仓库除了具有传统仓库的基本功能外,还具有分拣、理货的功能,以及在不直接进行人工处理的情况下,自动存储和取出物料的功能。
3.agv(自动导引运输车)和rgv(有轨制导车辆)是自动化物流体系中不可或缺的一部分。agv主要用于在地面上进行工作,其车架上装有电磁设备以及自动引导装置,能根据设定好的路线在地面上行驶及搬运货物。rgv可以自动搬运货物,不需要人工进行操作,但其一般用于在高密度存储货架上行驶及搬运货物。
4.在现有技术的自动化立体仓库中,为了将位于地面上的货物存储至货架上,一般先需要agv按照预定的行走轨迹将存放在地面上的货物运输至存储目的,然后再借助于rgv将货物存放至货架的相应存储位,对于该自动化立体仓库,其不仅具有在地面上行驶的agv,还具有在货架上行驶的rgv;对于大型仓库,若想满足存储需要求就需要大量的搬运设备,因而提高了成本以及搬运设备的故障率。因此,如何降低自动化立体仓库的成本是亟待解决的技术问题。
5.可以双模式运行,降低成本减少提交,结构紧凑,并且能够具有较高的刚性和车体强度,便于加工和装配。但是如何将多个车轮,多个传动系统和动力系统集成在一个体积相对较小的车体内,在现有技术中没有一个较好的解决方案,尤其没有将agv和rgv以及托盘升降传动操作机构集成在一起的较为优选的能够实现多功能的设计方案和布置方案。
技术实现要素:
6.有鉴于此,本发明提供了一种多用途穿梭车,所述穿梭车包括车架、电池、电机、传动机构、控制模块和行驶轮组,所述行驶轮组可以包括:第一轮组,所述第一轮组布置在所述车架的左右两侧,用于与布置在第一高度的第一基面接触,所述第一轮组包括同步驱动的第一行驶轮;第二轮组,所述第二轮组也布置在所述车架的左右两侧;用于与布置在第二高度的第二基面接触的第二轮组,所述第二轮组包括同步或异步驱动的第二驱动轮和第二从动轮;其中所述第一行驶轮的下沿高于所述第二行驶轮的下沿并且小于所述第一基面和第二基面之间的高度差。
7.优选地,在根据本公开内容的穿梭车中,穿梭车的第一轮组和第二轮组的各个轮轴以可移动或者不可移动的方式安装在所述车架。
8.进一步优选地,其中,所述车架包括组成矩形的位于外侧的左梁、右梁、前梁和后梁,所述车架还包括设置在所述左梁、右梁、前梁和后梁内侧的第一竖梁、第二竖梁、第三竖
梁、第四竖梁和设置在车架中部的t形梁;其中所述第一竖梁、第二竖梁临近并且平行于所述左梁布置,所述第三竖梁和第四竖梁临近并且平行于所述右梁布置;所述t形梁包括横向中梁和纵向中梁,所述横向中梁布置于所述车架纵向中线与所述后梁之间的大致中间位置处,所述横向中梁的两端分别连接至第二竖梁和第三竖梁,所述纵向中梁的两端连接至所述横向中梁和所述前梁;其中所述车架被分成多个安装仓,包括:由左梁、第一竖梁、前梁和后梁围绕而成的左侧外仓;由第一竖梁、第二竖梁、前梁和后梁围绕而成的左侧内仓;由第三竖梁、第四竖梁、前梁和后梁围绕而成的右侧内仓;由第四竖梁、右梁、前梁和后梁围绕而成的右侧外仓;由第二竖梁、纵向中梁、前梁和横向中梁围绕而成的中前左仓;由纵向中梁、第三竖梁、前梁和横向中梁围绕而成的中前右仓以及由第二竖梁、第三竖梁、横向中梁和后梁围绕而成的中后仓。
9.在根据本公开内容的穿梭车的一个优选实施方式中,所述穿梭车还包括用于驱动所述第一轮组的第一动力单元、用于驱动所述第二轮组的第二驱动轮的第二动力单元和用于驱动所述穿梭车的托板升降的第三动力单元。可选地,所述第二动力单元可以包括布置在中前左仓内并且悬置安装在第二竖梁的左侧电机,和布置在中前右仓内并且悬置安装在第三竖梁的右侧电机。
10.优选地,第二轮组的左侧行走轮安装在所述左侧内仓的中部,所述第二轮组的右侧行走轮安装在所述右侧内仓的中部;所述第一轮组的行走轮安装在所述左梁外侧或所述右梁外侧,所述第一轮组的传动机构分别布置在左侧外仓和右侧外仓内。
11.在前述穿梭车的一个优选实施方式中,所述第三动力单元可以包括悬置安装在纵向中梁的升降驱动电机和由所述升降驱动电机通过升降传动系驱动的前驱动轴和后驱动轴;所述前驱动轴横穿所述纵向中梁连接至车辆前部的两个升降驱动模块;所述后驱动轴通过安装在横向中梁的固定架固定,连接至车辆后部的另外两个升降驱动模块;其中升降驱动电机与所述前驱动轴、所述后驱动轴通过一个沿着纵向中梁布置的传动带或传动链条来同步传递动力。
12.在穿梭车中,车辆前部的两个升降驱动模块和车辆后部的另外两个升降驱动模块为:左前升降驱动模块、左后升降驱动模块、右前升降驱动模块和右后升降驱动模块;其中左前升降驱动模块和左后升降驱动模块布置在所述左侧内仓,所述右前升降驱动模块和右后升降驱动模块布置在右侧内仓内。
13.优选地,在穿梭车的一个实施方式中,左前升降驱动模块、左后升降驱动模块、右前升降驱动模块和右后升降驱动模块被同步驱动,并且均为齿轮齿条构造。
14.进一步优选地,其特征在于,所述搬运车还包括至少两组减震机构,至少两组所述减震机构对称设置在所述第二驱动轮的两侧。
15.根据本公开内容的穿梭车,可以实现具有多种功能,不仅能够在轨道上行驶,也能够在地面行驶,同时还能够实现诸如托盘货物的取放,通过独特设计的布局和安装方案,能够在狭小空间内实现强度大,占用空间小、运载能力强和集成度高的穿梭车构造。
16.本发明实施例所公开的穿梭车,其车架不仅具有第一轮组,还具有第二轮组以及导向轮,因而其可直接将位于地面上的货物输送至货架的相应存储位,在整个自动化智能仓库中均避免了采用叉车、输送线、agv等设备,因而降低了自动化仓库的运行成本,并减少了设备的故障率。
17.本发明的附加优点、目的,以及特征将在下面的描述中将部分地加以阐述,且将对于本领域普通技术人员在研究下文后部分地变得明显,或者可以根据本发明的实践而获知。本发明的目的和其它优点可以通过在书面说明及其权利要求书以及附图中具体指出的结构实现到并获得。
18.本领域技术人员将会理解的是,能够用本发明实现的目的和优点不限于以上具体所述,并且根据以下详细说明将更清楚地理解本发明能够实现的上述和其他目的。
附图说明
19.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的限定。附图中的部件不是成比例绘制的,而只是为了示出本发明的原理。为了便于示出和描述本发明的一些部分,附图中对应部分可能被放大,即,相对于依据本发明实际制造的示例性装置中的其它部件可能变得更大。在附图中:
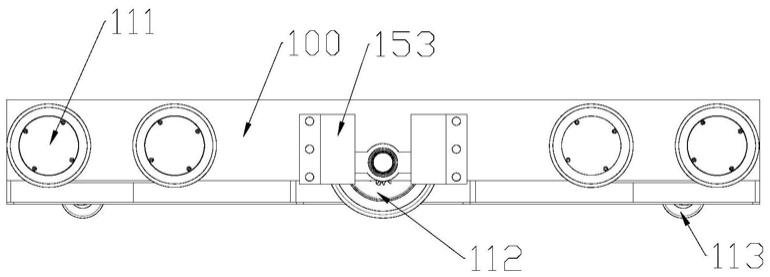
20.图1为根据本公开内容的一个具体方式的穿梭车的侧视示意图;
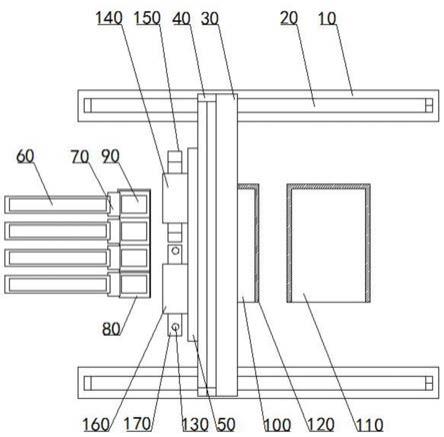
21.图2为根据本公开内容的一个具体方式的穿梭车的车架结构的俯视示意图;
22.图3为根据本公开内容的穿梭车中的减震机构的一个实施例的结构示意图;以及
23.图4为图3所示的减震机构拆去封装外壳的结构示意图。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
25.在此,需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
26.应该强调,术语“包括/包含/具有”在本文使用时指特征、要素、步骤或组件的存在,但并不排除一个或更多个其它特征、要素、步骤或组件的存在或附加。
27.在此,还需要说明的是,本说明书内容中所出现的“上部”、“下部”等方位名词是相对于附图所示的位置方向;如果没有特殊说明,术语“连接”、“安装”和“布置”在本文不仅可以指直接的形式,也可以表示存在中间物的间接形式。例如,直接连接为两个零部件之间不借助中间部件进行连接,间接连接为两个零部件之间借助其他零部件进行连接。
28.根据本公开内容的一个方面,提出了一种多用途穿梭车,该穿梭车可以用于立体仓库的搬运中,可以用于不同基面的行驶和搬运。
29.具体地,在根据本公开内容的一个实施方式的穿梭车中,例如如图1和图2所示,穿梭车包括车架100、电池、电机、传动机构、控制模块和行驶轮组,行驶轮组可以包括:第一轮组,所述第一轮组布置在车架100的左右两侧,用于与布置在第一高度的第一基面接触,第一轮组包括同步驱动的第一行驶轮111;第二轮组,第二轮组也布置在车架的左右两侧;第二轮组用于与布置在第二高度的第二基面接触,第二轮组包括同步或异步驱动的第二驱动轮112和第二从动轮113;其中第一行驶轮112的下沿高于第二行驶轮111的下沿并且小于第一基面和第二基面之间的高度差。
30.优选地,在根据本公开内容的穿梭车中,第一轮组和第二轮组的各个轮轴以可移动或者不可移动的方式安装在车架。
31.在图2所示的实例中,车架100包括组成矩形的位于外侧的左梁bl、右梁br、前梁bf和后梁bb。车架100还包括设置在左梁、右梁、前梁和后梁内侧的第一竖梁b1、第二竖梁b2、第三竖梁b3、第四竖梁b4和设置在车架中部的t形梁;其中第一竖梁b1、第二竖梁b2临近并且平行于左梁bl布置,第三竖梁b3和第四竖梁b4临近并且平行于右梁br布置;t形梁包括横向中梁bh和纵向中梁bv,横向中梁bh布置于车架纵向中线与后梁bb之间的大致中间位置处,横向中梁bh的两端分别连接至第二竖梁b2和第三竖梁b3,纵向中梁bv的两端连接至横向中梁bh和前梁bf;其中车架100被分成多个安装仓,包括:由左梁、第一竖梁、前梁和后梁围绕而成的左侧外仓;由第一竖梁、第二竖梁、前梁和后梁围绕而成的左侧内仓;由第三竖梁、第四竖梁、前梁和后梁围绕而成的右侧内仓;由第四竖梁、右梁、前梁和后梁围绕而成的右侧外仓;由第二竖梁、纵向中梁、前梁和横向中梁围绕而成的中前左仓vm01;由纵向中梁、第三竖梁、前梁和横向中梁围绕而成的中前右仓vm03以及由第二竖梁、第三竖梁、横向中梁和后梁围绕而成的中后仓vm03。.
32.在根据本公开内容的穿梭车的一个优选实施方式中,穿梭车还包括用于驱动第一轮组的第一动力单元、用于驱动第二轮组的第二驱动轮的第二动力单元和用于驱动穿梭车的托板升降的第三动力单元。
33.可选地,第二动力单元可以包括布置在中前左仓vm01内并且悬置安装在第二竖梁b2的左侧电机m01,和布置在中前右仓内并且悬置安装在第三竖梁的右侧电机m02。
34.优选地,第二轮组的左侧行走轮112安装在左侧内仓的中部,第二轮组的右侧行走轮112安装在右侧内仓的中部;第一轮组的行走轮111安装在左梁外侧或右梁外侧,第一轮组的传动机构t01分别布置在左侧外仓和右侧外仓内。
35.在前述穿梭车的一个优选实施方式中,第三动力单元可以包括悬置安装在纵向中梁的升降驱动电机m03和由升降驱动电机通过升降传动系t03驱动的前驱动轴s01和后驱动轴s02。前驱动轴s01横穿纵向中梁bv连接至车辆前部的两个升降驱动模块;后驱动轴s02通过安装在横向中梁bh的固定架固定,连接至车辆后部的另外两个升降驱动模块;其中升降驱动电机m03与前驱动轴s01、后驱动轴s02通过一个沿着纵向中梁布置的传动带或传动链条来同步传递动力。
36.在穿梭车中,以视图中所示车架的方向为参照,纸面的上方为车架前部,纸面下方为车架后部,车辆前部的两个升降驱动模块和车辆后部的另外两个升降驱动模块为:左前升降驱动模块、左后升降驱动模块、右前升降驱动模块和右后升降驱动模块。其中左前升降驱动模块和左后升降驱动模块布置在左侧内仓,右前升降驱动模块和右后升降驱动模块布置在右侧内仓内。
37.优选地,在穿梭车的一个实施方式中,左前升降驱动模块、左后升降驱动模块、右前升降驱动模块和右后升降驱动模块被同步驱动,并且均为齿轮齿条构造。
38.优选地,左梁bl、右梁br、前梁bf和后梁bb可以为刚性板。各个升降驱动模块是通过一个驱动电机,也即升降驱动电机m03来同步驱动的。
39.例如,在根据本公开内容的穿梭车的一个实例中,第一轮组例如可以用于在立体仓库的货架轨道上行驶,第一轮组包括位于车架两侧的第一行驶轮。第二轮组可以用于在
仓库地面的第二基面上行驶,第二轮组包括位于车架底部的第二驱动轮以及第二从动轮。托板固定在升降驱动模块的顶部。
40.优选地,穿梭车还可以设置有轨道导向轮,与第一行驶轮位于车架的同侧,且轨道导向轮位于车架的底部,轨道导向轮的固定轴与所述第一行驶轮的固定轴垂直。
41.穿梭车还可以包括固定在车体的传感器。
42.在一个优选实施方式中,穿梭车的第二驱动轮通过减震机构连接至车架。在该实例中,减震机构可以包括:轴承组件,所述轴承组件包括轴承座和位于所述轴承座内部的轴承,所述轴承用于套置在所述第二驱动轮的固定轴上,所述轴承座上具有沿竖直方向贯通的第一导向孔;导向轴,所述导向轴的一端固定在所述车架上,所述导向轴的另一端穿过所述第一导向孔,以使所述轴承座可沿所述导向轴移动;弹簧,所述弹簧的顶端与所述车架相接,所述弹簧的底端与所述轴承座相接。
43.图2为本发明一实施例的穿梭车的拆去托板以及顶板后的结构示意图,其中穿梭车的车架100整体形状可为方形结构,且示例性的为长方形。第一轮组包括第一行驶轮111,第二轮组包括第二驱动轮112及第二从动轮,第一行驶轮111用于使该穿梭车可沿货架的轨道行驶,第二驱动轮112用于使穿梭车在地面上行驶,而第二从动轮在第二驱动轮112着地时或转弯时起到支撑作用。示例性的,第二从动轮可选用万向轮113。其中第一行驶轮111位于车架100的两侧,如图2所示,第一行驶轮111的数量可为四对,四对第一行驶轮111可对称设置在车架100的两侧。第二驱动轮112的数量具体的为两个,两个第二驱动轮112位于车架100的底部,用于支撑车架100以离开地面。两个第二驱动轮112通过不同的电机进行驱动,此时当两个电机的输出轴同向及同速旋转时,该穿梭车在地面上前进或后退;而当两个电机的输出轴反向且差速旋转时,该穿梭车即实现转弯。
44.在该实施例中,第一行驶轮与第二驱动轮之间还具有高度差,以使穿梭车在行驶过程中避免行驶轮组互相干涉。万向轮113的数量具体的可为四个,该四个万向轮113也位于车架100的底部且被固定在车架100上,四个万向轮113具体的可相对于车架100的对称中心面互相对称设置。
45.对于具有第二驱动轮112和第一行驶轮111的该穿梭车,既可以在轨道上行驶,也可在地面上行驶,且其行驶轮组可通过同一行驶轮驱动系统进行驱动,也可通过不同的行驶轮驱动系统进行驱动。示例性的,位于车架100两侧的第一行驶轮111也通过用于驱动两个第二驱动轮112的两个电机进行驱动,即各电机用于驱动两组第一行驶轮111;在此情况下,由于搬运车的第一行驶轮111及第二驱动轮112不会同时工作,因而可在电机的输出轴与第一行驶轮111之间添加离合器。除上述之外,第一行驶轮111及第二驱动轮112也可采用不同的行驶轮驱动系统进行驱动;示例性的,两个第二驱动轮112分别通过两个电机进行驱动,该两个电机不仅可使搬运车在地面上前进及后退,也可使搬运车在地面上进行转弯;另外,四组第一行驶轮111可通过单独的一个电机进行驱动,当四组第一行驶轮111通过同一个电机进行驱动时,四组第一行驶轮111之间可借助于链传动机构实现传动;应当理解的是,四组第一行驶轮111除了通过同一个电机驱动之外,也可通过两个或更多个电机进行驱动。
46.在上述实施例中,升降驱动部件121可以为齿轮齿条机构。
47.在本发明一实施例中,该穿梭车还可以包括轨道导向轮(附图中未示出),轨道导
向轮位于车架100的底部,且轨道导向轮与第一行驶轮111位于车架100的同侧,轨道导向轮的固定轴与第一行驶轮111的固定轴垂直。
48.当穿梭车从地面搬运了货物运输至货架上时,由于地面的行驶路径与货架上的行驶轨道不同,穿梭车刚进入货架的轨道行驶时,可能会出现车架100歪斜的情况,若不及时调整车架100的行驶角度,会造成车架100撞击货架轨道或卡死的情况,严重时会发生安全事故。而轨道导向轮即解决了这一问题,其在当穿梭车从地面转入货架轨道行驶后,会及时的调整搬运车的行驶角度,从而保证搬运车可沿货架轨道稳定的行驶。
49.具体的,轨道导向轮的数量至少为四个,且车架100的设有第一行驶轮111的两侧分别设有两个轨道导向轮,各侧的两个轨道导向轮分别前后间隔距离设置。该轨道导向轮的旋转轴沿车架100的高度方向竖直设置,以使轨道导向轮可绕竖直轴进行旋转。另外,轨道导向轮还应位于其对应的第一行驶轮111的内侧,且位于车架100两侧的轨道导向轮最外侧之间的距离应稍小于两侧轨道之间的距离,从而保证第一行驶轮111沿货架轨道的顶面行驶,而轨道导向轮沿货架轨道的侧面行驶。
50.在本发明另一实施例中,该穿梭车的车架上还设置有用于连接车轮的减震机构。例如,减震机构可以对称设置在第二驱动轮112的两侧。减震机构具体的包括轴承组件、导向轴和弹簧154。如图3和图4所示,轴承组件包括轴承座156和轴承151,在实际使用时,轴承151套置在车轮的支撑轴上,且轴承151位于轴承座156的内部,即轴承151位于车轮支撑轴与轴承座156之间。轴承座156上具有沿其竖直方向贯通的第一导向孔,导向轴的一端穿过该第一导向孔,而导向轴的另一端则固定在搬运车的车架100上。该设置可使轴承座156沿导向轴上下移动,因此第一导向孔的孔径可稍大于导向轴的直径。另外。导向轴的一端固定在车架100上,是为了在轴承座156沿导向轴上下移动时,防止导向轴随轴承座156同步运动。弹簧154的顶端具体的与搬运车的车架100相接,而弹簧154的底端与轴承座156相接,换句话说,即弹簧154位于轴承座156与车架100之间。
51.在该实施例中,车架100是固定的,因而其端部与车架100固定连接的导向轴也是固定的;而由于弹簧154的顶端与车架100相接,底端与轴承座156相接,因而弹簧154在轴承座156的顶升力作用下会产生变形,且当轴承座156下降至原位时恢复原形。该方案解决了穿梭车在不平整地面行走时由于车轮颠簸导致货物倾斜的问题,因而提高了穿梭车平稳搬运货物的能力。
52.进一步的,该减震机构还包括弹簧支撑轴155,弹簧支撑轴155用于作为弹簧154的固定轴,且弹簧154被套置在弹簧支撑轴155上。此时轴承座156上还具有沿竖直方向贯通的第一通孔,弹簧支撑轴155与导向轴类似的,其相对于车架100也是固定不动的,即其一端固定在车架100上,而另一端穿过轴承座156的第一通孔。此设置在轴承座156上下颠簸时,确保弹簧154沿弹簧支撑轴155的轴向方向产生形变。另外,在车轮平稳行驶状态下,导向轴与弹簧支撑轴155的端部均位于轴承座156的底部,且导向轴与弹簧支撑轴155的端部还均具有防止轴承座156从其上松脱的轴端挡环。
53.除上述之外,减震机构还包括封装外壳153,该封装外壳153用于封装弹簧154及导向轴,封装外壳153固定在车架上,且导向轴及弹簧支撑轴155的端部均与所述封装外壳153的顶壁固定连接。封装外壳153进一步起到了防尘的作用,从而保护了减震弹簧154。示例性的,如图3所示,封装外壳153整体为矩形形状,其可具有多个螺栓安装孔,从而使封装外壳
153通过螺钉或螺栓固定在车架100的侧板上。在具有封装外壳153的实施例中,由于封装外壳153与车架100固定连接,因而也可直接将导向轴以及弹簧支撑轴155的端部直接固定在封装外壳153上。
54.对于该实施例,当穿梭车搬运了货物并在不平整的地面上行走时,由于各个主动车轮均具有减震机构,因而减弱了车架以及托板上货物的颠簸,提高了搬运车的平稳性,因而防止了货物倾斜现象的发生,进而提高了搬运效率。
55.本发明中,针对一个实施方式描述和/或例示的特征,可以在一个或更多个其它实施方式中以相同方式或以类似方式使用,和/或与其他实施方式的特征相结合或代替其他实施方式的特征。
56.上述所列实施例,显示和描述了本发明的基本原理与主要特征。本公开内容提供了一种多用途穿梭车,还提供了关于电机、传动轴、传动轴和布置和方案的方案,能够提供更加紧凑和更加便于制造和安装的车架构造。但本发明不受上述实施例的限制,本领域技术人员在没有做出创造性劳动的前提下对本发明做出的修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。