技术特征:
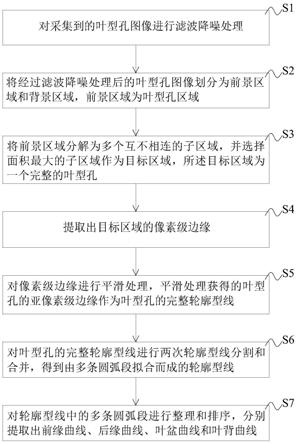
1.一种叶型孔图像的轮廓型线提取与分割方法,其特征在于,包括以下内容:对采集到的叶型孔图像进行滤波降噪处理;将经过滤波降噪处理后的叶型孔图像划分为前景区域和背景区域,前景区域为叶型孔区域;将前景区域分解为多个互不相连的子区域,并选择面积最大的子区域作为目标区域,所述目标区域为一个完整的叶型孔;提取出目标区域的像素级边缘;对像素级边缘进行平滑处理,平滑处理获得的叶型孔的亚像素级边缘作为叶型孔的完整轮廓型线;对叶型孔的完整轮廓型线进行两次轮廓型线分割和合并,得到由多条圆弧段拟合而成的轮廓型线;对轮廓型线中的多条圆弧段进行整理和排序,分别提取出前缘曲线、后缘曲线、叶盆曲线和叶背曲线。2.如权利要求1所述的叶型孔图像的轮廓型线提取与分割方法,其特征在于,所述对叶型孔的完整轮廓型线进行两次轮廓型线分割和合并,得到由多条圆弧段拟合而成的轮廓型线的过程具体包括以下内容:采用ramer算法并设定第一距离阈值对叶型孔的完整轮廓型线进行第一次分割,将其分割成若干条轮廓段,并将每条轮廓段用一条直线段来替代;采用圆弧方程对相邻两条轮廓段的数据点进行第一次拟合以得到一条圆弧段,若拟合得到的圆弧段与这两条轮廓段之间的最大距离小于等于相应的两条直线段与这两条轮廓段之间的最大距离,则采用圆弧段替代相邻的两条轮廓段,否则,仍然采用两条直线段来替代相应的两条轮廓段,不断迭代,整个叶型孔轮廓型线被分割成多条轮廓段,每条轮廓段用直线段或者圆弧段替代;采用ramer算法并设定第二距离值对第一次拟合过程中用直线段替代的那些轮廓段进行第二次分割,将其分割为新的轮廓段,并将每条新的轮廓段用直线段来替代,其中,第二距离值小于第一距离值;采用圆弧方程对第二次分割得到的新的轮廓段进行第二次迭代拟合,最终得到由多条圆弧段拟合而成的轮廓型线。3.如权利要求2所述的叶型孔图像的轮廓型线提取与分割方法,其特征在于,所述采用圆弧方程对相邻的两条轮廓段进行第一次拟合以得到一条圆弧段的过程具体包括以下内容:设相邻两条轮廓段上的数据点的坐标分别为(u1,v1)、(u2,v2)、
…
、(u
n
,v
n
),其中,(u1,v1)和(u
n
,v
n
)分别为起点坐标和终点坐标,n为两条轮廓段上的数据点数目,则在二维平面坐标系o
‑
uv中,圆弧方程的表达式为:(u
‑
u0)2 (v
‑
v0)2=r2,u∈[u1,u
n
]且v∈[v1,v
n
]其中,u0、v0和r为未知数,(u0,v0)为圆弧段所在圆周的圆心坐标,r为圆弧所在圆周的半径,由数据点(u1,v1)、(u2,v2)、
…
、(u
n
,v
n
)和圆弧方程的表达式构成如下目标函数f:
基于最小二乘法求解出使目标函数f取得极小值的u0、v0和r,从而得到由相邻的两条轮廓段上的数据点拟合而成的圆弧段。4.如权利要求1所述的叶型孔图像的轮廓型线提取与分割方法,其特征在于,所述对轮廓型线中的多条圆弧段进行整理和排序,分别提取出前缘曲线、后缘曲线、叶盆曲线和叶背曲线的过程具体包括以下内容:以各个圆弧段的最小外接矩形左上角的行坐标按升序排列,则排在最后的圆弧段即为前缘曲线;以各个轮廓段的最小外接矩形右上角的列坐标按升序排列,则排在最后的圆弧段为后缘曲线;将前缘曲线和后缘曲线从轮廓型线中分离出来,将剩余的相邻轮廓段进行联合,得到叶盆曲线和叶背曲线。5.一种叶型孔图像的轮廓型线提取与分割系统,其特征在于,包括:滤波模块,用于对采集到的叶型孔图像进行滤波降噪处理;区域划分模块,用于将经过滤波降噪处理后的叶型孔图像划分为前景区域和背景区域,前景区域为叶型孔区域;区域分解模块,用于将前景区域分解为多个互不相连的子区域,并选择面积最大的子区域作为目标区域,所述目标区域为一个完整的叶型孔;边缘提取模块,用于提取出目标区域的像素级边缘;边缘处理模块,用于对像素级边缘进行平滑处理,平滑处理获得的叶型孔的亚像素级边缘作为叶型孔的完整轮廓型线;轮廓型线分割模块,用于对叶型孔的完整轮廓型线进行两次轮廓型线分割和合并,得到由多条圆弧段拟合而成的轮廓型线;轮廓型线提取模块,用于对轮廓型线中的多条圆弧段进行整理和排序,分别提取出前缘曲线、后缘曲线、叶盆曲线和叶背曲线。6.如权利要求5所述的叶型孔图像的轮廓型线提取与分割系统,其特征在于,所述轮廓型线分割模块具体包括:第一分割单元,用于采用ramer算法并设定第一距离阈值对叶型孔的完整轮廓型线进行第一次分割,将其分割成若干条轮廓段,并将每条轮廓段用一条直线段来替代;第一拟合单元,用于采用圆弧方程对相邻两条轮廓段的数据点进行第一次拟合以得到一条圆弧段,若拟合得到的圆弧段与这两条轮廓段之间的最大距离小于等于相应的两条直线段与这两条轮廓段之间的最大距离,则采用圆弧段替代相邻的两条轮廓段,否则,仍然采用两条直线段来替代相应的两条轮廓段,不断迭代,整个叶型孔轮廓型线被分割成多条轮廓段,每条轮廓段用直线段或者圆弧段替代;第二分割单元,用于采用ramer算法并设定第二距离值对第一次拟合过程中用直线段替代的那些轮廓段进行第二次分割,将其分割为新的轮廓段,并将每条新的轮廓段用直线段来替代,其中,第二距离值小于第一距离值;第二拟合单元,用于采用圆弧方程对第二次分割得到的新的轮廓段进行第二次迭代拟合,最终得到由多条圆弧段拟合而成的轮廓型线。7.如权利要求6所述的叶型孔图像的轮廓型线提取与分割系统,其特征在于,第一拟合
单元和第二拟合单元采用圆弧方程对相邻两条轮廓段进行拟合得到圆弧段的过程包括以下内容:设相邻两条轮廓段上的数据点的坐标分别为(u1,v1)、(u2,v2)、
…
、(u
n
,v
n
),其中,(u1,v1)和(u
n
,v
n
)分别为起点坐标和终点坐标,n为两条轮廓段上的数据点数目,则在二维平面坐标系o
‑
uv中,圆弧方程的表达式为:(u
‑
u0)2 (v
‑
v0)2=r2,u∈[u1,u
n
]且v∈[v1,v
n
]其中,u0、v0和r为未知数,(u0,v0)为圆弧段所在圆周的圆心坐标,r为圆弧所在圆周的半径,由数据点(u1,v1)、(u2,v2)、
…
、(u
n
,v
n
)和圆弧方程的表达式构成如下目标函数f:基于最小二乘法求解出使目标函数f取得极小值的u0、v0和r,从而得到由相邻的两条轮廓段上的数据点拟合而成的圆弧段。8.如权利要求5所述的叶型孔图像的轮廓型线提取与分割系统,其特征在于,所述轮廓型线提取模块包括:前缘曲线提取单元,用于以各个圆弧段的最小外接矩形左上角的行坐标按升序排列,则排在最后的圆弧段即为前缘曲线;后缘曲线提取单元,以各个轮廓段的最小外接矩形右上角的列坐标按升序排列,则排在最后的圆弧段为后缘曲线;叶盆和叶背曲线提取单元,用于将前缘曲线和后缘曲线从轮廓型线中分离出来,将剩余的相邻轮廓段进行联合,得到叶盆曲线和叶背曲线。9.一种设备,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器通过调用所述存储器中存储的所述计算机程序,用于执行如权利要求1~4任一项所述的方法的步骤。10.一种计算机可读取的存储介质,用于存储对叶型孔图像进行轮廓型线提取与分割的计算机程序,其特征在于,所述计算机程序在计算机上运行时执行如权利要求1~4任一项所述的方法的步骤。
技术总结
本发明公开了一种叶型孔图像的轮廓型线提取与分割方法及系统、设备、存储介质,所述叶型孔图像的轮廓型线提取与分割方法通过对叶型孔图像进行滤波降噪、区域划分、目标区域确定、像素级边缘提取、边缘平滑、两次轮廓型线分割与合并、轮廓型线提取等步骤,获取了完整的叶型孔轮廓型线并进一步将其分割为前缘曲线、后缘曲线、叶盆曲线和叶背曲线,为后续的叶型孔轮廓型线参数计算奠定基础,保证检测的准确性。其中,通过第一次轮廓型线分割可以将较大直径的圆弧段有效地分割出来,而通过第二次轮廓型线分割可以将较小直径的圆弧段分割出来,并且可以细化较大直径的圆弧段末端,可以实现更加精确的轮廓型线分割,并达到较高的算法效率。率。率。
技术研发人员:盛波 皮克松 郑学著 郑琪 毕超 郝雪 黄倩
受保护的技术使用者:中国航发南方工业有限公司
技术研发日:2021.09.09
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。