1.本实用新型属于自动焊接技术领域,具体涉及一种多位智能焊接机器人工艺布置。
背景技术:
2.焊接加工是常见的机械加工工位,随着自动化程度的提高,部分焊接工位使用焊接机器人替换了常规的人工焊接操作,现有技术中,每个焊接机器人的焊接区域为单个工作区,其虽然也可以满足市场的需求,但是其会大大增加加焊接机器人的数量,从而增加了成本,而且也造成较大的资源浪费,故而适用性和实用性受到限制。
技术实现要素:
3.本实用新型的目的是提供一种结构设置合理且适用性强的多位智能焊接机器人工艺布置。
4.实现本实用新型目的的技术方案是一种多位智能焊接机器人工艺布置,包括工作区和两个焊接机器人,所述工作区包括设置在同一直线上且结构相同的四个工作台,在中间两个工作台的侧部固定有调节轨道,所述调节轨道上设置有两个调节滑块,所述调节滑块上设置有驱动电机,两个焊接机器人的底架分别固定在两个调节滑块上,且焊接机器人处于工作台的正上方,所述工作台上均匀设置有送料滚筒和与所述送料滚筒通过皮带相连接的控制电机,所述调节轨道与所述送料滚筒成垂直设置,所述调节滑块的侧部固定有控制连网端口,所述调节滑块在所述调节轨道上平移,带动所述焊接机器人在所述工作台之间移动实现焊接位置调节。
5.四个工作台包括两端的组对工作台和中间两个焊接工作台,所述调节轨道的长度与中间两个工作台的总长度相同,所述调节轨道与所述工作台的边沿之间设置有避位缓冲区。
6.所述送料滚筒上设置有工件放置模具。
7.所述工作台的底部设置有调节支脚,且相邻工作台之间设置有缓冲间隙。
8.本实用新型具有积极的效果:本实用新型的结构设置合理,其设置有调节轨道,并且在调节轨道上设置有调节滑块,将焊接机器人设置在调节滑块上,从而使焊接机器人可以实现往复平移,提高了焊接机器人的操作区域,有利于减少焊接机器的人使用,降低了成本,同时采用四个工作台,配合送料滚筒,此布置有利于提高工效,使用稳定可靠,适用性强且实用性好。
附图说明
9.为了使本实用新型的内容更容易被清楚的理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中:
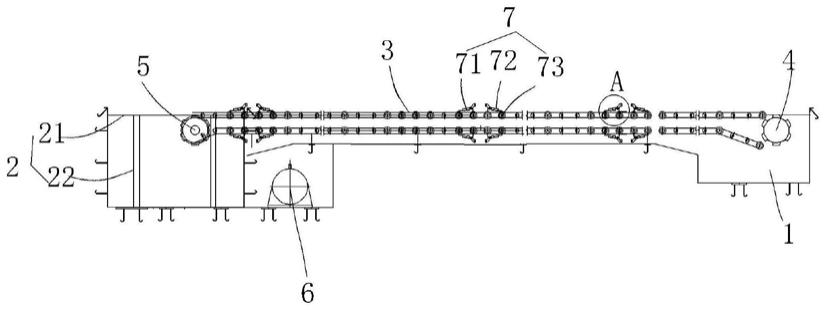
10.图1为本实用新型的结构示意图。
具体实施方式
11.(实施例1)
12.图1显示了本实用新型的一种具体实施方式,其中图1为本实用新型的结构示意图。
13.见图1,一种多位智能焊接机器人工艺布置,包括工作区和两个焊接机器人1,所述工作区包括设置在同一直线上且结构相同的四个工作台2,在中间两个工作台的侧部固定有调节轨道3,所述调节轨道上设置有两个调节滑块4,所述调节滑块上设置有驱动电机5,两个焊接机器人的底架分别固定在两个调节滑块上,且焊接机器人处于工作台的正上方,所述工作台上均匀设置有送料滚筒6和与所述送料滚筒通过皮带相连接的控制电机7,所述调节轨道与所述送料滚筒成垂直设置,所述调节滑块的侧部固定有控制连网端口8,所述调节滑块在所述调节轨道上平移,带动所述焊接机器人在所述工作台之间移动实现焊接位置调节。
14.四个工作台包括两端的组对工作台和中间两个焊接工作台,所述调节轨道的长度与中间两个工作台的总长度相同,所述调节轨道与所述工作台的边沿之间设置有避位缓冲区9。
15.所述送料滚筒上设置有工件放置模具10。
16.所述工作台的底部设置有调节支脚11,且相邻工作台之间设置有缓冲间隙12。
17.本实用新型的结构设置合理,其设置有调节轨道,并且在调节轨道上设置有调节滑块,将焊接机器人设置在调节滑块上,从而使焊接机器人可以实现往复平移,提高了焊接机器人的操作区域,有利于减少焊接机器的人使用,降低了成本,同时采用四个工作台,配合送料滚筒,此布置有利于提高工效,使用稳定可靠,适用性强且实用性好。
18.本实施例中使用的标准零件可以从市场上直接购买,而根据说明书记载的非标准结构部件,也可以直接根据现有的技术常识毫无疑义的加工得到,同时各个零部件的连接方式采用现有技术中成熟的常规手段,而机械、零件及设备均采用现有技术中常规的型号,故在此不再作出具体叙述。
19.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而这些属于本实用新型的实质精神所引伸出的显而易见的变化或变动仍属于本实用新型的保护范围。
技术特征:
1.一种多位智能焊接机器人工艺布置,包括工作区和两个焊接机器人,其特征在于:所述工作区包括设置在同一直线上且结构相同的四个工作台,在中间两个工作台的侧部固定有调节轨道,所述调节轨道上设置有两个调节滑块,所述调节滑块上设置有驱动电机,两个焊接机器人的底架分别固定在两个调节滑块上,且焊接机器人处于工作台的正上方,所述工作台上均匀设置有送料滚筒和与所述送料滚筒通过皮带相连接的控制电机,所述调节轨道与所述送料滚筒成垂直设置,所述调节滑块的侧部固定有控制连网端口,所述调节滑块在所述调节轨道上平移,带动所述焊接机器人在所述工作台之间移动实现焊接位置调节。2.根据权利要求1所述的多位智能焊接机器人工艺布置,其特征在于:四个工作台包括两端的组对工作台和中间两个焊接工作台,所述调节轨道的长度与中间两个工作台的总长度相同,所述调节轨道与所述工作台的边沿之间设置有避位缓冲区。3.根据权利要求2所述的多位智能焊接机器人工艺布置,其特征在于:所述送料滚筒上设置有工件放置模具。4.根据权利要求3所述的多位智能焊接机器人工艺布置,其特征在于:所述工作台的底部设置有调节支脚,且相邻工作台之间设置有缓冲间隙。
技术总结
本实用新型公开了一种多位智能焊接机器人工艺布置,包括工作区和两个焊接机器人,工作区包括设置在同一直线上且结构相同的四个工作台,在中间两个工作台的侧部固定有调节轨道,调节轨道上设置有两个调节滑块,调节滑块上设置有驱动电机,两个焊接机器人的底架分别固定在两个调节滑块上,工作台上均匀设置有送料滚筒和与送料滚筒通过皮带相连接的控制电机,调节轨道与送料滚筒成垂直设置,调节滑块的侧部固定有控制连网端口。本实用新型的结构设置合理,使焊接机器人可以实现往复平移,提高了焊接机器人的操作区域,有利于减少焊接机器的人使用,降低了成本,此布置有利于提高工效,适用性强且实用性好。适用性强且实用性好。适用性强且实用性好。
技术研发人员:候中印 樊永毅
受保护的技术使用者:重庆万马汽车制造(集团)有限公司
技术研发日:2021.05.12
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。