1.本实用新型具体涉及炒菜机器人技术领域,具体是一种可自净智能炒菜机器人。
背景技术:
2.在重油烟的环境中烹饪,可能会导致皮肤提前衰老等疾病,严重者会引发呼吸道疾病及癌症,随着生活节奏的加快和厨房革命的兴起,使得自动化烹饪装置逐渐成为厨房烹饪的主角,以实现厨房生活省时、省力、省空间。
技术实现要素:
3.为此,本实用新型提出一种可自净智能炒菜机器人以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供以下技术方案:一种可自净智能炒菜机器人,其包括搅拌机械手、夹持机械手、底盘、锅体支撑机械手、蓄电池、支撑台、锅体以及液体喷射机构,其中,所述锅体安装于所述锅体支撑机械手上,所述底盘中部的顶端面上固定安装有所述锅体支撑机械手,位于所述锅体支撑机械手的前方设置有固定安装在所述底盘上的夹持机械手,位于所述锅体支撑机械手的后方设置有固定安装在所述底盘上的支撑台,所述支撑台的台面上从左往右依次固定安装有所述液体喷射机构、搅拌机械手以及多个固体调料桶;
5.所述底盘顶端面上还固定安装有basra控制板,且所述basra控制板设置于所述夹持机械手的正左方,所述basra控制板的顶端面上固定设置有bigfish扩展板,位于所述basra控制板与所述夹持机械手之间设置有固定安装在所述底盘上的oled显示屏,所述oled显示屏的后侧安装有温度传感器。
6.进一步,作为优选,所述搅拌机械手包括搅拌机械臂、搅拌电机以及搅拌机械爪,所述搅拌机械臂的安装端固定在所述支撑台的台面上,所述搅拌机械臂的执行端固定安装有所述搅拌电机,所述搅拌电机的驱动端驱动连接有所述搅拌机械爪。
7.进一步,作为优选,所述夹持机械手包括夹持机械臂和夹持机械爪,所述夹持机械臂的安装端固定安装在所述底盘的顶端面上,所述夹持机械臂的执行端固定安装有所述夹持机械爪。
8.进一步,作为优选,所述锅体支撑机械手包括支撑机械臂和支撑电机,所述支撑机械臂的安装端固定安装在所述底盘的顶端面上,所述支撑机械臂的执行端固定安装有所述支撑电机,所述支撑电机的驱动端固定连接在所述锅体的底端面上。
9.进一步,作为优选,所述液体喷射机构包括液体存储箱和水管固定组件,所述液体存储箱内间隔设置有多个容液腔,每个所述容液腔的底部均安装有微型泵,每个所述微型泵的输液端均固定连通有软管的一端,每个所述软管的另一端均固定插入所述水管固定组件的对应孔中。
10.进一步,作为优选,所述底盘的顶端面上还固定安装有清洁布固定器。
11.进一步,作为优选,所述底盘底端面的四个端角处均固定安装有支撑脚。
12.本实用新型采用以上技术,与现有的技术相比具有以下有益效果:
13.1.本实用新型装置不同于传统的炒菜机器人,在机器人的执行工序中增加了炒菜后自清洗这一步骤,烹饪结束后,连接微型泵的水管向已归位的锅体内注入水和清洁剂的混合液,搅拌机械手落下置于锅体内,通过搅拌机械手头部高速旋转来将锅内以及搅拌机械手上的油污带下,实现自清洁。
14.2.本实用新型装置中,搅拌机械手的头部在锅体内实现高速旋转带出油污后,再进行二次清洁,将锅体倒置使锅体内侧边缘紧贴锅体下方的清洁布,锅体开始自转使得抹布擦干锅内剩余水分,从而完成自清洁。
15.3.温度传感器能够实时监测锅体附近温度,并向控制系统实时反馈,若监测值超出设定温度范围,则系统提示用户并自动切断电源,以保障用户安全。
附图说明
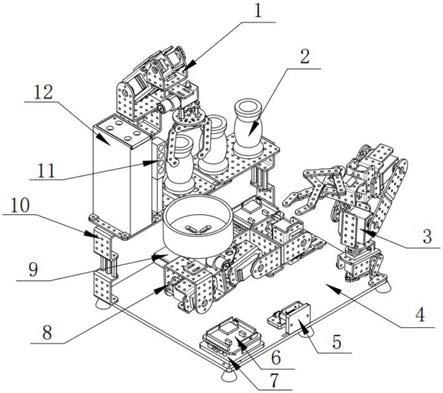
16.图1为一种可自净智能炒菜机器人的立体结构示意图;
17.图2为一种可自净智能炒菜机器人的俯视结构示意图;
18.图3为一种可自净智能炒菜机器人的左视结构示意图;
19.图4为一种可自净智能炒菜机器人的正视结构示意图;
20.图中:1、搅拌机械手;101、搅拌机械臂;102、搅拌电机;103、搅拌机械爪;2、固体调料桶;3、夹持机械手;301、夹持机械臂;302、夹持机械爪;4、底盘;5、oled显示屏;6、bigfish扩展板;7、basra控制板;8、锅体支撑机械手;801、支撑机械臂;802、支撑电机;9、蓄电池;10、支撑台;11、水管固定组件;12、液体存储箱;13、温度传感器;14、锅体;15、支撑脚;16、清洁布固定器。
具体实施方式
21.结合本实用新型实施例中的附图,下面将对本实用新型实施例的技术方案进行清楚、完整的描述。
22.实施例:请参阅附图1
‑
4,本实用新型提供一种技术方案:一种可自净智能炒菜机器人,其包括搅拌机械手1、夹持机械手3、底盘4、锅体支撑机械手8、蓄电池9、支撑台10、锅体14以及液体喷射机构,其中,锅体14安装于锅体支撑机械手8上,底盘4中部的顶端面上固定安装有锅体支撑机械手8,位于锅体支撑机械手8的前方设置有固定安装在底盘4上的夹持机械手3,位于锅体支撑机械手8的后方设置有固定安装在底盘4上的支撑台10,支撑台10的台面上从左往右依次固定安装有液体喷射机构、搅拌机械手1以及多个固体调料桶2;
23.底盘4顶端面上还固定安装有basra控制板7,且basra控制板7设置于夹持机械手3的正左方,basra控制板7的顶端面上固定设置有bigfish扩展板6,位于basra控制板7与夹持机械手3之间设置有固定安装在底盘4上的oled显示屏5,oled显示屏5的后侧安装有温度传感器13。
24.本实施例中,搅拌机械手1包括搅拌机械臂101、搅拌电机102以及搅拌机械爪103,搅拌机械臂101的安装端固定在支撑台10的台面上,搅拌机械臂101的执行端固定安装有搅拌电机102,搅拌电机102的驱动端驱动连接有搅拌机械爪103;具体的,搅拌机械臂101由2
个6
‑
42a舵机进行驱动,搅拌机械爪103由搅拌电机102进行驱动,通过搅拌机械臂101与搅拌机械爪103的相互配合,实现高速转动、翻炒、搅拌等动作,防止食材在烹饪过程中因受热不均匀而未完全炒熟。
25.本实施例中,夹持机械手3包括夹持机械臂301和夹持机械爪302,夹持机械臂301的安装端固定安装在底盘4的顶端面上,夹持机械臂301的执行端固定安装有夹持机械爪302;具体的,夹持机械臂301由2个270
°
伺服舵机和2个6
‑
42a舵机进行驱动,夹持机械爪302由1个6
‑
42a舵机进行驱动,通过夹持机械臂301的自由活动以及夹持机械爪302的灵活张合可实现物料的搬运和倾倒。
26.本实施例中,锅体支撑机械手8包括支撑机械臂801和支撑电机802,支撑机械臂801的安装端固定安装在底盘4的顶端面上,支撑机械臂801的执行端固定安装有支撑电机802,支撑电机802的驱动端固定连接在锅体14的底端面上;具体的,支撑机械臂801由3个270
°
伺服舵机进行驱动,通过舵机的自由活动及支撑电机802的驱动完成锅体14倾斜、倒置的动作,实现倒菜、清洁等功能。
27.本实施例中,液体喷射机构包括液体存储箱12和水管固定组件11,液体存储箱12内间隔设置有多个容液腔,每个容液腔的底部均安装有微型泵,每个微型泵的输液端均固定连通有软管的一端,每个软管的另一端均固定插入水管固定组件11的对应孔中。
28.本实施例中,底盘4的顶端面上还固定安装有清洁布固定器16。
29.本实施例中,底盘4底端面的四个端角处均固定安装有支撑脚15。
30.在具体实施时,在机器人的执行工序中增加了炒菜后自清洗这一步骤,烹饪结束后,连接微型泵的水管向已归位的锅体14内注入水和清洁剂的混合液,搅拌机械手1落下置于锅体内,通过搅拌机械手1的头部在锅体14内实现高速旋转带出油污后,再进行二次清洁,将锅体14倒置使锅体14内侧边缘紧贴锅体14下方的清洁布,锅体14开始自转使得抹布擦干锅内剩余水分,从而完成自清洁。
31.以上所述,以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。