技术特征:
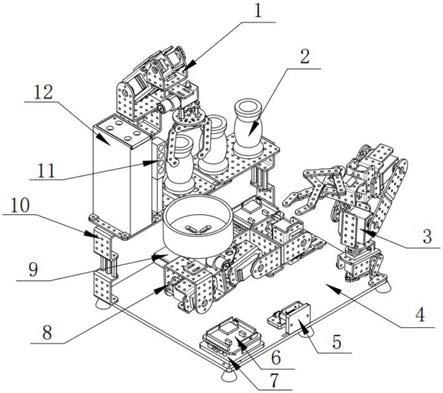
1.一种可自净智能炒菜机器人,其包括搅拌机械手(1)、夹持机械手(3)、底盘(4)、锅体支撑机械手(8)、蓄电池(9)、支撑台(10)、锅体(14)以及液体喷射机构,其中,所述锅体(14)安装于所述锅体支撑机械手(8)上,其特征在于:所述底盘(4)中部的顶端面上固定安装有所述锅体支撑机械手(8),位于所述锅体支撑机械手(8)的前方设置有固定安装在所述底盘(4)上的夹持机械手(3),位于所述锅体支撑机械手(8)的后方设置有固定安装在所述底盘(4)上的支撑台(10),所述支撑台(10)的台面上从左往右依次固定安装有所述液体喷射机构、搅拌机械手(1)以及多个固体调料桶(2);所述底盘(4)顶端面上还固定安装有basra控制板(7),且所述basra控制板(7)设置于所述夹持机械手(3)的正左方,所述basra控制板(7)的顶端面上固定设置有bigfish扩展板(6),位于所述basra控制板(7)与所述夹持机械手(3)之间设置有固定安装在所述底盘(4)上的oled显示屏(5),所述oled显示屏(5)的后侧安装有温度传感器(13)。2.根据权利要求1所述的一种可自净智能炒菜机器人,其特征在于:所述搅拌机械手(1)包括搅拌机械臂(101)、搅拌电机(102)以及搅拌机械爪(103),所述搅拌机械臂(101)的安装端固定在所述支撑台(10)的台面上,所述搅拌机械臂(101)的执行端固定安装有所述搅拌电机(102),所述搅拌电机(102)的驱动端驱动连接有所述搅拌机械爪(103)。3.根据权利要求2所述的一种可自净智能炒菜机器人,其特征在于:所述夹持机械手(3)包括夹持机械臂(301)和夹持机械爪(302),所述夹持机械臂(301)的安装端固定安装在所述底盘(4)的顶端面上,所述夹持机械臂(301)的执行端固定安装有所述夹持机械爪(302)。4.根据权利要求3所述的一种可自净智能炒菜机器人,其特征在于:所述锅体支撑机械手(8)包括支撑机械臂(801)和支撑电机(802),所述支撑机械臂(801)的安装端固定安装在所述底盘(4)的顶端面上,所述支撑机械臂(801)的执行端固定安装有所述支撑电机(802),所述支撑电机(802)的驱动端固定连接在所述锅体(14)的底端面上。5.根据权利要求4所述的一种可自净智能炒菜机器人,其特征在于:所述液体喷射机构包括液体存储箱(12)和水管固定组件(11),所述液体存储箱(12)内间隔设置有多个容液腔,每个所述容液腔的底部均安装有微型泵,每个所述微型泵的输液端均固定连通有软管的一端,每个所述软管的另一端均固定插入所述水管固定组件(11)的对应孔中。6.根据权利要求1所述的一种可自净智能炒菜机器人,其特征在于:所述底盘(4)的顶端面上还固定安装有清洁布固定器(16)。7.根据权利要求1所述的一种可自净智能炒菜机器人,其特征在于:所述底盘(4)底端面的四个端角处均固定安装有支撑脚(15)。
技术总结
本实用新型公开了一种可自净智能炒菜机器人,其包括搅拌机械手、夹持机械手、底盘、锅体支撑机械手、蓄电池、支撑台、锅体以及液体喷射机构,其中,所述锅体安装于所述锅体支撑机械手上,所述底盘中部的顶端面上固定安装有所述锅体支撑机械手,位于所述锅体支撑机械手的前方设置有固定安装在所述底盘上的夹持机械手。本实用新型装置不同于传统的炒菜机器人,在机器人的执行工序中增加了炒菜后自清洗这一步骤,烹饪结束后,连接微型泵的水管向已归位的锅体内注入水和清洁剂的混合液,搅拌机械手落下置于锅体内,通过搅拌机械手头部高速旋转来将锅内以及搅拌机械手上的油污带下,实现自清洁。自清洁。自清洁。
技术研发人员:吴创哲 曾庆辉 王智贞 丁洁瑾 王云 刘娟
受保护的技术使用者:浙江同济科技职业学院
技术研发日:2021.08.13
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。