1.本实用新型涉及电路板加工领域,具体涉及一种电路板胶水高度检测机。
背景技术:
2.smt是表面组装技术(表面贴装技术),英文全称为surface mount technology,是目前电子组装行业里最流行的一种技术和工艺。它是一种将无引脚或短引线表面组装元器件(简称smc/smd,中文称片状元器件)安装在印制电路板(printed circuit board,pcb)的表面或其它基板的表面上,通过回流焊或浸焊等方法加以焊接组装的电路装连技术。
3.电路板在经过smt过程后,还需要对电路板表面进行打胶,以提高电路板在储运过程中对恶劣环境的抵抗力,提高设备的抗冲击性能和振动力学性能,达到防潮、防霉、防盐喷雾腐蚀的目的。并且在电路板出厂前,还需要对电路板的打胶质量进行检测。打胶过后或者过薄、胶水高度、胶水体积都需要在出厂前进行检测。
4.常规的检测过程是先对电路板表面进行检测,然后在对电路板表面的平面度、胶水在焊接点的坡度和高度,都要经过人工一次次检测,需要的人力较多,检测质量也无法统一,导致出厂的电路板质量参差不齐。
5.也有部分申请人实用新型了一些检测设备,但是检测有由于焊接点存在一定的坡度,导致焊接点反射的光很少进入检测相机内,导致在焊接点检测结果不准确。
技术实现要素:
6.为解决现有技术存在的不足,本实用新型提供了一种电路板胶水高度检测机,该检测机实现了对电路板表面胶水高度和体积的自动化检测,无论是电路板表面还是焊接点的位置,都可以实现对胶水厚度和体积的检测速率快,大大提高了检测效率高。
7.本实用新型的技术方案为:
8.本实用新型提供了一种电路板胶水高度检测机,包括机架,所述机架上设有一三轴伺服模组、一载具顶升模组、宽度调节流水线、从动翻转模组、主动翻转模组和相机检测模组,所述机架上表面中间位置所述宽度调节流水线,所述宽度调节流水线中间设有所述载具顶升模组,所述宽度调节流水线两侧同轴心设有所述从动翻转模组和所述主动翻转模组,所述机架的上表面设有所述三轴伺服模组,所述三轴伺服模组上设有所述相机检测模组,所述相机检测模组包括第一检测相机、第二检测相机、反光镜、光源和镭射相机,所述第一检测相机垂直于所述机架上表面设置,所述第二检测相机与所述第一检测相机呈一定角度,所述光源位于所述第二检测相机的两侧,所述反光镜的反射面垂直于所述机架上表面,所述镭射相机位于所述第二检测相机的一侧。
9.优选地,所述宽度调节流水线包括传输导轨、宽度调节手轮、宽度调节导轨、宽度调节滑台、传输电机、传输轮、传输皮带和传输传感器,所述传输导轨一侧固定在所述机架上表面,另一侧固定在所述宽度调节滑台上,所述宽度调节滑台固定在所述宽度调节导轨上,所述宽度调节导轨固定在所述机架上表面,所述传输电机位于所述传输导轨的外侧,且
穿过所述传输导轨与所述传输轮连接,所述传输轮外侧设有所述传输皮带,所述传输导轨的末端设有所述传输传感器,所述宽度调节手轮与所述传输轨道连接。
10.优选地,所述主动翻转模组包括主动顶升电机、主动顶升导轨、主动气缸、主动夹持气缸、主动夹持块、主动旋转气缸、翻转板、主动导轨和主动平台,所述主动平台位于所述机架上,所述主动气缸位于所述主动平台的一侧,所述主动平台上设有所述主动导轨,所述主动导轨上设有所述翻转板,所述翻转板与所述主动气缸的活动端连接,所述翻转板上侧设有所述主动旋转气缸,所述主动旋转气缸末端设有所述主动夹持气缸,所述主动夹持气缸末端设有所述主动夹持块,所述主动顶升电机位于所述主动顶升导轨的一端,所述主动顶升导轨的另一端设有所述主动平台。
11.优选地,所述从动翻转模组包括从动顶升运动气缸、从动顶升导柱、从动气缸、从动夹持气缸、从动夹持块、从动导轨和从动平台,所述从动导轨下端固定在所述机架上,所述从动导轨上端设有所述从动平台,所述从动平台上设有所述从动气缸,所述从动气缸的活动端设有所述从动夹持气缸,所述从动夹持气缸与所述从动夹持块连接,所述从动顶升运动气缸位于所述从动顶升导柱的一端,所述从动顶升导柱的另一端设有所述从动平台。
12.优选地,所述载具顶升模组包括顶升气缸、顶升导轨、顶升导柱、顶升导孔、顶升铰链、顶升平台、顶升旋转电机、载具平台和载具,所述顶升气缸位于所述顶升导轨的一端,所述顶升导轨的另一端设有所述顶升平台,所述顶升平台下设有顶升导柱,所述顶升导柱外设有所述顶升导孔,所述顶升导孔固定在所述机架表面,所述顶升气缸通过定带动所述顶升铰链进而带动所述顶升平台运动,所述顶升旋转电机位于所述顶升平台和所述载具平台之间,所述载具位于所述载具平台上方。
13.优选地,所述三轴伺服模组包括x轴电机、x轴铰链、x轴导轨、x轴滑台、y轴电机、y轴铰链、y轴导轨、y轴滑台、z轴电机、z轴铰链、z轴导轨和z轴滑台,所述x轴电机位于所述x轴导轨的一端,所述x轴铰链位于所述x轴导轨的上端,所述x轴滑台位于所述x轴导轨上且与所述x轴铰链连接,所述y轴电机位于所述y轴导轨的一端,所述y轴铰链位于所述y轴导轨的上端,所述y轴滑台位于所述y轴导轨上且与所述y轴铰链连接,所述z轴电机位于所述z轴导轨的一端,所述z轴铰链位于所述z轴导轨的上端,所述z轴滑台位于所述z轴导轨上且与所述z轴铰链连接。
14.该设备工作时,首先在根据电路板的尺寸,手动调节所述宽度调节手轮,以使所述传输导轨的尺寸能够匹配电路板的尺寸,然后所述传输电机带动所述传输皮带转动,进而将电路板带动至指定位置,传输传感器检测到电路板到位后,传输电机停止工作,所述三轴伺服模组将所述相机检测模组带到电路板的上方,光源发光,第一检测相机检测电路板的平面度,焊接点的反射光经过所述反光镜进入第二检测相机内,实现了对焊接点表面胶水厚度和焊接点坡度的检测,之后所述镭射相机对电路板进行扫描,检测出焊接点的体积和高度。然后载具顶升模组、从动翻转模组和主动翻转模组工作,载具在顶升气缸的带动下,沿所述顶升导轨向上运动,并脱离所述宽度调节流水线,同时所述从动顶升运动气缸和主动顶升电机分别带动对应的从动平台和主动平台向上运动,从动气缸和主动气缸伸出,将从动夹持气缸和主动夹持气缸推定夹持电路板的位置,从动夹持气缸和主动夹持气缸收缩,从动夹持块和主动夹持块分别夹持电路板的两端,主动旋转气缸旋转180度,完成对电路板的翻转,之后,载具顶升模组工作,将所述载具顶升,接触到电路板,从动夹持气缸和主
动夹持气缸伸出,松开电路板,并且从动气缸和主动气缸收回,载具在顶升气缸的带动下,沿所述顶升导轨向下运动,落入所述宽度调节流水线上,同时从动顶升运动气缸和主动顶升电机分别带动对应的从动平台和主动平台向下运动,电路板落入指定位置后,相机检测模组对电路板的另一面进行检测。检测结束后,宽度调节流水线将检测后的电路板传输值下一个工位,新的待检测电路板传输值检测位点。
15.本实用新型所达到的有益效果为:
16.通过设置所述第二检测相机和反光镜,使焊接点反射的光可以进入第二检测相机内,以便于对焊接点坡度进行检测;
17.通过设置所述镭射相机,完成对电路板焊接点三维扫描,实现了对焊接点高度和焊接点体积的检测;
18.通过设置所述第一检测相机实现了对电路板表面平面度进行检测。
附图说明
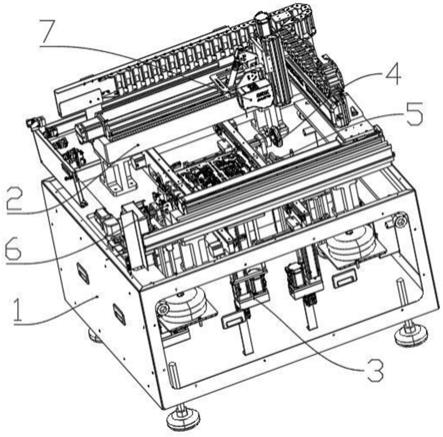
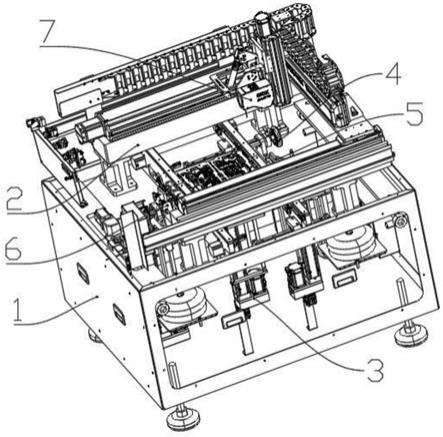
19.图1是本实用新型整体结构示意图。
20.图2是是三轴伺服模组的结构示意图。
21.图3是载具顶升模组的结构示意图。
22.图4是从宽度调节模组的结构示意图。
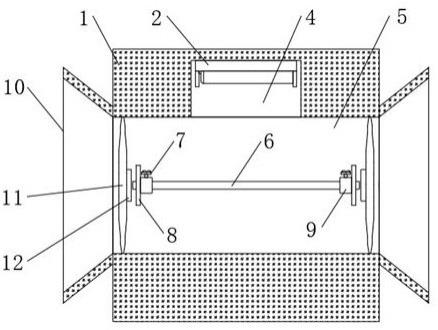
23.图5是从动翻转模组和主动翻转模组的结构示意图。
24.图6相机检测模组的结构示意图。
25.1、机架;
26.2、三轴伺服模组;201、x轴电机;202、x轴铰链;203、x轴导轨;204、x轴滑台;205、y轴电机;206、y轴铰链;207、y轴导轨;208、y轴滑台;209、z轴电机;210、z轴铰链;211、z轴导轨;212、z轴滑台;
27.3、载具顶升模组;31、顶升气缸;32、顶升导轨;33、顶升导柱;34、顶升导孔;35、顶升铰链;36、顶升平台;37、顶升旋转电机;38、载具平台;39、载具;
28.4、宽度调节流水线;41、宽度调节手轮;42、宽度调节导轨;43、宽度调节滑台;44、传输电机;45、传输轮;46、传输皮带;47、传输传感器;48、传输导轨;
29.5、从动翻转模组;51、从动气缸;52、从动夹持气缸;53、从动夹持块;54、从动导轨;55、从动平台;56、从动顶升运动气缸;57、从动顶升导柱;58、从动固定板;
30.6、主动翻转模组;61、主动气缸;62、主动夹持气缸;63、主动夹持块;64、主动旋转气缸;65、翻转板;66、主动导轨;67、主动平台;68、主动顶升电机;69、主动顶升导轨;
31.7、相机检测模组;71、第一检测相机;72、第二检测相机;73、反光镜;74、光源;75、镭射相机。
具体实施方式
32.为便于本领域的技术人员理解本实用新型,下面结合附图说明本实用新型的具体实施方式。
33.如图1~6所示,本实用新型提供了一种电路板胶水高度检测机,包括机架1,所述机架1上设有一三轴伺服模组2、一载具顶升模组3、宽度调节流水线4、从动翻转模组5、主动
翻转模组6和相机检测模组7,所述机架1上表面中间位置所述宽度调节流水线4,所述宽度调节流水线4一方面可以将电路版传输值检测工位,同时自身的宽度也可以根据电路板的宽度进行调整,扩大了整个调节流水线的适用范围,所述宽度调节流水线4中间设有所述载具顶升模组3,所述载具顶升模组3可以将待检测的电路板顶升,以便于所述从动翻转模组5和所述主动翻转模组6对电路板进行翻转,所述宽度调节流水线4两侧同轴心设有所述从动翻转模组5和所述主动翻转模组6,所述机架1的上表面设有所述三轴伺服模组2,所述三轴伺服模组2上设有所述相机检测模组7,所述三轴伺服模组2可以带动所述相机检测模组7运动,所述相机检测模组7包括第一检测相机71、第二检测相机72、反光镜73、光源74和镭射相机75,所述第一检测相机71垂直于所述机架1上表面设置,以便于检测电路板表面的平面度,所述第二检测相机72与所述第一检测相机71呈一定角度,所述第二检测相机72可以检测焊接点的坡度,所述光源74位于所述第二检测相机72的两侧,所述光源74用于照亮电路板,以便于第一检测相机71和第二检测相机72对电路板进行检测,所述反光镜73的反射面垂直于所述机架1上表面,所述反光镜73可以将焊接点的坡面反射到第二检测相机72内,所述镭射相机75位于所述第二检测相机72的一侧。
34.在本实施例中,所述宽度调节流水线4包括传输导轨48、宽度调节手轮41、宽度调节导轨42、宽度调节滑台43、传输电机44、传输轮45、传输皮带46和传输传感器47,所述传输导轨48一侧固定在所述机架1上表面,另一侧固定在所述宽度调节滑台43上,所述宽度调节滑台43固定在所述宽度调节导轨42上,所述宽度调节导轨42固定在所述机架1上表面,所述传输电机44位于所述传输导轨48的外侧,且穿过所述传输导轨48与所述传输轮45连接,所述传输轮45外侧设有所述传输皮带46,所述传输导轨48的末端设有所述传输传感器47,通过转动所述宽度调节手轮41,可以调节所述传输导轨48之间的距离,进而适应不同大小尺寸的电路板,所述宽度调节手轮41与所述传输轨道48连接。
35.在本实施例中,所述主动翻转模组6包括主动顶升电机68、主动顶升导轨69、主动气缸61、主动夹持气缸62、主动夹持块63、主动旋转气缸64、翻转板65、主动导轨66和主动平台67,所述主动平台67位于所述机架1上,所述主动气缸61位于所述主动平台67的一侧,所述主动平台67上设有所述主动导轨66,所述主动导轨66上设有所述翻转板65,所述翻转板65与所述主动气缸61的活动端连接,所述翻转板65上侧设有所述主动旋转气缸64,所述主动旋转气缸64末端设有所述主动夹持气缸62,所述主动夹持气缸62末端设有所述主动夹持块63,所述主动顶升电机68位于所述主动顶升导轨69的一端,所述主动顶升导轨69的另一端设有所述主动平台67,通过设置所述主动顶升电机68可以带动所述主动平台67沿所述主动顶升导轨69运动,所述主动平台67上设有所述主动导轨66和所述主动气缸61,所述主动导轨66上设有所述翻转板65,且所述主动气缸61和所述翻转板65连接,所述翻转板65上设有所述主动旋转气缸64,所述主动旋转气缸64的活动端设有所述主动夹持气缸62,所述主动夹持气缸62自由端设有所述主动夹持块63。
36.在本实施例中,所述从动翻转模组5包括从动顶升运动气缸56、从动顶升导柱57、从动气缸51、从动夹持气缸52、从动夹持块53、从动导轨54和从动平台55,所述从动导轨54下端固定在所述机架1上,所述从动导轨54上端设有所述从动平台55,所述从动平台55上设有所述从动气缸51,所述从动气缸51的活动端设有所述从动夹持气缸52,所述从动夹持气缸52与所述从动夹持块53连接,所述从动顶升运动气缸56位于所述从动顶升导柱57的一
端,所述从动顶升导柱57的另一端设有所述从动平台55,在所述主动顶升电机68工作时,所述从动顶升运动气缸56同步工作,带动所述从动平台55沿所述从动顶升导柱57向上运动,之后所述从动气缸51推动一从动固定板58沿所述从动导轨54运动,所述从动固定板58通过一个轴承与所述从动夹持气缸52运动,从动夹持气缸52与主动夹持气缸62同时收缩,从动夹持块53和主动夹持块63一起将电路板夹持住。
37.在本实施例中,所述载具39顶升模组包括顶升气缸31、顶升导轨32、顶升导柱33、顶升导孔34、顶升铰链35、顶升平台36、顶升旋转电机37、载具平台38和载具39,所述顶升气缸31位于所述顶升导轨32的一端,所述顶升导轨32的另一端设有所述顶升平台36,所述顶升平台36下设有顶升导柱33,所述顶升导柱33外设有所述顶升导孔34,所述顶升导孔34固定在所述机架1表面,通过设置所述顶升气缸31,可以带动所述顶升平台36沿所述顶升导轨32上下运动,通过由于设置所述顶升导柱33和所述顶升导孔34,可以保证所述顶升平台36沿所述顶升导柱33方向上下运动,所述顶升平台36上设有所述顶升旋转电机37,可以对载具平台38进行角度的微调,避免所述电路板因角度问题,影响对电路板的检测,所述载具平台38用于承载所述载具39,所述载具39用于放置电路板,以对电路板进行检测,所述顶升气缸31通过定带动所述顶升铰链35进而带动所述顶升平台36运动,所述顶升旋转电机37位于所述顶升平台36和所述载具平台38之间,所述载具39位于所述载具平台38上方。
38.在本实施例中,所述三轴伺服模组2包括x轴电机201、x轴铰链202、x轴导轨203、x轴滑台204、y轴电机205、y轴铰链206、y轴导轨207、y轴滑台208、z轴电机209、z轴铰链210、z轴导轨211和z轴滑台212,所述x轴电机201位于所述x轴导轨203的一端,所述x轴铰链202位于所述x轴导轨203的上端,所述x轴滑台204位于所述x轴导轨203上且与所述x轴铰链202连接,所述y轴电机205位于所述y轴导轨207的一端,所述y轴铰链206位于所述y轴导轨207的上端,所述y轴滑台208位于所述y轴导轨207上且与所述y轴铰链206连接,所述z轴电机209位于所述z轴导轨211的一端,所述z轴铰链210位于所述z轴导轨211的上端,所述z轴滑台212位于所述z轴导轨211上且与所述z轴铰链210连接,通过设置所阿虎三轴伺服模组2,实现了对所述相机检测模组7在xyz三个方向的位置调节。
39.该设备工作时,首先在根据电路板的尺寸,手动调节所述宽度调节手轮41,以使所述传输导轨48的尺寸能够匹配电路板的尺寸,然后所述传输电机44带动所述传输皮带46转动,进而将电路板带动至指定位置,传输传感器47检测到电路板到位后,传输电机44停止工作,所述三轴伺服模组2将所述相机检测模组7带到电路板的上方,光源74发光,第一检测相机71检测电路板的平面度,焊接点的反射光经过所述反光镜73进入第二检测相机72内,实现了对焊接点表面胶水厚度和焊接点坡度的检测,之后所述镭射相机75对电路板进行扫描,检测出焊接点的体积和高度。然后载具顶升模组3、从动翻转模组5和主动翻转模组6工作,载具39在顶升气缸31的带动下,沿所述顶升导轨32向上运动,并脱离所述宽度调节流水线4,同时所述从动顶升运动气缸56和主动顶升电机68分别带动对应的从动平台55和主动平台67向上运动,从动气缸51和主动气缸61伸出,将从动夹持气缸52和主动夹持气缸62推定夹持电路板的位置,从动夹持气缸52和主动夹持气缸62收缩,从动夹持块53和主动夹持块63分别夹持电路板的两端,主动旋转气缸64旋转180度,完成对电路板的翻转,之后,载具顶升模组3工作,将所述载具39顶升,接触到电路板,从动夹持气缸52和主动夹持气缸62伸出,松开电路板,并且从动气缸51和主动气缸61收回,载具39在顶升气缸31的带动下,沿所
述顶升导轨32向下运动,落入所述宽度调节流水线4上,同时从动顶升运动气缸56和主动顶升电机68分别带动对应的从动平台55和主动平台67向下运动,电路板落入指定位置后,相机检测模组7对电路板的另一面进行检测。检测结束后,宽度调节流水线4将检测后的电路板传输值下一个工位,新的待检测电路板传输值检测位点。
40.本实用新型所达到的有益效果为:
41.通过设置所述第二检测相机72和反光镜73,使焊接点反射的光可以进入第二检测相机72内,以便于对焊接点坡度进行检测;
42.通过设置所述镭射相机75,完成对电路板焊接点三维扫描,实现了对焊接点高度和焊接点体积的检测;
43.通过设置所述第一检测相机71实现了对电路板表面平面度进行检测。
44.以上所述的本实用新型实施方式,并不构成对本实用新型保护范围的限定。任何在本实用新型的精神和原则之内所作的修改、等同替换和改进等,均应包含在本实用新型的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。