1.本实用新型涉及排爆装置技术领域,尤其涉及一种爆炸物排除机器人。
背景技术:
2.排爆机器人是一种可代替排爆人员对爆炸物体实施侦察、转移、拆解和销毁的设备;可处置其他危险物品,或作为监视和攻击平台,在排除爆炸物品的同时,还能够对保障人员的生命财产安全。由于装置的特殊性,其主要用于野外、楼宇或室内的侦查任务;矿业等地下工作环境中救援、搬运、勘探任务;机舱、车厢内的反恐任务;化学工业环境、有毒气体或核辐射环境下的勘察、搬运任务;消防行业的救援和排险任务等等,所处环境一般较为恶劣,是从事高危行业人员的有力助手。现有的排爆机器人种类繁多,例如,申请日为2019.06.26,公开号为cn210678722u,实用新型名称为“爆炸物排除机器人”的中国专利中,也公开了一种新型的排爆机器人,但是,由于排爆机器人往往应用于环境较为恶劣的区域,其周围常常伴随着余爆和震动,余爆产生的气浪会掀翻或损坏机器人,降低机器人的工作效率,严重时可能会导致装置无法正常工作;在排除爆炸物的同时,排爆机器人因所处区域的地面不平或装置重心偏移会降低装置的稳定性,导致排爆的难度增加,甚至存在侧翻的隐患,故实用性较差。
技术实现要素:
3.本实用新型的主要目的是解决现有技术中所存在的问题,提供一种爆炸物排除机器人。
4.为解决上述技术问题,本实用新型采用的技术方案是:爆炸物排除机器人,包括机体和驱动总成,所述驱动总成连接于机体上,所述机体上设置旋转机构,所述旋转机构上连接有调节臂,所述调节臂的端部连接有机械抓手,所述机体上还设置有防护机构和支撑机构,所述防护机构用于对本装置进行防护,所述支撑机构用于对本装置进行支撑加固。
5.进一步地,所述防护机构包括第一电机、连接块、伸缩气缸、容置槽和防爆盾,所述机体上开设有安置槽,所述第一电机相配合设置于安置槽内,所述连接块连接于驱动电机的输出端,所述伸缩气缸与连接块固定相连,所述容置槽开设于机体上,且该容置槽的结构与伸缩气缸的结构相配合,所述防爆盾连接于伸缩气缸的活塞杆输出端。
6.进一步地,所述防护机构设置为多组。
7.进一步地,所述支撑机构包括支撑气缸、连接板和楔形块,所述支撑气缸设置于机体上,所述连接板与支撑气缸的活塞杆输出端相连接,所述楔形块设置为多组,多组所述楔形块均匀布设于连接板上。
8.进一步地,所述支撑气缸设置为多组,多组所述支撑气缸呈一定夹角倾斜设置于机体上。
9.进一步地,所述旋转机构包括第二电机、配合槽和旋转座,机体上开设有容置腔,所述第二电机设置于容置腔内,所述配合槽开设于机体上,且所述配合槽与容置腔相连通,
所述旋转座相配合设置于配合槽内,所述旋转座与第二电机的输出端相连接,且该旋转座与调节臂相连接。
10.进一步地,所述调节臂包括第三电机、主臂、第四电机和副臂,所述第三电机连接于旋转座上,所述主臂的一端连接于第三电机的输出端,所述第四电机连接于主臂的另一端,所述副臂的一端固定连接于第四电机的输出端,且该副臂的另一端与机械抓手相连。
11.进一步地,所述机械抓手包括固定块、第五电机、传动组件、驱动轴、第一夹爪和第二夹爪,所述固定块连接于副臂的另一端,所述固定块上开设有空腔,所述第五电机连接于空腔内的内壁上,所述传动组件的输入端连接于第五电机的输出端,所述传动组件的输出端与驱动轴的输入端相连接,所述驱动轴转动设置于固定块上,所述第一夹爪固定套设于驱动轴上,所述第二夹爪转动设置于固定块上,且所述第二夹爪的结构与第一夹爪的结构相配合。
12.进一步地,所述第一夹爪设置为第一齿轮和第一爪体,所述第一齿轮固定套设于驱动轴上,且该第一齿轮的结构与第二爪体的结构相配合,所述第一爪体与第一齿轮固定相连。
13.进一步地,所述第二爪体设置为第二齿轮和第二爪体,所述第二齿轮转动设置于固定块上,且该第二齿轮与第一齿轮相啮合,所述第二爪体与第二齿轮固定相连。
14.进一步地,所述调节臂上设置有监控相机。
15.本实用新型具有的优点和积极效果是:本实用新型稳定可靠,安全性高,当现场存在余爆隐患或环境较为恶劣时,利用防护机构,能够根据实际使用情况对装置的端部或侧面进行防护,阻挡现场中余爆所产生的气浪,防止气浪掀翻或者损坏装置,有效的对装置进行保护,提高装置的适应能力;配合使用支撑机构,能够进一步提高装置的稳固性,保证排爆作业能够稳定进行;同时,机体上还设置有旋转机构、调节臂和机械抓手,通过三者的配合使用,能够对装置周围不同方向和位置进行爆炸物拆除,灵活性较强,实用性较高,且调节臂还可以折叠,方便对装置的收纳携带,同时也便于进入狭小空间进行作业。
附图说明
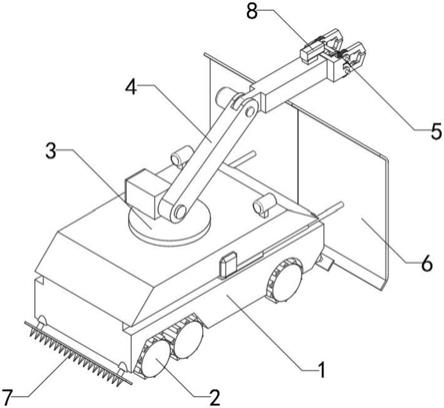
16.图1是本实用新型的立体结构示意图;
17.图2是本实用新型的侧面结构示意图;
18.图3是旋转机构的结构示意图;
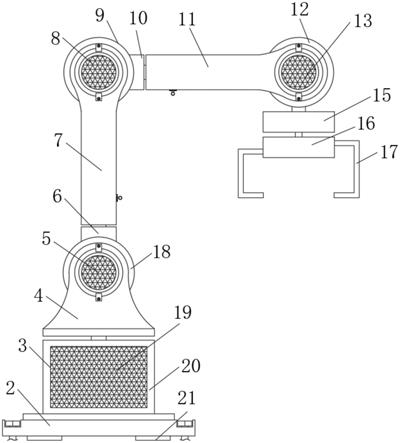
19.图4是调节臂、机械抓手和监控相机之间的连接机构示意图;
20.图5是主臂、第四电机和副臂之间的连接结构示意图;
21.图6是第一电机、第二电机、第三电机、第四电机、第五电机、监控相机、支撑气缸和伸缩气缸与控制器之间的电性控制关系框图。
22.图中:1、机体;2、驱动总成;3、旋转机构;31、第二电机;32、配合槽;33、旋转座;4、调节臂;41、第三电机;42、主臂;43、第四电机;44、副臂;5、机械抓手;51、固定块;52、第五电机;53、传动组件;54、驱动轴;55、第一夹爪;551、第一齿轮;552、第一爪体;56、第二夹爪;561、第二齿轮;562、第二爪体;6、防护机构;61、第一电机;62、连接块;63、伸缩气缸;64、容置槽;65、防爆盾;7、支撑机构;71、支撑气缸;72、连接板;73、楔形块;8、监控相机。
具体实施方式
23.为了更好的理解本实用新型,下面结合具体实施例和附图对本实用新型进行进一步的描述。
24.如图1、图2和图6所示,爆炸物排除机器人,包括机体1和驱动总成2,驱动总成2连接于机体1上,机体1上设置旋转机构3,旋转机构3上连接有调节臂4,调节臂4的端部连接有机械抓手5,机体1上还设置有防护机构6和支撑机构7,防护机构6用于对本装置进行防护,支撑机构7用于对本装置进行支撑加固,利用驱动总成2带动机体1进行运动,通过旋转机构3和调节臂4的配合使用,使得旋转机构3能够带动调节臂4进行旋转,改变调节臂4的作业方向,使其能够对装置四周进行排爆工作,同时,调节臂4可进行折叠收纳,也能够对不同高度的排爆点进行排爆作业,灵活性强;当装置进入较为危险的作业区域时,通过利用防护机构6,能够减小气浪对装置的冲击与损害,有效的对装置进行保护,且该防护机构6可进行调节,能够根据实际使用情况对装置的正面或侧面进行保护,配合使用支撑机构7,能够对本装置进行支撑加固,增加装置作业时的稳定性,防止装置出现侧翻现象。
25.如图1和图2所示,防护机构6包括第一电机61、连接块62、伸缩气缸63、容置槽64和防爆盾65,机体1上开设有安置槽,第一电机61相配合设置于安置槽内,连接块62连接于驱动电机的输出端,伸缩气缸63与连接块62固定相连,容置槽64开设于机体1上,且该容置槽64的结构与伸缩气缸63的结构相配合,防爆盾65连接于伸缩气缸63的活塞杆输出端,防护机构6设置为多组,当装置进入作业区域时,防护机构6中的防爆盾65对装置进行保护,控制第一电机61进行转动,带动与其输出端相连接的连接块62进行转动,使得连接块62带动伸缩气缸63进行转动,直至使伸缩气缸63运动至容置槽64内,使伸缩气缸63活塞杆输出端相连接的防爆盾65置于装置的端部,通过开设容置槽64,能够对位于其内部的伸缩气缸63进行保护和定位;当需要对装置的侧面进行保护时,通过第一电机61带动伸缩气缸63进行旋转,使与伸缩气缸63活塞杆输出端相连接的防爆盾65处于装置的侧面,此时控制伸缩气缸63的收缩,使防爆盾65靠近机体1,能够于侧面进行防护。
26.如图2所示,支撑机构7包括支撑气缸71、连接板72和楔形块73,支撑气缸71设置于机体1上,连接板72与支撑气缸71的活塞杆输出端相连接,楔形块73设置为多组,多组楔形块73均匀布设于连接板72上,支撑气缸71设置为多组,多组支撑气缸71呈一定夹角倾斜设置于机体1上,当本装置进行排爆过程中,能够利用支撑机构7进行支撑加固,控制机体1上的支撑气缸71的活塞杆伸长,带动与其输出端连接的连接板72进行运动,直至使设置于连接板72上的楔形块73插入地面中,从而完成对装置的加固,提高装置的稳固性,也能避免周围环境中的气浪掀翻装置。
27.如图3、图4和图5所示,旋转机构3包括第二电机31、配合槽32和旋转座33,机体1上开设有容置腔,第二电机31设置于容置腔内,配合槽32开设于机体1上,且配合槽32与容置腔相连通,旋转座33相配合设置于配合槽32内,旋转座33与第二电机31的输出端相连接,且该旋转座33与调节臂4相连接,调节臂4包括第三电机41、主臂42、第四电机43和副臂44,第三电机41连接于旋转座33上,主臂42的一端连接于第三电机41的输出端,第四电机43连接于主臂42的另一端,副臂44的一端固定连接于第四电机43的输出端,且该副臂44的另一端与机械抓手5相连,在排爆过程中,第二电机31进行转动,带动与其输出端相连接的旋转座33于配合槽32内进行旋转,带动调节臂4进行转动,改变其作业方向;同时,利用调节臂4中
的第三电机41,带动与其输出端相连接的主臂42进行摆动,利用第四电机43带动副臂44进行摆动,从而调节调节臂4的排爆位置和排爆高度,提高装置的灵活性,且在进入作业现场或不使用时,能够通过第三电机41和第四电机43控制主臂42和副臂44相互靠近,此时装置占位空间小,便于进入狭小的区域或进行收纳。
28.如图4所示,机械抓手5包括固定块51、第五电机52、传动组件53、驱动轴54、第一夹爪55和第二夹爪56,固定块51连接于副臂44的另一端,固定块51上开设有空腔,第五电机52连接于空腔内的内壁上,传动组件53的输入端连接于第五电机52的输出端,传动组件53的输出端与驱动轴54的输入端相连接,驱动轴54转动设置于固定块51上,第一夹爪55固定套设于驱动轴54上,第二夹爪56转动设置于固定块51上,且第二夹爪56的结构与第一夹爪55的结构相配合,第一夹爪55设置为第一齿轮551和第一爪体552,第一齿轮551固定套设于驱动轴54上,且该第一齿轮551的结构与第二爪体562的结构相配合,第一爪体552与第一齿轮551固定相连,第二爪体562设置为第二齿轮561和第二爪体562,第二齿轮561转动设置于固定块51上,且该第二齿轮561与第一齿轮551相啮合,第二爪体562与第二齿轮561固定相连,在排爆过程中,机械抓手5靠近爆炸物,控制第五电机52进行正转,通过与其输出端相连接的传动组件53带动驱动轴54进行转动,使得驱动轴54带动固定套设于其上的第一齿轮551进行转动,由于第一齿轮551和第二齿轮561相互啮合,使得第一齿轮551带动第二齿轮561进行转动,从而使与第一齿轮551相连接的第一爪体552和与第二齿轮561相连接的第二爪体562相互远离,此时通过调节臂4带动抓手,使爆炸物位于第一爪体552和第二爪体562之间,控制第五电机52进行反转,通过传动组件53和驱动轴54带动第一夹爪55和第二夹爪56相互靠近,从而使两者夹持住爆炸物,通过调节臂4带动机械抓手5和被夹持的爆炸物远离作业区域,从而完成排爆作业。
29.如图1所示,调节臂4上设置有监控相机8,通过采用监控相机8,能够对装置的使用现场进行监控,以使外界人员能够了解现场的具体情况,便于对当前状况作出判断。
30.另外,上述中的第一电机61与安置槽内壁之间、连接块62与伸缩气缸63之间、伸缩气缸63的活塞杆输出端与防爆盾65之间、第二电机31与容置腔内壁之间、第三电机41与旋转座33之间、第四电机43与主臂42之间、固定块51与副臂44之间、第五电机52与固定块51之间、连接板72与支撑气缸71的活塞杆输出端之间可采用螺栓连接的方式进行连接;楔形块73与连接板72之间、第一齿轮551与第一爪体552之间、第二齿轮561与第二爪体562之间可采用焊接方式进行连接;第一电机61与连接块62之间、第二电机31与旋转座33之间、第三电机41与主臂42之间、第四电机43与副臂44之间可采用金属键进行连接;传动组件53可采用皮带传动;且上述的第一电机61、第二电机31、第三电机41、第四电机43、第五电机52、监控相机8、支撑气缸71、伸缩气缸63、防爆盾65和驱动总成2的具体结构和工作原理均属于本技术领域现有技术,本实用新型未对其进行改进;其中第一电机61、第二电机31、第三电机41、第四电机43、第五电机52、监控相机8、支撑气缸71和伸缩气缸63与控制器之间的电性控制关系、电性连接方式及电性连接原理均属于本技术领域现有技术,本实用新型未对其进行改进,故不再赘述。
31.本实用新型稳定可靠,安全性高,当现场存在余爆隐患或环境较为恶劣时,利用防护机构6,能够根据实际使用情况对装置的端部或侧面进行防护,阻挡现场中余爆所产生的气浪,防止气浪掀翻或者损坏装置,有效的对装置进行保护,提高装置的适应能力;配合使
用支撑机构7,能够进一步提高装置的稳固性,保证排爆作业能够稳定进行;同时,机体1上还设置有旋转机构3、调节臂4和机械抓手5,通过三者的配合使用,能够对装置周围不同方向和位置进行爆炸物拆除,灵活性较强,实用性较高,且调节臂4还可以折叠,方便对装置的收纳携带,同时也便于进入狭小空间进行作业,本实用新型的具体工作原理如下:
32.根据实际情况将防护机构6置于装置的前端或侧面,控制第一电机61进行转动,带动与其输出端相连接的连接块62进行转动,并由连接块62带动伸缩气缸63进行转动,使得伸缩气缸63带动防爆盾65置于装置的前端或侧面位置,利用防爆盾65对装置进行保护;利用驱动总成2带动机体1进行运动,能够使装置进入到作业现场当中,当装置移动到指定位置时,控制支撑气缸71的活塞杆伸长,使其带动与其输出端相连接连接板72进行运动,直至使连接板72上的楔形块73插入地面,从而对装置进行固定;
33.在排爆过程中,第二电机31进行转动,带动与其输出端相连接的旋转座33于配合槽32内进行旋转,带动调节臂4进行转动,改变其作业方向;同时,利用调节臂4中的第三电机41,带动与其输出端相连接的主臂42进行摆动,利用第四电机43带动副臂44进行摆动,从而调节装置的排爆位置和排爆高度;机械抓手5靠近爆炸物,控制第五电机52进行正转,通过与其输出端相连接的传动组件53带动驱动轴54进行转动,使得驱动轴54带动固定套设于其上的第一齿轮551进行转动,由于第一齿轮551和第二齿轮561相互啮合,使得第一齿轮551带动第二齿轮561进行转动,从而使与第一齿轮551相连接的第一爪体552和与第二齿轮561相连接的第二爪体562相互远离,此时通过调节臂4带动抓手,使爆炸物位于第一爪体552和第二爪体562之间,此时控制第五电机52进行反转,通过传动组件53和驱动轴54带动第一夹爪55和第二夹爪56相互靠近,从而使两者夹持住爆炸物,通过调节臂4带动机械抓手5和被夹持的爆炸物远离作业区域,从而完成排爆作业。
34.以上对本实用新型的实施例进行了详细说明,但内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。