1.本实用新型涉及机器人领域,特别是一种可跟踪目标人物的摔倒检测机器人。
背景技术:
2.随着科技的不断进步与发展,人们的生活水平以及医疗水平得到极大提升,人均寿命也在不断延长,随之带来的人口老龄化问题越来越严重。相关数据表明,预计到2050年,老年人(年龄超过60岁)人口数量将达到20亿之众。根据国家统计局发布的数据,2019年末中国60岁及以上的老年人达到2.54亿,占总人口比例18.1%,报告预测,中国将在2022年左右由老龄化社会进入老龄社会,届时中国65岁以上人口将占到总人口的14%。加之现在年轻人现在生活压力大,生活节奏快,会导致老年人处于无人看护的状态。
3.以上社会现状加速了养老院产业的快速发展,2019年中国各类养老服务机构和设施数量为20.4万个,各类养老床位775万张。在养老院中,老年人的人数远多于看护人员的人数,且养老院里面的老人户外活动区域面积较大,即使装了大量摄像头,目标人员距离摄像头较远的时候如遭遇突发疾病或者地面潮湿光滑而导致的摔倒,看护人员如果仅仅靠着摄像头查看老人在户外的状态,难免会有疏忽。如果摔倒的老人长时间没有被人发现,无法及时得到救治,可能会引发严重后果,甚至危及老人生命。
4.现有技术中与本发明接近的技术如下:专利cn201822065726.x公布了一种基于六轴陀螺仪的云平台居家老人摔倒检测系统,该发明需要老人在身上佩戴传感器,对于一些高龄老人,特别是记忆力衰退严重的老人,很可能会忘记佩戴设备,并且佩戴传感器会让老人有不适感;专利cn202020477445.x公布了一种摔倒检测地板,该发明需要在老人活动的区域加装传感器,不仅安装过程繁琐,也会发生重物跌落导致的误判,且在老人户外活动区域过大的情况下,这种在地面安装传感器的方法不太实用。
技术实现要素:
5.实用新型目的:本实用新型的目的是提供一种视野广、响应快的可跟踪目标人物的摔倒检测机器人。
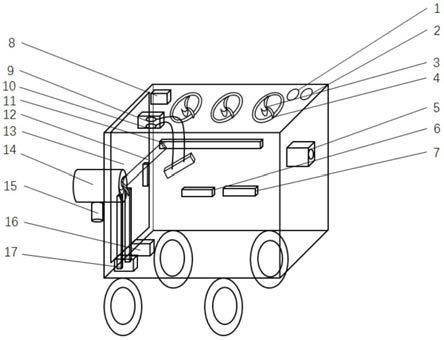
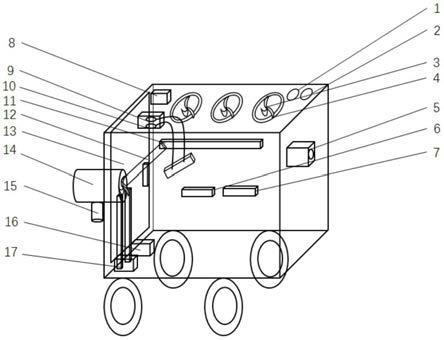
6.技术方案:本实用新型所述的可跟踪目标人物的摔倒检测机器人,包括机器人壳体和终端,所述机器人壳体上设有用于检测动作的中央处理器、与之相连的用于驱动机器人的次级处理器、电源和无线wifi收发器。
7.所述机器人壳体由钢化玻璃制成,顶面有三个圆孔。
8.所述机器人壳体上还设有第一指示灯和第二指示灯。
9.所述机器人壳体上还设有用于显示电源状态和ip地址的oled显示器。
10.所述机器人壳体顶面和左侧面圆孔中装有散热风扇,散热风扇与圆孔相接处设有防水硅胶垫,机器人壳体顶面的散热风扇上装有电动防水盖,电动防水盖通过铰链结构与继电器相连,次级处理器接收到下雨的信号时,发送指令给继电器,而电动防水盖通过铰链结构将电动防水盖关闭,避免机器人壳体顶面的散热风扇继续进水。
11.所述机器人壳体上还设有摄像头,实时拍摄老人的运动状态。
12.所述机器人壳体顶面还设有第二集水器,机器人壳体顶面的散热风扇下方设有第一集水器,第一集水器与第一排水管道、第二排水管道依次连接,第二排水管道下方设有漏斗,次级处理器接收到下雨的信号时,发送指令给继电器,电动防水盖关闭,此过程中通过顶面的散热风扇进入机器人壳体的雨水落入顶面的散热风扇正下方的第一集水器,然后通过第一排水管道流入第二排水管道,最后通过第二排水管道底部的漏斗流出机器人壳体。
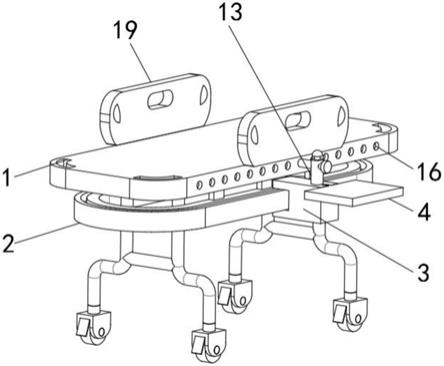
13.所述第二集水器中自上而下间隔放置第一金属垫片和第二金属垫片,当第一金属垫片和第二金属垫片之间的空隙被雨水浸没时,垫片的阻值发生变化,次级处理器接收到下雨的信号。
14.所述终端上设有用于显示电源状态的第一显示器、用于显示ip地址的第二显示器、用于显示终端视频的第三显示器。
15.所述终端上还设有第三指示灯、第四指示灯和蜂鸣器。
16.有益效果:与现有技术相比,本实用新型具有如下优点:1、可随时随地跟踪目标人物进行监控,灵敏便捷;2、适用于各种室内外场景,无视野盲区,不受雨天影响;3、检测到老人摔倒后响应及时,措施完善。
附图说明
17.图1为本实用新型的工作流程图;
18.图2为本实用新型的结构示意图;
19.图3为机器人的主视图;
20.图4为机器人的俯视图;
21.图5为机器人的左视图;
22.图6为终端显示界面图。
具体实施方式
23.下面结合附图对本实用新型的技术方案作进一步说明。
24.如图2
‑
5所示,本实用新型所述的可跟踪目标人物的摔倒检测机器人,包括机器人壳体和终端27,所述机器人壳体上设有中央处理器6、与之相连的次级处理器7、电源16和无线wifi收发器17;机器人壳体由钢化玻璃制成,优选为长30cm、宽15cm、高18cm的长方体,顶面有三个直径5cm的圆孔,左侧面有一个直径5cm的圆孔;中央处理器6优选为nvidia tx2,用来作为摔倒动作检测的机载处理器;次级处理器7优选为stm32f103,用来驱动机器人;800万像素的摄像头5用于采集图像视频信息;同时配备有无线wifi收发器17,可实现中央处理器6与终端27之间的通信,在目标老人发生摔倒事件后,及时将摔倒信息通过无线wifi收发器17传到终端27,终端27的第三指示灯24、第四指示灯26和蜂鸣器25及时响应,提醒看护人员有老人发生摔倒事件;oled显示器8可以显示电量百分比和当前wifi网络ip地址,电量百分比方便相关人员知晓机器人电量,相关人员通过oled显示器8显示的ip地址将终端27和机器人壳体连接在同一局域网;电源16优选为可拆卸式电池,oled显示器8可以显示电池电量,并通过无线wifi收发器17将电量信息实时发送至终端27,终端27设定20%作为阈值,当电量低于阈值时,终端27的蜂鸣器25发出报警声,提醒看护人员及时更换电池;关于
机器人的防水功能,设于机器人壳体底部的轮胎的直径为30cm,底盘离地面15cm,考虑到下雨天养老院经常会让老人们在室内活动,防水功能只针对机器人在户外对目标老人进行跟踪的时候突然开始下雨,机器人壳体顶面和左侧面的圆孔中装有散热风扇3,散热风扇3与圆孔相接处设有防水硅胶垫4,机器人壳体顶面的散热风扇3上装有电动防水盖21;第二集水器18中自上而下间隔放置第一金属垫片9和第二金属垫片10,当第一金属垫片9和第二金属垫片10之间的空隙被雨水浸没时,垫片的阻值发生变化,次级处理器7接收到下雨的信号;次级处理器7接收到下雨的信号后发送指令给机器人壳体顶部的三个继电器20,而电动防水盖21通过铰链结构19将电动防水盖21关闭,避免机器人壳体顶面的散热风扇3继续进水,此过程中通过顶面的散热风扇3进入机器人壳体的雨水落入顶面的散热风扇3正下方的第一集水器11,然后通过第一排水管道12流入第二排水管道14,最后通过第二排水管道14底部的漏斗15流出机器人壳体。
25.如图1所示,当摄像头5对目标老人进行追踪的时候,yolov3算法首先对目标人物进行识别,得到目标人物在机器人视野中的当前位置,当目标人物移动时,计算目标人物中心点发生的变化,以判断目标人物的移动方向,得到目标人物的移动方向后,发送指令给中央处理器6,调整转向角和进退方向,从而对目标人物实施识别跟踪,同时用yolov3对老人进行摔倒检测,目标老人发生摔倒事件后,中央处理器6及时将摔倒信息通过无线wifi收发器17传到终端27,并通过终端视频显示器28监控老人情况。考虑到不同年龄段的人摔倒后的情况不同,对老人进行年龄段分类,将55周岁到70周岁分为第一类,这一年龄段的老人一般身体状态较好,所以当机器人检测这一年龄段的老人摔倒后,启动三级警报,待10秒后老人还没有站起来,升为一级警报;将70周岁到80周岁分为第二类,这一年龄段的老人身体状况有所下滑,当机器人检测到这一年龄段的老人摔倒后,启动二级警报,待10秒钟后老人还没有站起来,升为一级警报;将80周岁以上老人分为第三类,这一年龄段的老人一般身体状况严重下滑,所以当机器人检测到这一年龄段的老人摔倒后,直接启动一级警报。三级警报后,设于终端27的第三指示灯24亮起,设于终端27的蜂鸣器25发出警报声,同时次级处理器7通知相关人员去查看老人情况;二级警报后,设于终端27的第四指示灯26亮起,设于终端27的蜂鸣器25发出警报声,次级处理器7通知医护人员去查看老人情况;一级警报后,设于终端27的第四指示灯26和设于机器人壳体的第二指示灯2同时亮起,设于终端27的蜂鸣器25发出警报声,次级处理器7通知医护人员带上担架去对摔倒老人进行救治。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。