1.磁悬浮轴承控制系统领域,特别是将新型间隙传感器应用于磁悬浮轴承控制系统。
背景技术:
2.集机械、材料、电气、软件多个领域于一体的磁悬浮轴承正在凭借其无接触,无磨损,无需润滑等优点,在高速旋转机械领域得到日益广泛的应用。磁悬浮轴承利用磁场力使轴承转子无接触地受控悬浮。
3.主动式磁悬浮轴承,即作用于转子的电磁场是受控的,可由控制通过电磁铁中的电流或其他手段使磁场发生变化,进而控制转子的悬浮。
4.磁轴承性能中很重要的一部分取决于间隙传感器的特性。为测量一个高速旋转转子的间隙,必须选用非接触式间隙传感器。依据不同传感器的特性,在不同的磁轴承应用场合应当综合考虑线性度、灵敏度、分辨率、动态范围等因素,选取合适的间隙传感器。
5.间隙传感器包括电涡流式、电感式、电容式及光学间隙传感器等,依据不同的测量原理均可以对转子的间隙进行检测,最常用的是电感式和电涡流式传感器。
技术实现要素:
6.针对上述内容,本实用新型将新型间隙传感器应用于磁悬浮轴承控制系统,具体技术方案如下:
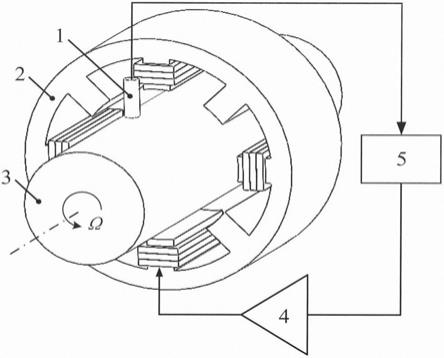
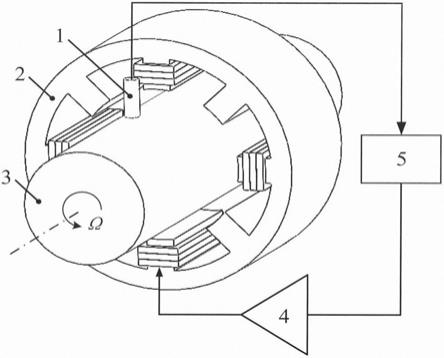
7.一种基于新型间隙传感器的磁悬浮轴承控制系统,它的组成:新型间隙传感器(1),电磁铁(2),转子(3),功率放大器(4),控制器(5)。新型间隙传感器(1)检测到转子(3)相当于参考位置的偏移,由控制器(5)发出一个控制信号,通过功率放大器(4)转变为控制电流,控制电流在电磁铁(2)中形成相应的电磁场,使得转子(3)始终保持着在设定位置上;此外,新型间隙传感器(1)的探头是在现有传感器探头的基础上增加了一个的补偿线圈。
8.所述新型间隙传感器(1)的探头结构包括传感器线圈、补偿线圈和两线圈之间的非电磁材料。传感器线圈和补偿线圈的结构形式完全一样,所述补偿线圈位于检测轨道侧,而传感器线圈位于靠近检测轨道侧;且两种线圈之间的距离大于传感器线圈的有效测量范围;传感器线圈和补偿线圈均采用无穷大结构。
9.所述新型间隙传感器(1)的测量电路采用电桥,参考两桥臂选用温度特性稳定,精度高的电阻,另外两桥臂由传感器线圈和补偿线圈构成,其中zs为传感器线圈的阻抗,zc为补偿线圈的阻抗。
10.本实用新型的技术效果:补偿线圈与轨道之间的电磁作用以及两个线圈之间的相互作用均可忽略;另外,磁悬浮列车的电磁环境复杂,为了抑制电磁干扰,传感器线圈和补偿线圈均采用无穷大结构;新型的传感器探头结构,采用电桥测量电路抑制温度影响。试验表明,新型间隙传感器在温度稳定性较现有传感器有很大提高。
附图说明
11.图1是主动式磁悬浮轴承控制系统示意图。
12.图2是新型间隙传感器探头示意图。
13.图3是传感器线圈等效电路图。
14.图4是前置放大器。
15.图5是频率补偿电路。
16.图中:1为新型间隙传感器,2为电磁铁,3为转子,4为功率放大器,5为控制器。
具体实施方式
17.下面结合附图,对本实用新型具体实施方式做进一步的说明。
18.1.整体技术方案
19.一种基于新型间隙传感器的磁悬浮轴承控制系统,它的组成包括:新型间隙传感器(1),电磁铁(2),转子(3),功率放大器(4),控制器(5),其特征在于:新型间隙传感器(1)检测到转子(3)相对于参考位置的偏移,由控制器(5)发出一个控制信号,通过功率放大器(4)转变为控制电流,控制电流在电磁铁(2)中形成相应的电磁场,使得转子(3)始终保持在设定位置上;此外,新型间隙传感器(1)的探头是在现有传感器探头的基础上增加了一个的补偿线圈。如图1、图2所示。
20.所述新型间隙传感器(1)的探头结构包括传感器线圈、补偿线圈和两线圈之间的非电磁材料。传感器线圈和补偿线圈的结构形式完全一样,如图2、图3所示。
21.所述补偿线圈位于检测轨道侧,而传感器线圈位于靠近检测轨道侧;且两种线圈之间的距离大于传感器线圈的有效测量范围;传感器线圈和补偿线圈均采用无穷大结构。
22.所述新型间隙传感器(1)的测量电路采用电桥,参考两桥臂选用温度特性稳定,精度高的电阻,另外两桥臂由传感器线圈和补偿线圈构成,其中zs为传感器线圈的阻抗,zc为补偿线圈的阻抗。
23.作为一个典型的机电一体化产品,主动式电磁轴承其各个组件的性能综合决定了整个系统的性能。图1展示了一种简单的主动式电磁轴承的结构。典型的主动式电磁轴承系统由位移传感器、控制器、执行器(由功率放大器和电磁铁组成)、转子组成。控制器接受来自位移传感器的关于转子的位移信号,与预期悬浮的位置相比,产生相应的控制信号传递到功率放大器,功率放大器驱动电磁铁产生可控的电磁力,使转子悬浮到预期的位置。
24.2.控制器
25.主动式电磁轴承的核心是控制器,高速运动转子的动态行为依赖于控制器的实时控制。控制器的输入来自各类传感器,主要为转子的运动状态信号,如位移、转速等;输出的控制信号控制后级的功率放大器,往电磁铁中注入相应的电流,使转子受控悬浮。
26.随着微处理器、数模转换器、模数转换器等集成电路的快速发展,数字控制器已经成为构建磁悬浮轴承系统的主流选择。
27.数字控制器可以非常灵活地实现多种控制算法,比如非线性控制、不平衡控制算法等。通过实现复杂的控制算法,磁轴承系统可以获得很多优异的特性,比如减小轴承振动获得高精度定位,抑制模态振动帮助挠性转子跨临界,降低振动带来的功率损耗等。
28.为了满足现代化磁悬浮轴承系统的控制需求,常选用多个处理器构建数字控制
器。不同的处理器分别完成特定的子任务。dsp是一种专用于实时数字信号处理的微处理器,其采用哈佛架构及单指令多数据流的特殊指令集,内置专门的硬件乘法器,浮点运算性能强于通用处理器,特别适合运行各类控制算法,在磁悬浮轴承系统中有着广泛的应用。但是dsp的外设扩展能力有限,不能适应多自由度磁悬浮轴承的数据输入和输出需求,因此还常常用可编程逻辑器件fpga或cpld来辅助构建控制器。fpga是一种可编程的集成电路,通过硬件描述语言verilog hdl描述逻辑电路,利用综合、布局布线、时序仿真工具完成设计与验证。
29.fpga适合于构建并行化的高速数据采集和实时控制系统,可实现多自由度位移信号采集,功率放大器控制,数据预处理,数字滤波等功能。
30.3.功率放大器
31.主动式磁轴承系统中,功率放大器接收控制器输出的控制信号,并将其转换为电磁铁线圈所需要的电流,从而建立强磁场使受控转子悬浮。
32.为了追求更高的效率和更小的体积,集成开关功率放大器功放在磁悬浮轴承系统中得到了普遍的应用。开关功放所用功率器件工作在开关状态,相比线性功放损耗大大降低,效率较高。但是开关功放的电流纹波要远高于线性功放,高电流纹波会导致转子高频振动,并产生较高涡流损耗使定、转子发热。因此降低开关功放的电流纹波是磁轴承功放设计的要点。
33.开关功放技术发展多年,所用的控制方式主要包括采样保持控制、电流滞环控制,脉冲宽度调制等。
34.采样保持控制由固定时钟驱动,在时钟的上升沿对电流信号和控制信号进行比较,并决定该周期内的管开关状态。此种控制方法实现简单,但功率管仅在每个周期起始开关,电流纹波大,失真严重。
35.电流滞环控制给定一电流滞环宽度,功率管在电流达到滞环宽度上下限时开关,保证电流在滞环宽度内波动。此种方法由于管开关时间不固定,无法避开开关噪声干扰,噪声会影响位移传感器的采样结果,进而影响磁轴承控制效果。
36.脉冲宽度调制是通过比较实际电流信号和控制信号,产生不同占空比的脉冲控制管的开关。常用的调制方式有两电平和三电平,前者线圈的电流仅有增或减两种状态,后者增加了续流状态,使得线圈中电流纹波大大降低。
37.脉冲宽度调制的三电平开关功率放大器由于其低纹波的特性得到了广泛的研究与应用。
38.4.新型间隙传感器
39.本实用新型应用了新型的传感器探头结构,采用电桥测量电路抑制温度影响。新型间隙传感器在温度稳定性较现有传感器有很大提高。新型间隙传感器探头跟现有传感器探头最大不同是在现有传感器探头的基础上增加了一个与传感器线圈完全一样的补偿线圈,其结构如图2所示。探头包括传感器线圈、补偿线圈和两线圈之间的非电磁材料。传感器线圈和补偿线圈的结构形式完全一样,只是传感器线圈位于靠近轨道侧,而补偿线圈位于远离轨道侧,而且两种线圈之间的距离大于传感器线圈的有效测量范围。这样,补偿线圈与轨道之间的电磁作用以及两个线圈之间的相互作用均可忽略。另外,磁悬浮列车的电磁环境复杂,为了抑制电磁干扰,传感器线圈和补偿线圈均采用无穷大结构。
40.测量电路采用电桥,参考两桥臂选用温度特性稳定、精度高的电阻,另外两桥臂由传感器线圈和补偿线圈构成,其中zs为传感器线圈的阻抗,zc为补偿线圈的阻抗。当测量间隙为∞时,传感器线圈和补偿线圈都与被测轨道无电磁耦合,因此,zs=zc,那么zsr=zcr,这时电桥平衡。当传感器接近轨道时,zs发生变化,电桥失衡,不考虑激励源的电阻zu并且检测电路的输入电阻无穷大。
41.当传感器靠近轨道时,由于传感器线圈中电流的作用,轨道中会形成电涡流。将轨道导体中形成的电涡流等效为一个短路环,这样一来,线圈和金属板就可以等效为互相耦合的两个线圈,如图3所示。而补偿线圈一直远离轨道,与轨道无电磁耦合,其等效电路是一个电感和电阻串联。事实上,当传感器探头远离轨道或者认为测量间隙为时,传感器线圈的等效电路也是一个电感和电阻串联,这时传感器测量电桥平衡。
42.对于感应线圈接收的宽频微弱信号往往要放大100db甚至120db,抑制零点漂移和放大器噪声就显得尤为重要。因此本新型的间隙传感器的前置放大器采用三极管对管lm194与由lm134组成的恒流源组成有源负载差分放大器,电路如图4所示。差分式放大电路就其功能来说,是放大两个输入信号之差。由于它在电路和性能方面有许多优点,因而成为集成运放的主要组成单元。
43.为得到比较平坦的频率特性曲线,补偿线圈输出的频率特性,本新型的间隙传感器采用如图5所示的补偿电路。
44.补偿电路的输入即为前置放大电路的输出,由r1r2r3r4u1a组成减法器,根据放大器的虚短和虚断的原理得:
[0045][0046]
当r4/r1=r3/r1时,则放大器的输入输出表达式为:
[0047][0048]
即输出电压与两端输出电压之差成比例关系,所以减法电路实际上就是一个差分式放大电路,把输入信号由双端变成单端并实现差分放大。
[0049]
由r5r6r7r8r9c1u
24
组成积分器,真正实现频率补偿,传递函数计算如下:
[0050]
记
[0051]
则:
[0052]
所以有:
[0053]
u
3a
组成电压跟随器,即v
o
=v
o2
。
[0054]
所以在r4/r1=r3/r1的情况下可以得到补偿电路的输入输出表达式为:
[0055][0056]
所以补偿电路的传递函数为:
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。