1.本实用新型属于康复器械领域,尤其涉及一种智能脚踝康复器。
背景技术:
2.踝关节扭伤是运动人群占比最高的损伤,不经常参加体育活动的人,一年中也有很大几率扭伤脚踝。而踝关节扭伤一般需要借助踝关节康复仪器来进行康复运动训练,现有的踝关节康复仪器仰角只有固定档位,不可连续运动,功能单一,不能满足踝关节多角度康复运动的需求;另外,现有踝关节康复仪器的固定仰角进行压迫运动,易造成二次损伤。
技术实现要素:
3.鉴于上述问题,本实用新型的目的在于提供一种智能脚踝康复器,旨在解决现有踝关节康复仪器不能满足踝关节多角度康复运动的需求,易造成二次损伤的技术问题。
4.本实用新型采用如下技术方案:
5.所述智能脚踝康复器包括下壳体、上壳体、支撑板和踏板,所述上壳体设置于下壳体顶部,所述下壳体顶部设有固定铰链,所述支撑板一端转轴连接至所述固定铰链,所述上壳体内设有用于驱动支撑板俯仰运动的顶升机构,所述支撑板顶部和踏板底部之间转轴连接。
6.进一步的,所述顶升机构包括顶升电机和导轨,所述顶升电机的输出轴固定有丝杆,所述丝杆上匹配安装有滑座,所述滑座斜向上设有两根推杆,所述推杆转轴连接至支撑板底部。
7.进一步的,所述支撑板底部设有对称分布的两个固定柱,所述推杆转轴连接至对应侧的固定柱。
8.进一步的,所述支撑板顶部和踏板底部之间通过滚动轴承连接,所述踏板底部且位于滚动轴承外周向下设有若干弹簧限位滚珠,所述支撑板顶部设有与所述弹簧限位滚珠一一对应的半球形凹槽。
9.进一步的,所述下壳体顶部为旋转板,所述上壳体、顶升机构和固定铰链均设置于旋转板上,所述旋转板底部设有一圈旋转齿,所述下壳体内固定有旋转电机,所述旋转电机的输出轴传动连接有驱动齿轮,所述驱动齿轮和旋转齿相啮合,所述旋转板底部还设有一圈环形轨道,所述下壳体内设有若干均匀分布的支撑柱,所述支撑柱顶部开设有滑珠槽,所述滑珠槽内嵌入有滑珠,且所述滑珠顶部嵌入所述环形轨道。
10.进一步的,所述踏板顶部向内凹陷形成有脚踏区,所述脚踏区一端向上设有包覆板。
11.进一步的,所述上壳体内还设有控制箱,所述上壳体顶部设有智能控制面板,所述智能控制面板、顶升电机和旋转电机均连接至所述控制箱。
12.本实用新型的有益效果是:本实用新型提供一种智能脚踝康复器,根据踝关节的自然运动模式设计,能够实现踝关节的背屈和跖屈动作,帮助患者进行踝关节的多角度康
复运动,适用范围广;支撑板与踏板分体设计,踏板可进行左旋或右旋,实现脚部方位的变化,模拟踝关节的翻转运动;支撑板的上仰运动通过顶升机构实现,顶升机构通过丝杆传动,可实现仰角的连续进给,传动平稳,避免二次损伤;踏板底部的四组弹簧限位滚珠能够保证踏板每次以90
°
/档进行旋转限位。
附图说明
13.图1是本实用新型实施例提供的智能脚踝康复器的结构图;
14.图2是本实用新型实施例提供的旋转板的侧视图;
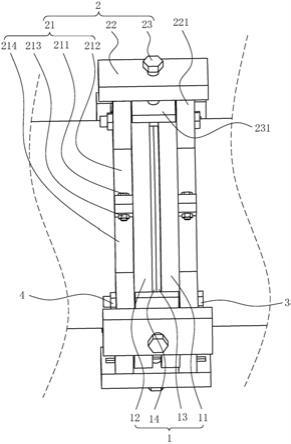
15.图3是本实用新型实施例提供的顶升机构的结构图;
16.图4是本实用新型实施例提供的踏板的爆炸图;
17.图5是本实用新型实施例提供的环形轨道的结构图;
18.图6是本实用新型实施例提供的下壳体的结构图。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
20.为了说明本实用新型所述的技术方案,下面通过具体实施例来进行说明。
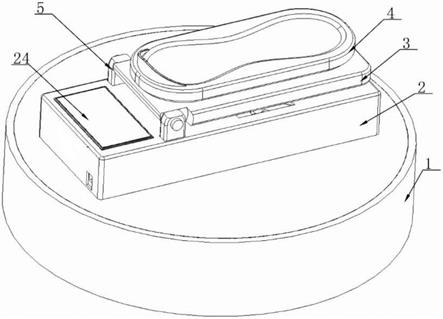
21.图1示出了本实用新型实施例提供的智能脚踝康复器的结构,为了便于说明仅示出了与本实用新型实施例相关的部分。
22.如图1所示,本实施例提供的智能脚踝康复器包括下壳体1、上壳体2、支撑板3和踏板4,所述上壳体2设置于下壳体1顶部,所述下壳体1顶部设有固定铰链5,所述支撑板3一端转轴连接至所述固定铰链5,所述上壳体2内设有用于驱动支撑板3俯仰运动的顶升机构,所述支撑板3顶部和踏板4底部之间转轴连接。
23.本装置使用时,使用者将脚部放置于踏板上,通过顶升机构实现支撑板和踏板整体的上仰运动,脚部在踏板上跟随踏板运动,实现踝关节的背屈和跖屈的康复运动;将踏板旋转90
°
之后进行上仰运动,脚部在踏板上跟随踏板运动,实现脚踝的内翻或外翻的康复运动。
24.如图2、3所示,所述顶升机构包括顶升电机6和导轨9,所述顶升电机6的输出轴固定有丝杆7,所述丝杆7上匹配安装有滑座10,所述滑座10斜向上设有两根推杆11,所述推杆11转轴连接至支撑板3底部。具体实现时,通过顶升电机驱动丝杆提供进给运动,带动滑座在导轨上移动,滑座带动推杆进行顶升运动,由于支撑板一端与固定铰链转轴连接,使得支撑板在推杆的推动下进行上仰运动,上仰角度为0
‑
60
°
。顶升机构采用丝杆传动,能够实现仰角的连续进给,速度可调,传动平稳,避免二次损伤。
25.更为具体的,所述支撑板3底部设有对称分布的两个固定柱12,所述推杆11转轴连接至对应侧的固定柱12。
26.如图4所示,所述支撑板3顶部和踏板4底部之间通过滚动轴承13连接,所述踏板4底部且位于滚动轴承13外周向下设有若干弹簧限位滚珠14,所述支撑板3顶部设有与所述弹簧限位滚珠一一对应的半球形凹槽15。其中,滚动轴承保证了踏板旋转的平稳与灵活性,
弹簧限位滚珠为四组,能够保证踏板每次以90
°
/档进行旋转限位。
27.如图5、6所示,所述下壳体1顶部为旋转板16,所述上壳体2、顶升机构和固定铰链5均设置于旋转板16上,所述旋转板16底部设有一圈旋转齿17,所述下壳体1内固定有旋转电机18,所述旋转电机18的输出轴传动连接有驱动齿轮19,所述驱动齿轮19和旋转齿17相啮合,所述旋转板16底部还设有一圈环形轨道20,所述下壳体1内设有若干均匀分布的支撑柱21,所述支撑柱21顶部开设有滑珠槽,所述滑珠槽内嵌入有滑珠22,且所述滑珠22顶部嵌入所述环形轨道20。本实施例中,旋转板可进行旋转运动,方便使用者调整角度,实现脚部方位的变化,具体实现时,旋转电机能够驱动驱动齿轮转动,驱动齿轮带动旋转齿转动,从而实现旋转板的转动,在旋转板转动过程中,滑珠同时也在旋转板底部的环形轨道内运动,增加了旋转板转动的平稳与灵活性。
28.作为一种优选结构,所述踏板4顶部向内凹陷形成有脚踏区41,所述脚踏区41一端向上设有包覆板42。脚踏区能够方便使用者脚部的放置,包覆板能够对脚后跟部起到保护作用。
29.另外,所述上壳体2内还设有控制箱23,所述上壳体2顶部设有智能控制面板24,所述智能控制面板、顶升电机和旋转电机均连接至所述控制箱。具体的,智能控制面板能够记录康复训练时间,使用者可以通过智能控制面板选择不同模式的康复运动、调节运动速度以及自主选择悬停时间。
30.综上所述,本实用新型提供一种智能脚踝康复器,根据踝关节的自然运动模式设计,能够实现踝关节的背屈和跖屈动作,帮助患者进行踝关节的多角度康复运动,适用范围广;支撑板与踏板分体设计,踏板可进行左旋或右旋,实现脚部方位的变化,模拟踝关节的翻转运动;支撑板的上仰运动通过顶升机构实现,顶升机构通过丝杆传动,可实现仰角的连续进给,传动平稳,避免二次损伤;踏板底部的四组弹簧限位滚珠能够保证踏板每次以90
°
/档进行旋转限位。
31.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。