1.本公开涉及车辆的自动驾驶,并且更具体地,涉及能够优化执行自动驾驶的车辆的燃料补充的驾驶控制。
背景技术:
2.为了增加使用车辆的用户的安全性和便利性,将各种传感器和电子设备结合到车辆中的技术正在加速发展。特别地,已经在车辆上安装了提供了为用户的驾驶便利而开发的各种功能(例如,智能巡航控制和车道保持辅助)的系统。
3.因此,已经逐步开发了所谓的自动驾驶,其中,车辆自行考虑外部环境在道路上行驶,而无需驾驶员的操纵。
4.自动驾驶车辆配备有多个传感器和计算设备,以根据对道路状况和驾驶状况的自行分析信息来控制车辆,同时允许在无需驾驶员干预的情况下行驶至目的地。
5.然而,在根据传统技术的自动驾驶技术中,存在以下问题:在加油站等补充燃料的策略不包括在用于行驶至目的地的行驶策略中。
6.描述为背景技术的内容仅用于改善对本公开的背景的理解,并且不应被视为承认它们对应于本领域普通技术人员已知的现有技术。
技术实现要素:
7.提出本公开以解决这样的问题,并且本公开提供了一种包括驱动车辆的驱动设备的能源的补充策略的自动驾驶控制技术。
8.为了实现上述目的,根据本公开的车辆的自动驾驶控制系统包括彼此通信连接的处理器、导航和行驶控制器。处理器被配置为估算驱动车辆的驱动设备的能源的补充量。导航被配置为基于目的地来设置行驶路线,并基于设置的行驶路线来搜索能源的补充站。处理器还被配置为基于估算的能源的补充量、导航设置的行驶路线以及搜索到的补充站,来确定能源的补充策略。行驶控制器被配置为基于导航设置的行驶路线和确定的补充策略来控制车辆的行驶。
9.车辆的自动驾驶控制系统还可以包括输入器,被配置为接收车辆的目的地或选择性地接收车辆的所需到达时间。当将所需到达时间输入到输入器时,处理器可以基于目的地和所需到达时间来确定补充策略。
10.处理器可以基于导航设置的行驶路线来计算车辆的预期燃料经济性,基于计算出的预期燃料经济性和估算的能源的补充量,来计算可用行驶距离或所需补充量,并且根据计算出的可用行驶距离或所需补充量确定补充策略。
11.处理器可以基于搜索到的所述补充站的成本信息来计算能源的补充成本,并且确定使计算出的补充成本最小化的最小成本策略作为补充策略。
12.处理器可以基于输入的或预先存储的车辆的支付信息或用户的支付信息来计算能源的补充成本。
13.当处理器确定最小成本策略作为补充策略时,行驶控制器可以基于导航设置的行驶路线的行驶信息将行驶路线划分为多个部分,为每个部分分配所需时间,并且根据为每个部分分配的所需时间和行驶信息,基于最佳燃料经济性来控制车辆的行驶。
14.处理器可以基于搜索到的补充站的预期补充时间,来计算根据导航设置的行驶路线的所需时间,并且确定使计算出的所需时间最小化的最小时间策略作为补充策略。
15.处理器可以基于最小时间策略中包括的补充站的成本信息来计算能源的补充成本,其中在最小时间策略中,计算出的所需时间被等同地计算,并确定使计算出的补充成本最小化的最小时间策略作为补充策略。
16.当处理器确定最小时间策略作为补充策略时,行驶控制器可以根据导航设置的行驶路线来控制车辆的行驶以使所需时间最小化。
17.处理器可以接收用户手动地从多个策略中选择的补充策略,或者基于车辆的驾驶模式自动选择补充策略。
18.为了实现上述目的,根据本公开的控制车辆的自动驾驶的方法包括以下步骤:基于车辆的目的地来设置行驶路线;基于设置的行驶路线,搜索驱动车辆的驱动设备的能源的补充站;基于能源的补充量、设置的行驶路线以及搜索到的补充站,来确定能源的补充策略;以及根据设置的行驶路线和确定的补充策略来控制车辆的行驶。
19.在设置行驶路线的步骤之前该方法还可以包括接收车辆的目的地或选择性地接收车辆的所需到达时间的步骤。在确定补充策略的步骤中,当输入所述所需到达时间时,可以基于目的地和所需到达时间确定补充策略。
20.在确定补充策略的步骤之前,该方法还可以包括基于设置的行驶路线计算车辆的预期燃料经济性的步骤;以及基于计算出的期望燃料经济性和估算的能源的补充量,计算可用行驶距离或所需补充量。在确定补充策略的步骤中,可以基于计算出的可用行驶距离或所需补充量来确定补充策略。
21.在确定补充策略的步骤中,可以基于搜索的补充站的成本信息来计算能源的补充成本,并且可以确定使计算出的补充成本最小化的最小成本策略作为补充策略。
22.在确定补充策略的步骤中,可以基于输入的或预先存储的车辆的支付信息或用户的支付信息来计算能源的补充成本。
23.在控制车辆的行驶的步骤中,当确定最小成本策略作为补充策略时,可以基于设置的行驶路线的行驶信息将行驶路线划分为多个部分,可以为每个部分分配所需时间,并且可以根据为每个部分分配的所需时间和行驶信息,基于最佳燃料经济性来控制车辆的行驶。
24.在确定补充策略的步骤中,可以基于搜索到的补充站的预期补充时间,来计算根据设置的行驶路线的所需时间,并且可以确定使计算出的所需时间最小化的最小时间策略作为补充策略。
25.在确定补充策略的步骤中,基于所述最小时间策略中包括的补充站的成本信息来计算能源的补充成本,其中在最小时间策略中,计算出的所需时间被等同地计算,并且可以确定使计算出的补充成本最小化的最小时间策略作为补充策略。
26.在控制车辆的行驶的步骤中,当确定最小时间策略作为补充策略时,可以根据设置的行驶路线来控制车辆的行驶以使所需时间最小化。
27.在确定补充策略的步骤中,用户手动输入的多个策略中的补充策略的选择,或者基于车辆的驾驶模式自动选择的补充策略。
28.在根据本公开的车辆的自动驾驶控制系统及其方法中,具有实现反映根据用户意图的补充策略的自动驾驶的效果。
29.另外,相应地,具有根据行驶路线优化能源的补充成本或优化行驶时间的效果。
附图说明
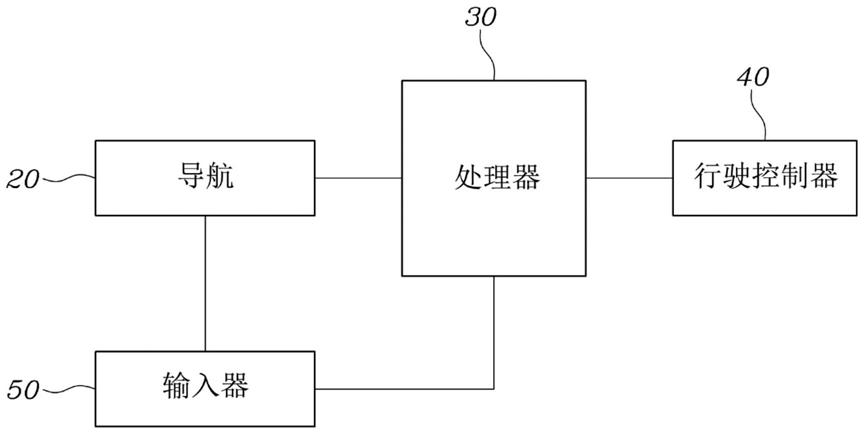
30.图1是根据本公开的实施例的车辆的自动驾驶控制系统的框图。
31.图2a
‑
图2c是示出根据本公开的实施例的导航的行驶路线设置和行驶控制器的行驶控制的图。
32.图3是根据本公开的实施例的控制车辆的自动驾驶的方法的流程图。
具体实施方式
33.仅出于描述根据本公开的实施例的目的而示例了在本说明书或申请中公开的本公开的实施例的具体结构或功能描述,可以以各种形式实现根据本公开的实施例,并且不应将其解释为限于本说明书或申请中描述的实施例。
34.由于根据本公开的实施例可以以各种方式修改并且具有各种形式,因此在附图中示出了具体的实施例,并且将在本说明书或申请中对其进行详细描述。然而,这并不旨在将根据本公开的构思的实施例限制为特定的公开形式,并且应当理解,包括在本公开的精神和范围内的所有改变、等同和替代也包括在内。
35.诸如第一和/或第二的术语可以用于描述各种组件,但是这些组件不应受到这些术语的限制。以上术语仅用于将一个组件与其他组件进行区分,例如,在不脱离根据本公开的构思的权利的范围的情况下,第一组件可以被称为第二组件,并且类似地,第二组件也可以被称为第一组件。
36.当一个组件被称为“连接”或“接触”到另一个组件时,应当理解,它可以直接连接或接触到另一个组件,但是其他组件也可以存在于中间。另一方面,当一个组件被称为“直接连接”或“直接接触”到另一个组件时,应当理解的是,中间没有其他组件。还应当解释描述组件之间的关系的其他表达,例如“在...之间”和“仅在...之间”或“与...相邻”和“与...直接相邻”。
37.本说明书中使用的术语仅用于描述具体实施方式,而无意于限制本公开。除非上下文另外明确指出,否则单数表达包括复数表达。在本说明书中,诸如“包括”或“具有”的术语旨在表示一组特征、数量、步骤、动作、组件、部件或其组合的存在,但是应当理解的是,初步不排除存在或附加一个或多个其他特征、数量、步骤、动作、组件、部件或其组合的可能性。
38.除非另有定义,否则应当理解,本文中使用的所有术语(包括技术术语和科学术语)的含义与本领域技术人员所理解的含义相同。除非在本说明书中明确定义,诸如在常用字典中定义的那些术语应被解释为具有与相关技术的含义一致的含义,并且不应被解释为理想的或过于正式的含义。
39.在下文中,将参考附图通过描述本公开的优选实施例来详细地描述本公开。在各
图中所示的相同附图标记表示相同的构件。
40.图1是根据本公开的实施例的车辆的自动驾驶控制系统的框图。
41.参照图1,根据本公开的实施例的车辆的自动驾驶控制系统包括处理器30,被配置为估算驱动车辆的驱动设备的能源的补充量;导航装置20,被配置为基于目的地来设置行驶路线,并基于设置的行驶路线来搜索能源的补充站;处理器30被配置为基于处理器30估算的能源的补充量、导航20设置的行驶路线以及搜索到的补充站,来确定能源的补充策略;以及驱动控制器40,被配置为基于导航20设置的行驶路线和处理器30确定的补充策略来控制车辆的行驶。
42.根据本公开的示例性实施例的处理器30、导航20、处理器30、驱动控制器40和输入器50可以由被配置为控制车辆的各种部件操作的算法、被配置为存储与再现算法的软件指令有关的数据的非易失性存储器(未示出),和被配置为使用存储在存储器中的数据来实现以下描述的操作的处理器(未示出)实现。在此,存储器和处理器可以被实现为单独的芯片。可替代地,存储器和处理器可以被实现为彼此集成的单个芯片。处理器可以采用一个或多个处理器的形式。
43.根据一个实施例的处理器30、导航20、处理器30、行驶控制器40和输入器50可以被包括在车辆的电子控制单元(electronic control unit,ecu)中,或者被包括在控制车辆的自动驾驶的单独的控制器中。
44.处理器30可以实时估算驱动车辆的驱动设备的能源的补充量。车辆的驱动设备可以是产生各种动力的设备,例如发动机或电动机,并且能源是驱动设备的燃料或能量源,可以是汽油、柴油、电力或氢。
45.具体地,处理器30可以估算存储在存储能源的燃料箱或电池中的能源的补充量。在一个实施例中,可以通过感测存储在燃料箱中的燃料的体积或负载、感测燃料箱内部的压力,或感测电池的补充状态(state of charge,soc)等来估算能源的补充量。
46.导航20可以基于输入到车辆的目的地来设置车辆的行驶路线。具体地,导航20可以连接到全球定位系统(global positioning system,gps)以接收车辆的当前位置,并且可以连接到通信设备以接收实时交通状况。导航20可以基于输入的实时交通状况来设置各种行驶路线,例如最短时间优先级、最短距离优先级或免费道路优先级,并且选择设置的行驶路线中的一个。
47.另外,导航20可以基于行驶路线来搜索能源的补充站。特别地,导航20可以搜索位于行驶路线上或位于行驶路线中小于预设距离的能源的补充站。
48.另外,可以基于针对每个车辆预设的能源的类型来搜索补充站。换句话说,在电动车辆(electric vehicle,ev)的情况下,可以搜索充电站;在发动机车辆的情况下,可以搜索加油站;在氢能车辆(fuel cell electric vehicle,fcev)情况下,可以搜索氢气站;在可补充混合动力车辆(rechargeable hybrid vehicle,phev)的情况下,可以分别搜索充电站和加油站。
49.处理器30可以基于在行驶路线中的能源的补充量和搜索的补充站,来确定所述能源的补充策略。在此,补充策略可以是关于在行驶路线上对补充能源多少次,或者在搜索到的补充站中的哪个补充站补充能源的控制策略。
50.行驶控制器40可以基于设置的行驶路线和确定的补充策略来控制车辆的行驶。具
体地,行驶控制器40可以通过控制车辆的各种传感器、驱动设备和转向设备来控制车辆的自动驾驶。
51.还包括输入器50,其接收车辆的目的地或选择性地接收车辆的所需到达时间。当将所需到达时间输入到输入器50时,处理器30可以基于目的地和所需到达时间来确定补充策略。
52.输入器50可以是由驾驶员或用户直接操作的操作面板或音频视频导航(audio video navigation,avn)设备,并且作为另一实施例,可以是无线连接至移动通信终端等的通信设备。
53.图2a
‑
图2c是示出根据本公开的实施例的导航20的行驶路线设置和行驶控制器40的行驶控制的图。
54.还参照图2a
‑
图2c,驾驶员或用户可以通过输入器50输入车辆的目的地,并且可以选择性地输入车辆的所需到达时间。在一个实施例中,可以根据导航20设置的多个行驶路线,通过限制多个所需到达时间之间的范围来输入所需到达时间。
55.导航20可以基于输入的目的地和可选地车辆的输入的所需到达时间来设置行驶路线。
56.在一个实施例中,导航20可以选择可以在所需到达时间内到达目的地的路线,同时在可以到达用户选择的目的地的各种路线中具有最低的燃料消耗的路线作为最低成本行驶路线。
57.如图2a所示,导航装置20可以通过反映道路的每个部分的当前交通状况来生成行驶概况。在此,道路可以根据诸如城市中的高速公路和拥挤道路之类的道路类型被划分为多个部分,或者根据当前交通状况根据道路的平均速度被划分为多个部分。
58.另外,导航20通过使用每个路线的预期平均行驶速度概况和每个车速的平均燃料经济性表的数据,来计算相应路线中的预期能源消耗,并且可以为每个搜索路线分配等级,将1分配给预期燃料消耗最小的路径,将2分配给预期燃料消耗第二小的路径。
59.在此,最高等级被指定为1,然后指定为2、3和4,并且可以根据预期燃料消耗将等级分配给搜索路线。
60.在如上所述指定搜索路线的等级之后,仅从这些路线中提取能够满足所需到达时间的路线,并且在提取的路线中选择具有最高等级的路线。
61.作为参考,图2b表示在如图2a所示的搜索路线中选择了预期燃料消耗为7l的等级2的路线。由于无法满足所需到达时间,取消预期燃料消耗为6l的分配为等级1的路线。
62.可以使用针对每个车速的先前存储的平均燃料经济性表来计算每个路线的预期燃料消耗,并且可以将较高的等级给予具有较小燃料消耗的路线。
63.处理器30可以使用从输入器50输入的车辆的目的地来设置行驶路线,并且同时确定补充策略。特别地,当从输入器50输入所需到达时间时,处理器30可以通过考虑所需到达时间以及目的地来确定补充策略,同时设置行驶路线。
64.处理器30可以基于在导航20中设置的行驶路线来计算车辆的预期燃料经济性,基于计算出的预期燃料经济性和处理器30估算的能源的补充量,来计算可用行驶距离或所需补充量,并且基于计算出的可用行驶距离或所需补充量确定补充策略。
65.处理器30可以基于导航20设置的行驶路线来计算车辆的预期燃料经济性。具体
地,处理器30可以考虑行驶路线的道路状况(例如,高速公路、国道、未铺砌的道路等)、实时交通状况(拥挤,轻交通量等)来计算预期燃料经济性,并且还可以通过使用先前存储在车辆中的行驶数据或燃料经济性数据来计算车辆的预期燃料经济性。
66.另外,处理器30可以基于计算出的预期燃料经济性和处理器30估算的能源的补充量,计算可用行驶距离或所需补充量。
67.在一个实施例中,处理器30可以通过将计算出的预期燃料经济性乘以估算的能源的补充量,来计算可用行驶距离。处理器30可以确定补充策略以在搜索到的能源的补充站之中的位于计算出的可用行驶距离内的补充站处补充。
68.在另一个实施例中,处理器30可以使用设置的行驶路线和计算出的预期燃料经济性来计算所需能源量,并且通过将计算出的所需能源量与估算的能源的补充量进行比较来计算所需补充量。处理器30可以基于所需补充量确定在行驶路线上补充能源的补充次数和补充量作为补充策略。
69.在另一个实施例中,处理器30可以通过同时使用可用行驶距离和所需补充量来确定补充策略。处理器30可以确定补充策略以补充所需补充量,但是可以确定在可用行驶距离之前补充的补充策略。特别地,处理器30可以根据从后文描述的多个策略中选择的策略来确定补充次数和补充量。
70.在一个实施例中,处理器30可以确定补充策略,使得在后文描述的多个策略中的最小时间策略的情况下,考虑到车辆的最大补充量,将补充次数最小化。
71.在另一个实施例中,即使补充次数增加,处理器30可以确定补充策略以使补充成本最小化,以便在后文描述的多个策略中的最小成本策略的情况下最小化补充成本。特别地,为了行驶到在可用行驶距离内使补充成本最小化的补充站,处理器30可以在补充成本最小化的补充站,对与所需补充量的一部分相对应的能源进行补充,然后对与剩余所需补充量相对应的能源进行补充。
72.也就是说,处理器30可以生成包括下文描述的最小时间策略或最小成本策略的多个预设策略作为补充策略,并且选择生成的多个策略中的一个。
73.具体地,处理器30可以接收用户手动地从多个策略中选择的补充策略,或者可以基于车辆的驾驶模式自动选择补充策略。
74.也就是说,处理器30可以通过输入器50接收用户手动生成的多个策略中的一个的选择。
75.另外,处理器30可以基于车辆的驾驶模式自动选择补充策略。车辆的驾驶模式可以是在导航20中设置行驶路线的驾驶模式,或者是控制车辆的转向、加速和减速等的驾驶模式。在一个实施例中,当车辆的驾驶模式为环保模式时,处理器30可以选择最小成本策略,而当车辆的驾驶模式为运动模式时,处理器30可以选择最小时间策略。
76.处理器30可以基于搜索到的补充站的成本信息来计算能源的补充成本,并且确定使计算出的补充成本最小化的最小成本策略作为补充策略。
77.补充站的成本信息可以是在相应的补充站出售的能源的成本,或者可以是反映诸如折扣之类的促销的成本。
78.更具体地,处理器30可以基于输入的或预先存储的车辆的支付信息或用户的支付信息来计算能源的补充成本。
79.在用卡支付的情况下,输入的或预先存储的车辆的支付信息或用户的支付信息可以包括诸如折扣或与卡相对应的奖励之类的福利。用户的支付信息可以直接或间接地输入或预先存储在车辆中,并且车辆支付信息可以通过汽车支付(car pay)等预先存储在车辆中。
80.也就是说,处理器30可以通过同时反映补充站的成本信息和车辆或用户的支付信息来计算能源的补充成本,并且可以确定使计算出的补充成本最小化的最小成本策略。
81.还参照图2c,当处理器30确定最小成本策略座为补充策略时,行驶控制器40基于在导航20中设置的行驶路线的行驶信息将行驶路线划分为多个部分,为每个部分分配所需时间,并且根据为每个部分分配的所需时间和行驶信息,基于最佳燃料经济性来控制车辆的行驶。
82.驾驶控制器40可以通过将行驶路线划分为多个部分并控制车辆以在考虑到分配给每个部分的所需时间的同时使燃料消耗最小化,来在所需到达时间内到达目的地的前提下使车辆的燃料经济性最大化。
83.具体地,行驶控制器40可以通过反映行驶路线的每个部分的当前交通状况来生成行驶概况。在此,多个部分可以根据诸如城市中的高速公路和拥挤道路之类的道路类型来划分,或者该部分可以根据当前交通状况根据道路的平均速度来划分。
84.行驶控制器40可以将行驶路线划分为如图2c所示的部分,并且为每个部分分配所需时间。在这种情况下,可以为每个区间分配所需时间,使得通过将预设的预定备用时间添加到每个部份的所需时间的总和而获得的值在所需到达时间的剩余时间内。
85.当将每个所需时间t1至t4分配给图2c所示的部分1至4时,可以分配t1至t4以便满足以下等式。
86.t1 t2 t3 t4 备用时间<=剩余时间
87.在此,为了使车辆即使由于交通状况恶化,行驶各部分所需的时间实际上比预期的要长的情况下,也尽可能地在所需到达时间内到达目的地,设定了备用时间。例如,可以将备用时间设置为剩余时间的大约5%。
88.特别地,行驶控制器40可以根据行驶信息,以具有最佳燃料经济性的速度来控制车辆的行驶。具体地,可以在满足对应部分的所需时间的范围内以尽可能接近经济速度的车速来驾驶车辆。可以基于每个车速的预先存储的平均燃料经济性表来设置经济速度。可以持续地更新每个速度的平均燃料经济性表。
89.可替代地,行驶控制器40可以通过在满足对应部分的所需时间的范围内以尽可能低的车速驾驶车辆来使车辆的燃料消耗最小化。
90.通常,这是因为随着车速的增加,燃料经济性趋于降低,因此当考虑到这种趋势时,在满足所需时间的范围内尽可能地降低车辆的行驶速度,从而最终使燃料效率最大化。
91.在另一个实施例中,处理器30可以基于搜索到的补充站的预期补充时间,来计算根据在导航20中设置的行驶路线的所需时间,并且确定使计算出的所需时间最小化的最小时间策略作为补充策略。
92.在此,可以考虑搜索到的补充站的拥挤程度、补充站处的补充器的数量、行驶路线中的补充站之前或之后的部分中的实时交通状况等,来计算预期补充时间。也就是说,可以将在相应的补充站停止并补充然后再次出发的情况,与跳过相应的补充站的情况之间的时
间差计算为预期补充时间。
93.处理器30可以基于最小时间策略中包括的补充站的成本信息来计算能源的补充成本,其中在最小时间策略中,计算出的所需时间被等同地计算,并确定使计算出的补充成本最小化的最小时间策略作为补充策略。
94.在此,计算出的所需时间被等同地计算的含义是指,计算出的所需时间在预设时间范围(例如5分钟)内不同的情况。
95.当针对多个最小时间策略的计算出的所需时间是相同等级时,处理器30可以确定使补充成本最小化的最小时间策略缩为补充策略。
96.当处理器30确定最小时间策略作为补充策略时,行驶控制器40根据导航20设置的行驶路线来控制车辆的行驶以使所需时间最小化。
97.更具体地,当处理器30确定最小时间策略作为补充策略时,行驶控制器40可以控制车辆的速度、车道和转向以使所需时间最小化。也就是说,驾驶控制器40可以通过主动改变车道控制、加速等来控制车辆的行驶以使所需时间最小化。
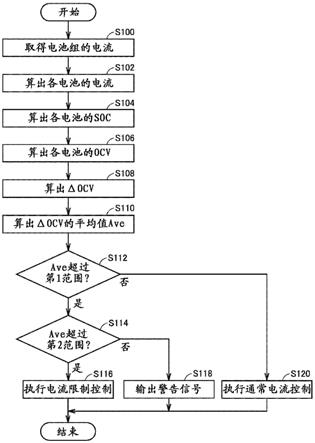
98.图3是根据本公开的实施例的控制车辆的自动驾驶的方法的流程图。
99.还参照图3,根据本公开的实施例的控制车辆的自动驾驶的方法包括以下步骤:基于车辆的目的地来设置行驶路线(s200);基于设置的行驶路线,搜索驱动车辆的驱动设备的能源的补充站(s300);基于能源的补充量、设置的行驶路线以及搜索到的补充站,来确定能源的补充策略(s600);以及根据设置的行驶路线和确定的补充策略来控制车辆的行驶(s700)。
100.在确定补充策略(s600)之前,还可以包括估算能源的补充量(s400)的步骤,并且可以实时估算能源的补充量。
101.在设置行驶路线(s200)的步骤之前,还可以包括接收车辆的目的地或选择性地接收车辆的所需到达时间(s100)的步骤,并且在确定补充策略(s600)的步骤中,当输入所述所需到达时间时,可以基于目的地和所需到达时间确定补充策略。
102.在确定补充策略(s600)的步骤之前,还可以包括以下步骤:基于设置的行驶路线计算车辆的预期燃料经济性(s400);以及基于计算出的期望燃料经济性和估算的能源的补充量,计算可用行驶距离或所需补充量(s500),并且在确定补充策略(s600)的步骤中,可以基于计算出的可用行驶距离或所需补充量来确定补充策略。
103.在确定补充策略(s600)的步骤中,可以基于搜索的补充站的成本信息来计算能源的补充成本,并且可以确定使计算出的补充成本最小化的最小成本策略作为补充策略。
104.在确定补充策略(s600)的步骤中,可以基于输入的或预先存储的车辆的支付信息或用户的支付信息来计算能源的补充成本。
105.在控制车辆的行驶(s700)的步骤中,当确定最小成本策略为补充策略时,可以基于设置的行驶路线的行驶信息将行驶路线划分为多个部分,可以为每个部分分配所需时间,并且可以根据为每个部分分配的所需时间和行驶信息,基于最佳燃料经济性来控制车辆的行驶。
106.在确定补充策略(s600)的步骤中,可以基于搜索到的补充站的预期补充时间,来计算根据设置的行驶路线的所需时间,并且可以确定使计算出的所需时间最小化的最小时间策略作为补充策略。
107.在确定补充策略(s600)的步骤中,可以基于最小时间策略中包括的补充站的成本信息来计算能源的补充成本,其中在最小时间策略中,计算出的所需时间被等同地计算,并且可以确定使计算出的补充成本最小化的最小时间策略作为补充策略。
108.在控制车辆的行驶(s700)的步骤中,当确定最小时间策略作为补充策略时,可以根据设置的行驶路线来控制车辆的行驶以使所需时间最小化。
109.在确定补充策略(s600)的步骤中,补充策略是用户从多个策略中手动输入的选择,或者补充策略是基于车辆的驾驶模式自动选择的。
110.尽管对本公开的特定实施例进行了示出和描述,但是对于本领域普通技术人员而言显而易见的是,在不脱离权利要求所提供的本公开的技术精神的前提下,可以对本公开进行各种改进和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。