1.本发明属于小径管内腔形貌检测领域,具体说是一种基于低相干干涉的非接触式小径管内腔形貌检测装置及方法。
背景技术:
2.小径管(如枪管、炮管等)工件的内腔形貌是否合格直接决定着工件能否可靠工作,精确测量小径管内腔形貌具有十分重要的意义。根据测量手段,可将小径管内腔形貌测量分为两类:接触式测量、非接触式测量。其中接触式测量大多需多次人工干预,测量效率低,且容易造成小径管内腔划伤、测量设备探头磨损,这也导致接触式测量不适用于小径管内腔测量,现有的小径管内腔形貌测量逐渐以非接触式的方法为主。
3.非接触式的方法主要有光电检测法、射线检测法、超声检测法、涡流检测法等。射线检测法无法检测一些含有特殊材质的工件,例如工件材料含铅的时候,可能导致测量失败,其次射线检测法对人体的伤害也较大;光电检测法虽然测量精度比较高,但其探头往往尺寸较大,无法伸入内腔尺寸较小的工件;涡流检测法则更适用于导体包覆层的检测,存在干扰因素较多,检测过程复杂;超声检测法具有检测速度快、成本低、对人无害等优点,但是测量精度不足,其测量误差一般都在毫米(mm)级,测量精度很难达到微米(um)级。而现代工业对小径管内部形貌测量的要求在不断提高,对于枪管、炮管内部的测量精度一般都要求在微米级。
4.低相干干涉技术作为一种新兴检测技术,在透镜厚度检测、生物组织成像等方面都有着广泛的应用,但是目前对小径管内腔形貌进行检测的方法中尚未发现基于低相干干涉技术的方法。
技术实现要素:
5.本发明目的是提供一种基于低相干干涉的非接触式小径管内腔形貌检测装置及方法,以实现小径管内腔形貌的微米级精度测量。
6.本发明为实现上述目的所采用的技术方案是:
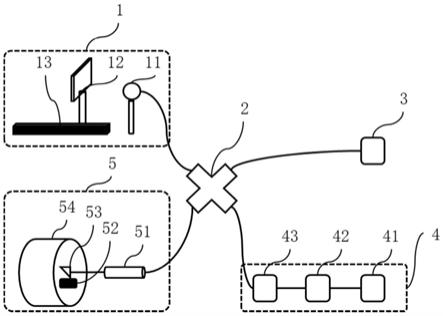
7.基于低相干干涉的非接触式小径管内腔形貌检测装置,包括参考臂、耦合器、宽带光源、数据采集与处理模块、测量臂;宽带光源通过光纤与耦合器连接,耦合器通过光纤与测量臂、参考臂连接分别输出参考光与测量光、耦合器还通过光纤连接数据采集与处理模块。
8.所述参考臂包括运动导轨、平面反射镜、准直镜;耦合器输出参考光经过准直镜准直后照射在平面反射镜上折返并原光路返回至耦合器,平面反射镜设于运动导轨上并与运动导轨滑动连接;运动导轨带动平面反射镜做直线运动,改变参考光的光程。
9.所述测量臂包括光纤滑环、螺旋进给装置、探头、待测小径管;耦合器通过光纤连接光纤滑环,输出测量光至光纤滑环的光纤再传输致探头,所述探头安装在螺旋进给装置上,螺旋进给装置伸入待测小径管的内腔并在管径内沿着中轴线方向螺旋前进,测量光经
探头聚焦、准直照射待测小径管内腔管壁折返并原光路返回至耦合器;完成整个小径管内腔形貌的检测。
10.所述数据采集与处理模块包括依次光纤连接的计算机、数据采集卡、光电探测器;耦合器接收折返的参考光和测量光,并将二者的干涉信号经光纤传导至光电探测器输出干涉电信号,数据采集卡采集电信号转为数字信号发送给计算机。
11.所述螺旋进给装置包括直线导轨和设在其上的旋转运动机构,所述旋转运动机构为中空电控旋转台,所述中空电控旋转台与直线导轨滑动连接,光纤滑环与探头分别通过法兰固定在中空电控旋转台的两侧。
12.所述光纤滑环包括是光纤滑环前端、光纤滑环后端,光纤滑环前端通过法兰固定在中空电控旋转台的一侧,光纤滑环后端与耦合器固定相连;
13.所述探头包括探头后端固定座和设在其一端的三棱镜,探头后端固定座另一端与中空电控旋转台通过法兰连接,三棱镜的截面为直角三角形,三角形两条直角边所在的端面分别为探头前端入射面和探头前端出射面,三角形斜边所在端面为探头前端全反射面,光纤滑环的光纤输出端口水平射出测量光经探头前端入射面照射在探头前端全反射面反射,然后经探头前端出射面以垂直方向射出照射在内腔管壁上。
14.基于低相干干涉的非接触式小径管内腔形貌检测方法,该方法是基于以上所述的装置实现的,其特征在于,包括以下步骤:
15.步骤1:控制探头对整个待测小径管内腔按照预设轨迹进行逐点扫描,并在每个待测点处获取探头轨迹点的三维坐标以及该待测点处参考光与测量光发生干涉时运动导轨的坐标值d
i
,依据参考光与测量光光程相等发生干涉原理依次获得整个待测小径管内腔所有待测点的三维坐标;
16.步骤2:在同一坐标系下拼接所有待测点三维坐标,得到待测小径管内腔的完整三维形貌。
17.所述控制探头对整个待测小径管内腔按照预设轨迹进行逐点扫描,包括:
18.数据采集与处理模块的计算机输出指令控制测量臂的螺旋进给装置带动探头按照预设轨迹分别移动到待检测小径管内腔的轨迹点(x
i
,y
i
,z
i
)。
19.所述参考光光程为:参考光光纤输出端口、准直镜、平面反射镜之间折返形成参考光的光程;
20.所述测量光程为:光纤输出端口输出的测量光在探头前端入射面、探头前端全反射面、探头前端出射面、待测小径管内腔表面之间折返形成测量光的光程。
21.所述获取参考光与测量光发生干涉时运动导轨的坐标值d
i
;包括:
22.计算机输出指令控制参考臂的平面反射镜在运动导轨上移动,并通过数据采集与处理模块的光电探测器实时检测折返干涉信号的光强值,并在光强值达到最大时判定为参考光与测量光发生干涉,数据采集与处理模块的计算机记录此时运动导轨的坐标值d0;
23.由于依据参考光与测量光的光程差为零是发生干涉,得到此时小径管内腔的当前待测点的三维坐标(x
i
,y
i
,z
i
d
i
)。
24.进一步的,所述的运动导轨、直线导轨均为直线运动模组,直线运动模组的电机均还连接计算机。
25.进一步的,所述螺旋进给装置带动探头按照预设轨迹移动是沿着小径管内腔的中
轴线方向进行的螺旋进给运动。
26.本发明具有以下有益效果及优点:
27.1.本发明提出的基于低相干干涉的非接触式小径管内腔形貌检测装置,利用高精度的运动导轨,实现高精度小径管内腔形貌的检测,相比于其它现有方法,该装置能将测量精度从毫米级提升到微米级;测量精度与运动导轨的精度相当。以精度为1微米的导轨为例,该装置的测量精度也为1微米。
28.2.本发明提出的探头直径很小,可达0.5毫米,可以测量直径很细的管腔。
29.3.本发明提出的基于低相干干涉的非接触式小径管内腔形貌检测装置不受检测材料的限制,可测量含多种材料的小径管内腔形貌。
附图说明
30.图1为本发明检测装置示意图;
31.图2为本发明的测量臂结构示意图;
32.图3为本发明的探头、螺旋进给装置、光纤滑详细组合结构示意图;
33.图4为本发明一种基于低相干干涉的非接触式小径管内腔形貌检测流程图;
34.其中,1是参考臂、2是耦合器、3是宽带光源、4是数据采集与处理模块、5是测量臂、11是准直镜、12是平面反射镜、13是运动导轨;41是计算机、42是数据采集卡、43是光电探测器;51是光纤滑环、52是螺旋进给装置、53是探头、54是待测小径管;511是光纤滑环前端,512是光纤滑环后端,521是直线导轨、522是旋转运动机构,531是探头后端,532是探头前端入射面,533是探头前端全反射面,534是探头前端出射面。
具体实施方式
35.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方法做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
36.除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
37.如图1所示,基于低相干干涉的非接触式小径管内腔形貌检测装置包括参考臂1、耦合器2、宽带光源3、数据采集与处理模块4、测量臂5。参考臂1包括运动导轨13、平面反射镜12、准直镜11;数据采集与处理模块4包括光电探测器43、数据采集卡42、高性能计算机41;测量臂5包括光纤滑环51、螺旋进给装置52、探头53、待测小径管54。
38.宽带光源3发出的光经过光纤到达耦合器2被分为两路,分别进入参考臂1与测量臂5;进入参考臂5的光通过准直器11打在平面反射镜12上,再经平面反射镜反射由原路返回至耦合器2,且运动导轨13与平面反射镜12配合带动平面反射镜12从左向右移动扫描,改变参考光的光程;进入测量臂5的光经光纤传至光纤滑环51,光纤滑环51直接与探头53相连,参考光由探头53末端射出照射在待测小径管54内腔,再由原路反射至耦合器2处;参考光1与测量光5在耦合器2相遇,并发生干涉,产生的干涉信号由数据采集与处理模块4接收
并进行处理,解算待测点三维坐标。螺旋进给装置52带动探头53扫描待测小径管54内腔的所有待测点,实现整个待测小径管内部形貌的检测。
39.结合图2,光纤滑环51由光纤滑环前端511和光纤滑环后端512组成,光纤滑环的前端与后端可在保证光路畅通的情况下进行360度旋转,光纤滑环后端512与耦合器2相连,光纤滑环前端511与探头后端531相连;探头53与螺旋进给装置52配合使用,螺旋进给装置52由直线导轨521和旋转机构522组成,旋转机构522通过螺丝固定在直线导轨521上,旋转机构522与探头后端531配合带动探头旋转,直线运动与旋转运动组合构成螺旋进给,测量探头尺寸并读取螺旋进给装置52给出的位移值,通过坐标转换算出探头前端出射面534的三维坐标;探头后端531内部是单模光纤,外部为保护层,测量光经光纤滑环后进入探头前端入射面532,再经探头前端全反射面533反射,将测量光由水平方向转为垂直方向从探头前端出射面534射出打在待测点上,并被待测点反射,再经相同的光路返回。探头53反射式准直器与内置光纤的细金属杆连接组成。光纤滑环51与螺旋进给装置52配合可保证探头53无死角的螺旋前进。
40.结合图3,参考光与测量光的光程是特殊设计的。具体地说,对于参考臂来说,当平面反射镜12在运动导轨的最左边的零点处时,参考光的光程为耦合器2到准直镜11再到平面反射镜12的距离的2倍,记为d
ri
,对于测量臂来说,我们设置耦合器2到光纤滑环51再到探头前端出射面534的距离为d
ri
/2。假设探头前端出射面534与待测点的距离为未知数x,则测量光的光程为d
ri
2x,假设平面镜12由运动导轨零点从左向右时,当运动导轨运动至坐标d处,产了干涉现象,则由此时参考光与测量光光程相等,可构造等式2x=2d,即探头前端出射面534至待测点的距离为x=d,再与探头的三维坐标结合,即可解算出待测点的三维坐标。
41.本实施例中,旋转运动机构522为中空电控旋转台,型号为mrs300系列中空电控旋转台。
42.根据本技术的另一个方面,提供了一种基于低相干干涉的非接触式小径管内腔形貌检测方法,该方法采用前述的基于低相干干涉的非接触式小径管内腔形貌检测装置,结合图4,基于低相干干涉的非接触式小径管内腔形貌检测方法包括如下4个步骤:
43.步骤1:安装固定整个低相干将整个基于低相干干涉的非接触式小径管内腔形貌检测装置;
44.步骤2:以待测小径管54内腔第一个待测点为起始点,计算该起始点的三维坐标以及起始点处参考光与测量光光程相同时导轨的坐标值d0;具体地,结合图2,测量光从探头前端出射面534射出,照射在待测小径管54内腔第一个待测点上并被反射,再由相同的光路到达耦合器2,以螺旋进给装置的轴建立坐标系,此时探头53的三维坐标(x0,y0,z0)由螺旋进给装置52给出;于此同时参考光经参考臂1从准直镜11打到平面反射镜12,经平面反射镜12反射后由相同的光路到达耦合器2,运动导轨13带动平面反射镜12从左向右运动改变参考光的光程,高性能计算机41记录运动导轨当前坐标值,并通过数据采集卡42同步地采集光电探测器43检测到的光强值;当参考光与测量光的光程相等时,发生相干干涉,光电探测器测得的光强值达到最大,当光强值达到最大时,记录此时运动导轨的坐标值d0,此时探头前端出射面534至待测点的距离为d0,因此初始点的三维坐标可表达为(x0,y0,z0 d0)。运动导轨定位精度为微米级;值得注意的是还可以采用更高定位精度的导轨以实现更高精度的
小径管内腔形貌检测。
45.步骤3:在获得初始点的三维坐标后,螺旋进给装置52带动探头53移动至下一点,测量下一待测点的三维坐标。与步骤2类似,此时探头53的三维坐标(x
i
,y
i
,z
i
)由螺旋进给装置给出;运动导轨13带动平面反射镜12从左向右运动,数据采集卡42同步采集光电探测器43采集到的光强值,并送入高性能计算机41进行数据处理,寻找并记录光强值达到最大值时运动导轨的坐标d
i
;运动导轨的坐标的改变是由于待测小径管54内腔形貌的改变导致的,因此待测点的三维坐标为(x
i
,y
i
,z
i
d
i
);重复上述过程,直到整个待测小径管54内腔内的所有待测点都被测量。
46.步骤4:在同一坐标系中绘制所有点,拼接出待测小径管54完整的内腔形貌。
47.本实施例提供的基于低相干干涉的非接触式小径管内腔形貌检测装置测量方便且测量精度高。
48.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。