1.本发明涉及变形装置、曝光装置和制造物品的方法。
背景技术:
2.用于制造半导体器件、液晶显示器件等的曝光装置需要校正投影光学系统的光学像差,以改善成像特性。因此,曝光装置可以设置有光学装置,该光学装置通过使用多个致动器向投影光学系统的反射镜施加力使反射镜变形来校正投影光学系统的光学像差。对于该光学装置,从精确控制反射镜的变形的角度来看,优选的是使用抗滞后的致动器,例如具有线圈和磁体的音圈电机(下文有时称为“vcm”)。
3.在这种情况下,如果光学装置具有已经发生了异常的致动器,则反射镜的光学像差可能无法通过被精确地变形而得到充分的校正。由于这个原因,优选的是定期检查(检测)每个致动器的异常。日本专利特开no.2015
‑
65246提出了一种校正光学装置中的每个vcm的推力变化的方法。更具体地,多个vcm中的参考vcm被驱动单位量,以测量在其余vcm的线圈中产生的感应电动势。根据测量结果对其余vcm的推力变化进行校正。
4.当像日本专利特开no.2015
‑
65246中公开的方法那样驱动参考vcm单位量时,在其余vcm的线圈中产生的感应电动势是微小的,并且信噪比非常低。这会导致难以根据感应电动势有效且准确地检测每个致动器中的异常。
技术实现要素:
5.本发明提供了一种在有效且准确地检测使诸如光学元件(反射镜)之类的构件的表面变形的致动器中的异常方面有利的技术。
6.根据本发明的一个方面,提供了一种变形装置,其使构件的表面变形,变形装置包括:多个致动器,每个致动器构造成向所述构件施加力以使所述表面变形;测量设备,其构造成测量在所述多个致动器中的第一致动器中产生的感应电动势;以及控制器,其构造成控制所述多个致动器,其中,控制器在使用所述多个致动器中的与第一致动器不同的第二致动器振动所述构件的同时使测量设备测量第一致动器中的感应电动势的经时变化、将测量的感应电动势的经时变化转换为频谱、并且根据所述频谱检测第一致动器中的异常。
7.通过下文参考附图对示例性实施例的描述,本发明的其他特征将变得显而易见。
附图说明
8.图1是示出了根据第一实施例的变形装置的布置的示意图;
9.图2是示出了检测目标vcm中的异常的方法的流程图;
10.图3a是示出了目标vcm的感应电动势的经时变化的示例的曲线图;
11.图3b是示出了频谱的示例的曲线图;
12.图4a至4c是用于解释通过驱动振动vcm的方法获得的目标vcm中的感应电动势的经时变化和频谱的曲线图;
13.图5是示出了检测多个致动器中的异常的方法的流程图;
14.图6a和6b是示出了选择振动vcm的示例的视图;
15.图7是示出了根据第二实施例的变形装置的布置的示意图;
16.图8是示出了根据第三实施例的变形装置的布置的示意图;
17.图9是示出了根据第四实施例的变形装置的布置的示意图;
18.图10是示出了曝光装置的布置的示意图;
19.图11是示出了曝光装置中的曝光顺序的流程图;以及
20.图12是示出了如何对基板上的每个拍摄区域进行扫描曝光的视图。
具体实施方式
21.下面,将参照附图详细描述各实施例。注意,以下实施例不旨在限制所要求保护的发明的范围。在各实施例中描述了多个特征,但发明并不限制为需要所有这些特征,多个这些特征可以适当地组合。此外,在附图中,相同的附图标记被赋予相同或类似的构造,并且省略其冗余描述。
22.下面描述的每个实施例将例举反射镜(光学元件)作为要被变形的目标构件。然而,反射镜可以用其它光学元件(透镜、棱镜或平行板棱镜)、其它构件(掩膜台或基板台)等代替。此外,每个实施例将例举音圈电机(vcm)作为用于使反射镜(光学元件)的反射表面(光学表面)变形的致动器。然而,音圈电机可以用使用电磁力的致动器(例如,线性马达或螺线管)来代替。致动器布置在光学元件和支撑光学元件的底板之间,并且可以由固定至光学元件和底板中的一者上的磁体和固定至光学元件和底板中的另一者上的线圈构成。例如,致动器的磁体和线圈中的一者布置在光学元件的位于与光学表面相反的一侧的表面上,磁体和线圈中的另一者布置在底板上。使电流在线圈中流动可以向光学元件施加力并使光学元件的光学表面变形。
23.<第一实施例>
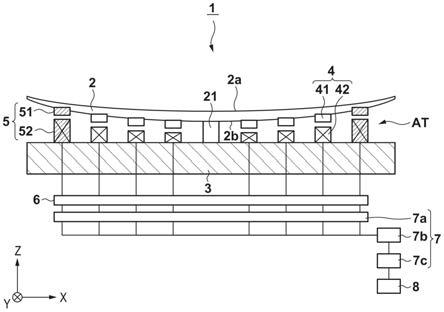
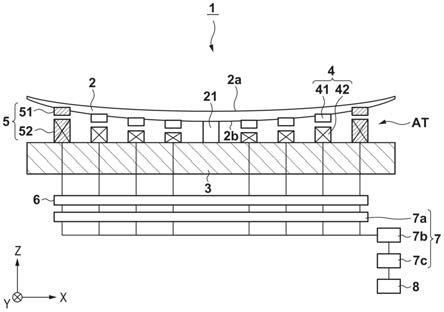
24.图1是示出了根据本发明的第一实施例的变形装置1的布置的示意图。根据本实施例的变形装置1是使反射镜2的反射表面2a(光学表面)变形的光学装置。变形装置1可以包括例如反射镜保持构件21、底板3、多个致动器at、测量设备6、控制器7和显示单元8。
25.反射镜2通过反射镜保持构件21由底板3支撑。底板3附接至变形装置1的外壳(未示出)。变形装置1与光接收元件、其他光学系统等结合使用。
26.所述多个致动器at各自可以用作在使反射镜2的反射表面2a变形为所需的形状时(即,在变形装置1中的除检测异常以外的操作中)向反射镜2施加力的致动器。与此相反,在变形装置1进行异常检测时,所述多个致动器at各自被赋予目标致动器4(第一致动器)和振动致动器5(第二致动器)中的任一个功能。目标致动器4是要通过用测量设备6测量感应电动势来检测异常的致动器。在本实施例中,音圈电机(vcm)用作目标致动器4,其在下文中有时会被称为目标vcm 4。振动致动器5是在检测到目标致动器4(vcm 4)中的异常时通过向反射镜2的相反表面2b(位于与反射表面2a相反的一侧上的表面)施加力来振动反射镜2(对其施加振动)的致动器。在本实施例中,使用音圈电机(vcm)作为振动致动器5,其在下文中有时会被称为振动vcm 5。
27.在这种情况下,目标致动器4和振动致动器5的功能可以彼此互换。例如,在变形装
置1检测到异常时,可以根据情况从所述多个致动器at中选择这些功能。此外,在本实施例中,使用相同类型的致动器(vcm)作为目标致动器4和振动致动器5。然而,这并不是详尽的,可以使用不同类型的致动器。即,作为振动致动器5,可以使用不同于vcm的致动器。致动器at的数量没有具体限制,而是可以根据例如反射镜2的反射表面2a所需的形状精度任意地设定。
28.vcm 4包括布置在反射镜2的相反表面2b上的可动元件41和布置在底板3上的定子42。在本实施例中,可动元件41和定子42分别是磁体和线圈,使得在反射镜2上的可动元件侧上不布置例如布线的额外元件。同样,振动vcm 5包括作为布置在反射镜2的相反表面2b上的可动元件51的磁体和布置在底板3上的定子52,并且向反射镜2的相反表面2b施加力。目标vcm 4的数量和振动vcm 5的数量可以根据变形装置1中的异常(即目标vcm 4中的异常)的检测精度来任意地设定。然而,振动vcm 5的数量优选小于目标vcm 4的数量,以允许通过用例如一个振动vcm 5振动反射镜2来检测多个目标vcm 4中的异常。
29.为所述多个致动器at中的每一个提供测量设备6,以测量在所述多个目标vcm 4中的每一个中产生的感应电动势(感应电压)。在本实施例中,测量设备6通过使用多个致动器at中的振动vcm 5振动反射镜2来测量在目标vcm 4的线圈中产生的感应电动势。
30.控制器7由例如具有cpu、存储器等的计算机构成,并且控制整个变形装置1。在本实施例中,控制器7可以包括驱动控制器7a、处理器7b(运算单元)和存储单元7c。驱动控制器7a控制所述多个致动器at中的每一个的驱动。处理器7b根据由测量设备6测得的感应电动势来检测目标vcm 4中的异常。存储单元7c具有例如存储器的存储介质,并且存储各种类型的数据和信息。
31.根据本实施例的变形装置1包括显示单元8(显示器)。显示单元8可以显示其中已经通过控制器7(处理器7b)检测到异常的致动器at(目标vcm 4)的位置信息。在这种情况下,根据本实施例,显示单元8是变形装置1的组成元件。然而,这并不是详尽的,显示单元8也可以是不同于变形装置1的外部装置的组成元件。在这种情况下,变形装置1的控制器7(处理器7b)可以通过向外部装置传输(输出)其中已经检测到异常的致动器at(目标vcm 4)的位置信息来通知用户(操作者)变形装置1中的异常情况。
32.[检测目标vcm中的异常的方法]
[0033]
在上述变形装置1中,由于例如随时间的劣化,有时在各个致动器at中发生异常。用作各个致动器的vcm由处于非接触状态的磁体(可动元件)和线圈(定子)构成。只有线圈可以直接检测异常。由于这个原因,磁体中的异常(例如磁体从反射镜2剥离或掉落)需要根据当磁体和线圈之间的距离改变时在线圈中产生的感应电动势的测量结果来间接检测。
[0034]
然而,当通过向反射镜2施加外力使磁体和线圈之间的距离改变预定量(单位量)时,在线圈中产生的感应电动势是微小的,并且信噪比非常低。由于这个原因,只使用感应电动势的测量结果而不进行任何处理会使得难以检测致动器at(磁体)中的异常。因此,根据本实施例的控制器7在使用振动vcm 5振动反射镜2的同时使测量设备6测量目标vcm 4(线圈)的感应电动势的经时变化(随时间变化)。控制器7将测量的感应电动势的经时变化转换为频谱,并且根据频谱检测目标vcm 4中的异常。频谱被定义为表示对于每个频率(即,相对于每个频率)感应电动势的强度的信息,并且被表示为曲线图,曲线图的横轴代表频率、纵轴代表感应电动势的强度。
[0035]
在这种情况下,本实施例中可以检测到的异常类型包括例如可动元件41(磁体)的位置变化、可动元件41的温度变化引起的磁导率变化、可动元件41的断裂、以及可动元件41相对于反射镜2的未安装、剥离和掉落。当可动元件41的位置变化时,到定子42(线圈)的交链磁通量变化,因此感应电动势也随着交链磁通量的增加/减少而变化。当可动元件41的磁导率发生变化时,感应电动势根据磁导率的变化量而改变。此外,当可动元件发生未安装、断裂、剥落或掉落时,感应电动势会大大降低。
[0036]
图2是示出了根据本实施例的检测目标vcm 4中的异常的方法的流程图。为简单起见,下面将描述通过使用一个振动vcm 5来检测一个目标vcm 4中的异常的示例。注意,控制器7可以控制图2所示的流程图中的每个步骤。
[0037]
在步骤s101中,控制器7开始通过开始使用驱动控制器7a驱动振动vcm 5来振动反射镜2。作为驱动振动vcm 5的方法,可以使用任意的驱动方法。例如,可以使用脉冲式驱动方法、脉动式驱动方法、逐步驱动方法和基于单一频率的周期性驱动方法。优选使用周期性驱动方法来连续地振动反射镜2。
[0038]
例如,控制器7可以执行周期性驱动来控制(驱动)振动vcm 5,使得反射镜2的振动频率包括单一频率成分。替代地,控制器7可以控制振动vcm 5以使得反射镜2的振动频率包括多种频率成分。控制振动vcm 5以使得振动频率包括多种频率成分的方法包括控制振动vcm 5以便对反射镜2的振动频率进行扫频的方法、和控制振动vcm 5以使反射镜2的振动频率包括白噪声的方法。控制器7可以控制振动vcm 5以使得反射镜2的振动频率包括反射镜2的共振频率。控制振动vcm 5以使振动频率包括反射镜2的共振频率可以容易地增大反射镜2的振动。在这种情况下,可以根据反射镜2的尺寸、重量等适当地改变反射镜2的振动频率的扫频范围。例如,这个范围可以设定为从20hz到120hz的范围。此外,白噪声指包括音频成分的噪声。
[0039]
在步骤s102中,控制器7使测量设备6测量在目标vcm 4中产生的感应电动势的经时变化(随时间变化)。例如,控制器7可以通过在使振动vcm 5在预定期间内振动反射镜2的同时使测量设备6连续地测量在目标vcm 4中产生的感应电动势来获得在目标vcm 4中产生的感应电动势的经时变化。在完成对目标vcm 4中产生的感应电动势的经时变化的测量后,控制器7前进到步骤s103以使振动vcm5完成对反射镜2的振动。
[0040]
图3a示出了由测量设备6测量的目标vcm 4中的感应电动势的经时变化的示例。感应电动势的经时变化被定义为表示感应电动势的强度关于自开始测量经过的时间的信息,并且被表示为曲线图,曲线图的横轴代表自开始测量经过的时间t,纵轴代表由测量设备6测量的感应电动势的强度v,如图3a所示。参照图3a,实线表示当目标vcm 4出现异常时测量的感应电动势的经时变化,虚线表示当目标vcm 4不存在异常时测量的感应电动势的经时变化。显然,如图3a所示,使用由测量设备6本身测量的感应电动势的经时变化使得难以检测目标vcm 4是否存在异常,这是因为感应电动势的测量值被埋没在噪声、二次谐波等之中。
[0041]
在步骤s104中,控制器7(处理器7b)将步骤s102中测得的感应电动势的经时变化转换为频谱。例如,控制器7可以通过对在步骤s102中测得的感应电动势的经时变化执行fft(快速傅里叶变换)来获得(计算)目标vcm 4中的感应电动势的频谱。
[0042]
图3b示出了通过对目标vcm 4中的感应电动势的经时变化的测量结果进行快速傅
5来振动反射镜2的其上布置有多个目标vcm 4的区域。
[0052]
例如,在此过程中,控制器7可以选择振动vcm 5a至5d,如图6a所示。图6a示出了从布置在反射镜2上的多个致动器at中选择振动vcm 5的示例。参照图6a,所述多个致动器at中的四个致动器at(其围绕反射镜保持构件21的中心以45
°
的间隔布置在反射镜2的外周部分上)被选择为振动vcm 5a至5d。图6a还示出了反射镜2上的可以分别由振动vcm 5a至5d振动的范围9a至9d。多个致动器at分别作为目标vcm 4布置在范围9a至9d内。
[0053]
在图6a所示的示例中,布置在反射镜2的外周部分上的致动器at被选择为振动vcm 5。然而,布置在反射镜2的内周部分上的致动器at也可以被选择为振动vcm 5。此外,振动vcm 5的数量可以任意地确定。如图6a所示,围绕反射镜2的中心点对称地布置振动vcm 5在减少反射镜2的振动不均匀性方面是有效的。
[0054]
在这种情况下,随着振动vcm 5的数量减少,可以在更多的目标vcm 4中测量感应电动势,但是反射镜2的振动量会减少。与此相反,随着振动vcm 5的数量增加,可以测量感应电动势的目标vcm4的数量减少,但反射镜2的振动量会增加。当反射镜2被振动vcm5振动时,目标vcm 4的附接至反射镜2的相反表面2b上的可动元件41(磁体)振动。随着可动元件41振动,延伸通过目标vcm 4的定子42(线圈)的交链磁通量发生变化。这可以在定子42(线圈)中产生感应电动势。
[0055]
在步骤s202中,控制器7开始通过使用在步骤s201中选择的振动vcm 5a至5d来振动反射镜2。在此过程中,控制器7可以在同一相位中驱动振动vcm 5a至5d。然而,改变振动vcm 5被驱动的相位(驱动相位或控制相位)可以增大反射镜2的振动。例如,振动vcm5a和5b在同一相位中被驱动,而振动vcm 5c和5d在与振动vcm 5a和5b的相位相反的相位中被驱动。在这种情况下,可以作为一个整体有效地振动反射镜2并且增加反射镜2的振动量(变形量)。此外,当振动vcm 5相对于反射镜2的中心对称地布置时,以相反的相位驱动振动vcm 5会提供有利的效果。与此相反,当振动vcm5不对称地布置时,以不同于相反相位的相位驱动振动vcm 5有时会提供有利的效果。这种相位差可以根据在对反射镜2进行模态分析时整个反射镜2的振动状态、振动时的动态分析等而获得。
[0056]
在步骤s203中,控制器7使测量设备6测量在每个目标vcm 4的线圈中产生的感应电动势的经时变化。在完成对每个目标vcm 4中的感应电动势的经时变化的测量后,控制器7使振动vcm 5a至5d完成对反射镜2施加振动。在这个过程中,能够同时测量多个目标vcm 4中的感应电动势的经时变化。注意,步骤s203是与图2所示的流程图中的步骤s102和s103类似的过程,因此将省略对该过程的详细描述。
[0057]
在步骤s204中,控制器7将在步骤s203中测得的目标vcm 4中的感应电势的经时变化转换为频谱。在步骤s205中,控制器7通过对于每个目标vcm 4比较在步骤s204中获得的频谱和参考频谱来获得它们之间的差。可用的比较方法包括比较例如任意频率下的参考频谱与在步骤s204中获得的频谱的绝对值或相关系数。当脉冲状驱动方法、脉动状驱动方法或逐步驱动方法被用作驱动振动vcm 5的方法时,频率分布在较宽的频带中。因此,比较相关系数提供了有利的效果。与此相反,在要以单一频率执行驱动操作时,频率分布的峰值集中在驱动频率处。因此,比较在产生峰值的单一频率处的感应电动势的绝对值提供了有利的效果。注意,步骤s204和s205是与图2所示的流程图中的步骤s104和s105类似的过程,因此将省略对该过程的详细描述。
[0058]
在步骤s206中,控制器7确定每个目标vcm 4中是否已经发生了异常。例如,如果在步骤s205中获得的差等于或大于阈值,则控制器7可以确定在目标vcm 4中已经发生了异常。与此相反,如果该差小于阈值,则控制器7可以确定在目标vcm 4中没有发生异常。注意,步骤s206是与图2所示的流程图中的步骤s106至s108相似的过程,因此将省略对该过程的详细描述。
[0059]
在步骤s207中,控制器7确定是否已经在所有的致动器at中执行了异常检测。例如,在被选择为振动vcm 5的致动器at中还未执行异常检测。此外,如图6a所示,在没有布置在反射镜2上的范围9a
‑
9d(在步骤s201中选择的振动vcm 5a至5d可以对这些区域施加振动)内的致动器at中还未执行异常检测。如果在这种情况下有任何未进行异常检测的致动器at,则过程前进到步骤s208。与此相反,如果在所有致动器at中都已经执行了异常检测,则过程前进到步骤s215,在该步骤中控制器7开始驱动目标vcm 4(即,向线圈供应电力)以使反射镜2变形为所需的形状。
[0060]
如果控制器7在步骤s207中确定有在步骤s206中已确定发生异常的目标vcm 4,则过程前进到步骤s208。如果没有已确定发生异常的目标vcm 4,则该过程可以前进到步骤s215。注意,如果已确定发生异常的目标vcm 4的数量少,则可能在目标vcm 4本身中已经发生了异常。与此相反,如果已确定发生异常的目标vcm 4的数量大,则极有可能在振动vcm 5中已经发生了异常并且振动没有正确地施加至反射镜2。
[0061]
在步骤s208中,控制器7从多个致动器at中重新选择要被驱动以振动反射镜2的振动vcm 5。例如,控制器7从在步骤s201中还未被选择为振动vcm 5的致动器at中选择振动vcm 5。即,控制器7可以选择与在步骤s201中被选择为振动vcm 5的致动器at不同的致动器作为振动vcm 5。例如,在这个过程中,控制器7可以选择振动vcm 5a’至5d’,如图6b所示。图6b示出了从布置在反射镜2上的多个致动器at中选择振动vcm 5的示例。图6b还示出了反射镜2上的可以分别被振动vcm 5a’至5d’振动的范围9a’至9d’。未包括在图6a中的范围9a至9d中的致动器at分别被作为目标vcm4布置在范围9a’至9d’中。
[0062]
步骤s209至s213是类似于上述步骤s202至s206的过程。在步骤s209中,控制器7开始通过使用在步骤s208中选择的振动vcm 5a’至5d’来向反射镜2施加振动。在步骤s210中,控制器7使测量设备6测量在每个目标vcm 4的线圈中产生的感应电动势的经时变化,并且在完成对每个目标vcm 4中的感应电动势的经时变化的测量时使振动vcm 5a’至5d’完成对反射镜2的振动。在步骤s211中,控制器7将在步骤s210中测得的每个目标vcm 4中的感应电动势的经时变化转换为频谱。在步骤s212中,控制器7对于每个目标vcm 4将在步骤s211中获得的频谱与参考频谱进行比较。在步骤s213中,控制器7确定在每个目标vcm 4中是否已经发生了异常。
[0063]
在步骤s214中,控制器7在显示单元8(显示器)上显示多个致动器at中的已经检测到异常的致动器at的位置信息。例如,控制器7可以在显示单元8上以呈不同颜色等的可识别状态显示已经检测到异常的致动器at和没有检测到异常的致动器at。在这种情况下,除了已经检测到异常的致动器at的位置信息之外,控制器7还可以在显示单元8上显示关于每个致动器at中的感应电动势的测量结果、从测量结果获得的频谱和类似信息。
[0064]
如上所述,根据本实施例的变形装置1在使用振动vcm 5振动反射镜2的同时使测量设备6测量目标vcm 4(线圈)中的感应电动势的经时变化。然后变形装置1将测量的感应
电动势的经时变化转换为频谱,并且根据该频谱检测目标vcm 4中的异常。即使由测量设备6测量的感应电动势是微小的,也可以有效且准确地检测致动器at中的异常。
[0065]
<第二实施例>
[0066]
图7是示出了根据本发明的第二实施例的变形装置1的布置的示意图。如图7所示,根据本实施例的变形装置1包括接触型致动器53(例如压电元件)来代替振动vcm 5作为被驱动以振动反射镜2的致动器at。致动器53布置在底板3上以支撑反射镜2。除了上述第一实施例中的振动vcm 5被致动器53代替外,致动器53的布置和驱动方法根据上述描述是显而易见的,因此将省略对它们的详细描述。
[0067]
<第三实施例>
[0068]
图8是示出了根据本发明的第三实施例的变形装置1的布置的示意图。如图8所示,根据本实施例的变形装置1使反射镜保持构件21用作致动器53。反射镜2经由致动器53通过底板3支撑。在本实施例中,作为固定反射镜2的保持构件的致动器53可以对反射镜2施加振动。这减少了会干扰反射镜2振动的固定部分的数量并且因此可以极大地振动反射镜2,从而产生在每个目标vcm 4中生成大的感应电动势的有利效果。
[0069]
<第四实施例>
[0070]
图9是示出了根据本发明的第四实施例的变形装置1的布置的示意图。根据本实施例的变形装置1可以用来使代替反射镜2(光学元件)的构件(例如,板卡盘11(掩膜卡盘或基板卡盘))的表面(掩膜保持表面或基板保持构件)变形。本实施例通过用板卡盘11代替根据第一至第三实施例的反射镜2而获得。
[0071]
板卡盘11经由保持构件12通过底板3支撑。与反射镜2一样,板卡盘11的表面11a(保持表面)通过布置在板卡盘的位于与表面11a相反的一侧的表面(相反表面)11b上的致动器at而变形为所需的形状。致动器at的布置和驱动方法与上述第一实施例中的类似,因此将省略对它们的详细描述。
[0072]
<曝光装置的实施例>
[0073]
图10是示出了作为本发明的一个方面的曝光装置500的布置的示意图。曝光装置500是将掩模图案转印(形成)到基板上的光刻装置。曝光装置500包括照明光学系统il、投影光学系统po、保持和移动掩膜550的掩膜台ms、以及保持和移动基板560的基板台ws。曝光装置500还包括控制使基板560曝光的过程的控制器510。注意,本实施例中使用的x、y和z坐标轴不一定与第一至第四实施例中使用的x、y和z坐标轴重合。
[0074]
从光源(未示出)发出的光使用包括在照明光学系统il中的狭缝(未示出)在掩模550上形成例如在y方向上较长的弧形照明区域。掩膜550和基板560分别由掩膜台ms和基板台ws保持并且布置在光学共轭位置(投影光学系统po的物体表面和图像表面)处。投影光学系统po是具有预定的投影倍率并将掩膜550的图案投影到基板560上的光学系统。掩膜台ms和基板台ws以与投影光学系统po的投影倍率相对应的速度比在与投影光学系统po的物体表面平行的方向(例如x方向)上相对地扫描。这可以将掩模550的图案转印到基板560上。
[0075]
如图8所示,例如,投影光学系统po包括平面反射镜520、凹面反射镜530和凸面反射镜540。从照明光学系统il发出并穿过掩膜550的光的光路被平面反射镜520的第一表面520a弯折并进入凹面反射镜530的第一表面530a。由凹面反射镜530的第一表面530a反射的光被凸面反射镜540反射并进入凹面反射镜530的第二表面530b。被凹面反射镜530的第二
表面530b反射的光的光路被平面反射镜520的第二表面520b弯折,并且在基板560上形成图像。具有这种布置的投影光学系统po的凸面反射镜540的表面用作光瞳。
[0076]
在曝光装置500中,根据第一至第三实施例中的每个实施例的变形装置1被用作使包括在投影光学系统po中的反射镜的反射表面变形的光学装置。例如,变形装置1可以被用作使凹面反射镜530的反射表面变形的光学装置。这使得能够使凹面反射镜530的反射表面(第一表面530a和第二表面530b)变形为预定的形状并且准确地校正投影光学系统po的像差。此外,根据第四实施例的变形装置1可以用作使用于掩模550的掩模台ms的掩模卡盘的保持表面变形的装置和/或使用于基板560的基板台ws的基板卡盘的保持表面变形的装置。注意,曝光装置500的控制器510可以构造成包括变形装置1的控制器7。
[0077]
下面将描述曝光装置500的变形装置1(致动器at)中的异常检测的执行定时。图11是示出了曝光装置500中的曝光顺序的流程图。
[0078]
在步骤s301中,其表面涂有抗蚀剂的基板560被装载至曝光装置500中。在步骤s302中,检测形成在基板560上的标记的位置,并且使基板560在x和y方向上与曝光装置500对准。在步骤s303中,测量基板560上的预定表面位置以获得基板560的表面形状。在步骤s304中,基板560被移动来将曝光区域er定位在基板560上的预定位置处以开始曝光基板560上的目标拍摄区域(步进式移动)。根据在步骤s303中测得的表面形状使板110在z方向上对准以校正焦点。注意,曝光区域er是基板上的用来自投影光学系统po的光照射的区域。
[0079]
在步骤s305中,曝光区域er(投影光学系统po)和基板560被相对地扫描以对目标拍摄区域进行扫描曝光。在步骤s306中,确定基板560上是否存在任何未曝光的拍摄区域。如果存在未曝光的拍摄区域,则流程返回到步骤s303以对作为目标拍摄区域的未曝光拍摄区域进行扫描曝光。如果不存在未曝光的拍摄区域,则流程前进到步骤s307以从曝光装置500中卸载基板560。
[0080]
图12示出了如何对基板560上的多个(四个)拍摄区域560a至560d中的每一个执行上述扫描曝光(换句话说,曝光区域er如何在基板560上移动)。参照图12,箭头100表示在步骤s305中的扫描曝光中曝光区域er在基板560上的移动,箭头101表示在步骤s303中的步进式移动中曝光区域er在基板560上的移动。
[0081]
第一实施例中描述的变形装置1(致动器at)中的异常检测可以在图11所示的流程图中的步骤s305以外的过程中执行。即,变形装置1中的异常检测可以在步骤s301至s304、s306和s307中的任意定时处执行。例如,在重复执行扫描曝光时,可以在步进式移动中执行异常检测(参见步骤s303和图12中的箭头101)。
[0082]
<制造物品的方法的实施例>
[0083]
根据本发明的实施例的制造物品的方法适合于制造例如微器件(诸如半导体器件或具有微结构的元件)的物品。根据本实施例的制造物品的方法包括使用上述曝光装置在施加于基板上的光敏剂上形成潜影图案的步骤(曝光基板的步骤)和对在前述步骤中形成有潜影图案的基板进行显影(处理)的步骤。这种制造方法还包括其他已知的步骤(氧化、沉积、气相沉积、掺杂、平坦化、蚀刻、抗蚀剂分离、切割、粘合、包装等)。与传统方法相比,根据本实施例的制造物品的方法在物品的性能、质量、生产率和生产成本中的至少一个方面是有利的。
[0084]
<其他实施例>
[0085]
本发明的各实施例也可以通过系统或装置的计算机来实现,该计算机读取并执行记录在存储介质(其还可以被更完整地称为“非暂时性的计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行一个或多个上述实施例的功能、和/或该计算机包括用于执行一个或多个上述实施例的功能的一个或多个电路(例如,专用集成电路(asic)),并且本发明的各实施例还可以借助该系统或装置的计算机通过例如从存储介质读取并执行计算机可执行指令以执行一个或多个上述实施例的功能和/或通过控制所述一个或多个电路以执行一个或多个上述实施例的功能而执行的方法来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu))并且可以包括独立计算机或独立处理器的网络,以读取并执行计算机可执行指令。计算机可执行指令可以例如从网络或存储介质提供给计算机。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储器、光盘(例如光碟(cd)、数字化通用碟(dvd)、或蓝光盘(bd)
tm
)、闪存装置、存储卡等中的一个或多个。
[0086]
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
[0087]
尽管已经参考示例性实施例描述了本发明,但是应当理解,本发明不限于所公开的示例性实施例。以下权利要求的范围应被赋予最宽泛的解释,以涵盖所有这样的修改以及等同的结构和功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。