1.本发明的实施方式涉及基片处理装置和基片处理方法。
背景技术:
2.以往,已知有向对半导体晶片(下面也称为晶片)等基片进行处理的基片处理部中送入基片并将基片载置在基片处理部中的技术(参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018
‑
137383号公报
技术实现要素:
6.发明要解决的技术问题
7.本发明提供能够提高将基片载置在基片处理部内时的定心精度的技术。
8.用于解决技术问题的手段
9.本发明的一个方式的基片处理装置包括基片处理部、基片输送部、第1检测部、第2检测部和第3检测部。基片处理部用于保持基片并对基片进行处理。基片输送部具有转动轴,用于将所述基片送入所述基片处理部。第1检测部用于在沿着行进方向将所述基片送入所述基片处理部时,检测所述行进方向上的所述基片输送部相对于所述基片处理部的位置。第2检测部用于检测与所述行进方向垂直的方向上的所述基片输送部相对于所述基片处理部的位置。第3检测部用于检测所述基片输送部的所述转动轴相对于所述基片处理部的倾斜度。
10.发明效果
11.采用本发明,能够提高将基片载置在基片处理部内时的定心精度。
附图说明
12.图1是表示实施方式的基片处理系统的概略结构的示意图。
13.图2是表示实施方式的清洗单元的具体的结构例的示意图。
14.图3是表示实施方式的基片输送装置的平面图。
15.图4是表示实施方式的晶片检测单元的立体图。
16.图5是表示实施方式的基片输送装置和清洗单元的平面图。
17.图6是表示实施方式的第1检测部、第2检测部和第3检测部的平面图。
18.图7是图6所示的a
‑
a线的箭头向截面图。
19.图8是图6所示的b
‑
b线的箭头向截面图。
20.图9是图6所示的c
‑
c线的箭头向截面图。
21.图10是用于对实施方式的倾斜度检测处理进行说明的图。
22.图11是用于对实施方式的倾斜度检测处理进行说明的图。
23.图12是用于对实施方式的晶片的送入处理进行说明的图。
24.图13是用于对实施方式的晶片的送入处理进行说明的图。
25.图14是用于对实施方式的晶片的送入处理进行说明的图。
26.图15是表示实施方式的变形例1的第1检测部、第2检测部、第3检测部和叉形部的平面图。
27.图16是表示实施方式的变形例2的第1检测部、第2检测部、第3检测部和叉形部的平面图。
28.图17是表示实施方式的基片处理系统执行的送入处理的顺序的流程图。
29.附图标记说明
30.w晶片(基片的一个例子),1基片处理系统(基片处理装置的一个例子),6控制部,16清洗单元,17基片输送装置,25叉形部(基片输送部的一个例子),28a、28b、28c贯通孔,51第1检测部,51a发光部,51b受光部,52第2检测部,52a发光部,52b受光部,53第3检测部,53a发光部,53b受光部,72基片处理部。
具体实施方式
31.下面,参照附图,对本发明公开的基片处理装置和基片处理方法的实施方式进行详细说明。本发明并不受下面所示的各实施方式限定。需要注意的是,附图是示意性的,存在各要素的尺寸的关系、各要素的比例等与实际不相同的情况。而且,在附图之间也存在包含彼此的尺寸的关系或比例不同的部分的情况。
32.以往,已知有向对半导体晶片(下面也称为晶片)等基片进行处理的基片处理部中送入基片并将基片载置在基片处理部中的技术。但是,在送入基片的基片输送部的朝向倾斜的情况下,难以提高基片相对于基片处理部的定心精度。
33.因此,期待能够克服上述的问题,提高将基片载置在基片处理部内时的定心精度的技术。
34.<基片处理系统的概要>
35.首先,参照图1对实施方式的基片处理系统1的概略结构进行说明。图1是表示实施方式的基片处理系统1的概略结构的示意图。
36.基片处理系统1是基片处理装置的一个例子。下面,为了使位置关系明确,规定彼此正交的x轴、y轴和z轴,以z轴正方向为竖直向上的方向。
37.如图1所示,基片处理系统1包括送入送出站2和处理站3。送入送出站2与处理站3相邻地设置。
38.送入送出站2包括承载器载置部11和输送部12。在承载器载置部11可载置能够将多个基片、在第1实施方式中是半导体晶片w(下面称为晶片w)以水平状态收纳的多个承载器c。
39.输送部12与承载器载置部11相邻地设置,在内部设置有基片输送装置13和交接部14。基片输送装置13包括用于保持晶片w的晶片保持机构。基片输送装置13能够在水平方向和铅垂方向上移动并且能够以铅垂轴为中心转动,使用晶片保持机构在承载器c与交接部14之间进行晶片w的输送。
40.处理站3与输送部12相邻地设置。处理站3包括输送部15和多个清洗单元16。多个
清洗单元16在输送部15的两侧并排设置。
41.输送部15在内部设置有基片输送装置17。基片输送装置17具有用于保持晶片w的晶片保持机构。基片输送装置17能够在水平方向和铅垂方向上移动并且能够以铅垂轴为中心转动,使用晶片保持机构在交接部14与清洗单元16之间进行晶片w的输送。关于该基片输送装置17的详细情况,将在后面进行说明。
42.清洗单元16用于对由基片输送装置17输送的晶片w的周缘部进行规定的清洗处理。关于该清洗单元16的详细情况,将在后面进行说明。
43.在本发明中,以沿x轴的方向为前后方向,以x轴正方向为前方向。此外,在本发明中,以送入送出站2和处理站3并排配置的方向(在图中为沿y轴的方向)为左右方向,以设置送入送出站2的一端侧为右侧。而且,在本发明中,以y轴正方向为右方向。
44.此外,基片处理系统1包括控制装置5。该控制装置5例如为计算机,包括控制部6和存储部7。在存储部7中保存用于对基片处理系统1执行的各种处理进行控制的程序。控制部6通过读取并执行存储部7中存储的程序来控制基片处理系统1的动作。
45.也可以是,该程序记录在可由计算机读取的存储介质中,从该存储介质安装至控制装置5的存储部7。作为可由计算机读取的存储介质,例如有硬盘(hd)、软盘(fd)、光盘(cd)、磁光盘(mo)、存储卡等。
46.在如上述那样构成的基片处理系统1中,首先,送入送出站2的基片输送装置13从载置在承载器载置部11中的承载器c取出晶片w,将所取出的晶片w载置到交接部14。被载置在交接部14的晶片w由处理站3的基片输送装置17从交接部14取出,并送入清洗单元16。
47.被送入清洗单元16的晶片w在由清洗单元16处理后,由基片输送装置17从清洗单元16送出,并载置到交接部14。然后,被载置在交接部14的处理完的晶片w由基片输送装置13送回承载器载置部11的承载器c。
48.<清洗单元的结构>
49.下面,参照图2,对实施方式的清洗单元16的结构进行说明。图2是表示实施方式的清洗单元16的具体的结构例的示意图。如图2所示,清洗单元16包括腔室71、基片处理部72、清洗液排出部73和回收皿74。
50.腔室71用于收纳基片处理部72、清洗液排出部73和回收皿74。在腔室71的顶部设置有用于在腔室71内形成下降流的ffu(fan filter unit:风机过滤单元)71a。
51.基片处理部72可转动地保持晶片w,对所保持的晶片w实施液体处理。基片处理部72具有:水平地保持晶片w的保持部72a;在铅垂方向上延伸而支承保持部72a的支柱部件72b;和使支柱部件72b绕铅垂轴转动的驱动部72c。
52.保持部72a与真空泵等吸气装置(未图示)连接,利用通过该吸气装置的吸气产生的负压来吸附晶片w的背面从而水平地保持晶片w。作为保持部72a,例如可以使用多孔吸盘或静电吸盘等。
53.保持部72a具有直径比晶片w的直径小的吸附区域。由此,能够将从后述的清洗液排出部73的下侧喷嘴73b排出的清洗液供给到晶片w的周缘部的背面侧。
54.清洗液排出部73具有上侧喷嘴73a和下侧喷嘴73b。上侧喷嘴73a配置在被保持在基片处理部72的晶片w的上方,下侧喷嘴73b配置在该晶片w的下方。
55.清洗液供给部75与上侧喷嘴73a和下侧喷嘴73b连接。清洗液供给部75从上游侧起
依次具有清洗液供给源75a、阀门75b和流量调节器75c。清洗液供给源75a例如是贮存清洗液的容器(罐)。流量调节器75c用于调节从清洗液供给源75a经由阀门75b向上侧喷嘴73a和下侧喷嘴73b供给的清洗液的流量。
56.上侧喷嘴73a将从清洗液供给部75供给的清洗液向被保持在基片处理部72的晶片w的周缘部的正面侧排出。下侧喷嘴73b将从清洗液供给部75供给的清洗液向被保持在基片处理部72的晶片w的周缘部的背面侧排出。
57.此外,清洗液排出部73具有:用于使上侧喷嘴73a移动的第1移动机构73c;和用于使下侧喷嘴73b移动的第2移动机构73d。通过使用这些第1移动机构73c和第2移动机构73d使上侧喷嘴73a和下侧喷嘴73b移动,能够改变清洗液相对于晶片w的排出位置。
58.回收皿74以包围基片处理部72的方式配置。在回收皿74的底部,形成有:用于将从清洗液排出部73排出的清洗液向腔室71的外部排出的排液口74a;和用于对腔室71内的气氛进行排气的排气口74b。
59.清洗单元16如上述那样构成,在利用保持部72a吸附保持晶片w的背面之后,使用驱动部72c使晶片w转动。
60.接着,清洗单元16从上侧喷嘴73a向转动的晶片w的周缘部的正面侧排出清洗液。此外,与该排出处理并行地,清洗单元16从下侧喷嘴73b向转动的晶片w的周缘部的背面侧排出清洗液。由此,能够对晶片w的周缘部进行清洗处理。
61.<基片输送装置的结构>
62.接着,参照图3~图11对实施方式的基片输送装置17的结构进行说明。图3是实施方式的基片输送装置17的平面图。基片输送装置17具有上下重叠地配置的2个叉形部25(一个未图示)。叉形部25是基片输送部的一个例子。
63.2个叉形部25中的一个叉形部25,用于从模块接受晶片w,另一个叉形部25用于将晶片w交接至模块。
64.叉形部25具有主体部25a和多个爪部26。主体部25a从基部起前端部分成二股,并且向叉形部25的前进方向伸出,形成为将晶片w的侧周包围的马蹄形。多个(在图中为4个)爪部26向马蹄形的主体部25a的内侧突出,支承晶片w的背面。
65.在多个爪部26上,分别形成有用于吸引保持晶片w的背面的吸引孔27。在为了将晶片w交接至模块而使基台24下降时,停止该吸引。
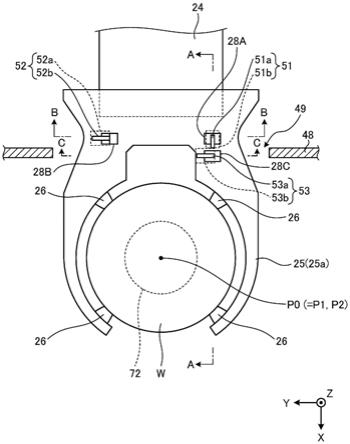
66.此外,在叉形部25的主体部25a的基端侧,设置有3个贯通孔28a、28b、28c。贯通孔28a和贯通孔28b沿与叉形部25的前进方向垂直的方向并排设置。贯通孔28a和贯通孔28c沿叉形部25的前进方向并排设置。
67.晶片检测单元29具有4个发光部31、4个受光部32和支承部33。4个发光部31设置在叉形部25的下方。4个受光部32设置在叉形部25的上方并且分别在4个发光部31的上方。支承部33将4个发光部31和4个受光部32支承在基台24上。
68.1个发光部31与1个受光部32相互成组,构成为1个透射型的光学式传感器。下面,将该发光部31与受光部32的组作为晶片检测用传感器30。
69.属于同一晶片检测用传感器30的发光部31和受光部32,以从上下夹着被保持在位于后退位置的叉形部25上的晶片w的周缘部的方式设置,各组在晶片w的周方向隔开间隔地设置。
70.图4是实施方式的晶片检测单元29的立体图。如图4所示,发光部31以向上方照射光的方式构成,图4中的箭头表示该光路。受光部32由以从晶片w的中心侧向外周侧去的方式呈直线状配置的多个受光元件构成。
71.从发光部31照射的光,一部分由被保持在后退位置的叉形部25上的晶片w的周缘部遮挡,另一部分从晶片w的侧方通过而照射到受光部32。因此,受光部32中被照射光的区域的大小、即接收光的受光元件的数量,与发光部31的正上方的晶片w的周端的位置相应地变化。
72.受光部32将与光的照射区域的大小相应的检测信号发送至控制部6(参照图1)。控制部6基于该检测信号来检测各受光部32的正上方的晶片w的周端的各位置,根据检测出的各位置来计算被保持在叉形部25上的晶片w的中心位置。
73.图5是实施方式的基片输送装置17和清洗单元16的平面图。如图5所示,基片输送装置17具有左右驱动单元21、框架22、升降台23、基台24、2个叉形部25和晶片检测单元29。左右驱动单元21用于使框架22左右水平移动。
74.框架22以包围升降台23的方式立起设置,用于使该升降台23在铅垂方向上升降。基台24设置在升降台23上,通过升降台23绕铅垂轴转动。
75.2个叉形部25以彼此上下重叠的方式设置在基台24上,基台24使这些叉形部25各自独立地在基台24上的后退位置与前进位置之间进退移动。
76.为了能够这样使各部移动,左右驱动单元21、框架22、升降台23和基台24包括由电动机、正时皮带和滑轮构成的驱动机构(未图示)。该电动机包括编码器,以使得控制部6(参照图1)能够检测各部的位置。
77.此外,如图5所示,清洗单元16包括上述的基片处理部72和回收皿74。另外,在基片处理部72设置有升降销76。
78.该升降销76是设置在回收皿74的内侧的可升降的3个升降销。升降销76在位于回收皿74上的叉形部25与基片处理部72之间交接晶片w。
79.清洗单元16具有将清洗单元16与输送部15分隔的垂直的壁部48。利用该壁部48,能够抑制在清洗单元16的内部进行的处理受到输送部15中的气流的影响。
80.在壁部48上,设置有用于将晶片w送入送出基片处理部72的送入口49。此外,在送入口49的附近,设置有作为透射型的光学式传感器的第1检测部51、第2检测部52和第3检测部53。
81.第1检测部51和第2检测部52以从输送部15向清洗单元16看时第1检测部51成为左侧的方式沿左右方向并排设置。第1检测部51和第3检测部53以第1检测部51成为后方侧的方式沿前后方向并排设置。即,第3检测部53设置在比第1检测部51和第2检测部52靠清洗单元16的内侧或外侧(在图中为内侧)的位置。
82.图6是表示实施方式的第1检测部51、第2检测部52和第3检测部53的平面图。在图6中还表示出了为了送入晶片w并将晶片w交接至基片处理部72,经由送入口49向前方向进入清洗单元16内的叉形部25。
83.如图6所示,第1检测部51具有在上下方向上并排配置的发光部51a和受光部51b。发光部51a与送入口49相比设置在下方,受光部51b与送入口49相比设置在上方。
84.发光部51a向上方照射光。受光部51b具有多个(例如1024个)受光元件,该多个受
光元件沿前后方向(x轴方向)并排配置。
85.第2检测部52具有在上下方向上并排配置的发光部52a和受光部52b。发光部52a与送入口49相比设置在下方,受光部52b与送入口49相比设置在上方。
86.发光部52a向上方照射光。受光部52b具有多个(例如1024个)受光元件,该多个受光元件沿左右方向(y轴方向)并排配置。
87.第3检测部53具有在上下方向上并排配置的发光部53a和受光部53b。发光部53a与送入口49相比设置在下方,受光部53b与送入口49相比设置在上方。
88.发光部53a向上方照射光。受光部53b具有多个(例如1024个)受光元件,该多个受光元件沿左右方向(y轴方向)并排配置。
89.图7是图6所示的a
‑
a线的箭头向截面图,是用于对第1检测部51的动作进行说明的图。在图7中,用箭头示意性地表示由发光部51a形成的光路。
90.如图7所示,发光部51a配置成:向为了交接晶片w而在基片处理部72(参照图5)的上方行进的叉形部25的贯通孔28a和该贯通孔28a的前方侧(x轴正方向侧)的边缘部28aa照射光。
91.在第1检测部51中,受光部51b接收光的区域的大小与贯通孔28a的前方侧的边缘部28aa的位置相应地变化。因此,受光部51b向控制部6输出与该受光区域的大小相应的信号。
92.控制部6能够基于该输出信号,检测贯通孔28a的前方侧的边缘部28aa(下面,也简称为贯通孔28a的边缘部28aa)的x轴方向的位置。即,第1检测部51能够检测行进方向上的叉形部25相对于基片处理部72的位置。
93.图8是图6所示的b
‑
b线的箭头向截面图,是用于对第2检测部52的动作进行说明的图。在图8中,用箭头示意性地表示由发光部52a形成的光路。
94.如图8所示,发光部52a配置成:向为了交接晶片w而在基片处理部72(参照图5)的上方行进的叉形部25的贯通孔28b和该贯通孔28b的右侧(y轴正方向侧)的边缘部28ba照射光。
95.在第2检测部52中,受光部52b接收光的区域的大小与贯通孔28b的右侧的边缘部28ba的位置相应地变化。因此,受光部52b向控制部6输出与该受光区域的大小相应的信号。
96.控制部6能够基于该输出信号,检测贯通孔28b的右侧的边缘部28ba(下面,也简称为贯通孔28b的边缘部28ba)的y轴方向的位置。即,第2检测部52能够检测与行进方向垂直的方向上的叉形部25相对于基片处理部72的位置。
97.如以上说明的那样,第1检测部51和第2检测部52能够检测彼此正交的2个水平轴上的叉形部25相对于基片处理部72的位置。
98.图9是图6所示的c
‑
c线的箭头向截面图,是用于对第3检测部53的动作进行说明的图。在图9中,用箭头示意性地表示由发光部53a形成的光路。
99.如图9所示,发光部53a配置:向为了交接晶片w而在基片处理部72(参照图5)的上方行进的叉形部25的贯通孔28c和该贯通孔28c的右侧(y轴正方向侧)的边缘部28ca照射光。
100.在第3检测部53中,受光部53b接收光的区域的大小与贯通孔28c的右侧的边缘部28ca的位置相应地变化。因此,受光部53b向控制部6输出与该受光区域的大小相应的信号。
101.控制部6能够基于该输出信号,检测贯通孔28c的右侧的边缘部28ca(下面,也简称为贯通孔28c的边缘部28ca)的y轴方向的位置。即,第3检测部53能够检测与行进方向垂直的方向上的叉形部25相对于基片处理部72的位置。
102.在此,实施方式的第3检测部53能够通过与第2检测部52协作,检测叉形部25的转动轴相对于基片处理部72的倾斜度。参照图10和图11,对该转动轴的倾斜度检测处理的详细情况进行说明。
103.图10和图11是用于对实施方式的倾斜度检测处理进行说明的图。在图10和图11中,为了使得容易理解,将第2检测部52和第3检测部53上下并排地表示。
104.图10表示叉形部25(参照图6)的转动轴相对于基片处理部72(参照图6)不倾斜的情况(即,倾斜角度为0(rad))。如图10所示,第2检测部52能够基于受光部52b的受光区域的大小,求出贯通孔28b的边缘部28ba与受光部52b的端部52ba的距离ya。
105.同样,第3检测部53能够基于受光部53b的受光区域的大小,求出贯通孔28c的边缘部28ca与受光部53b的端部53ba的距离yb。
106.在此,因为受光部52b和受光部53b沿y轴方向配置,所以上述的距离ya和距离yb是y轴方向上的边缘部28ba(28ca)与端部52ba(53ba)的距离。此外,设受光部52b与受光部53b的x轴方向上的距离为距离xa。
107.例如,在实施方式中,在叉形部25的转动轴相对于基片处理部72不倾斜的情况下,如图10所示的那样,以使得距离ya与距离yb相等的方式,配置第2检测部52、第3检测部53和贯通孔28b、28c。
108.图11表示叉形部25(参照图6)的转动轴相对于基片处理部72(参照图6)倾斜的情况。如图11所示,在叉形部25的转动轴倾斜的情况下,设置在该叉形部25的贯通孔28b与贯通孔28c的位置关系改变,因此,距离ya和距离yb成为彼此不同的值。
109.而且,叉形部25的转动轴相对于基片处理部72的倾斜角度θ(rad)如图11也表示的那样,可以利用下面的式(1)计算。
110.θ=tan
‑1((ya
‑
yb)/xa)
ꢀꢀꢀ……
(1)
111.如以上说明的那样,实施方式的第3检测部53能够通过与第2检测部52协作,求出叉形部25的转动轴相对于基片处理部72的倾斜角度θ。
112.<晶片的送入处理>
113.接着,参照之前说明的图6等,对使用基片输送装置17将晶片w送入清洗单元16的基片处理部72的处理的详细情况进行说明。
114.用于向基片处理部72交接晶片w的叉形部25的位置被预先设定,将该设定位置作为交接起始位置。更详细而言,作为交接起始位置,对基台24上的叉形部25的前进位置和叉形部25的朝向进行预先设定。
115.换言之,对从使叉形部25进退的基台24、叉形部25和升降台23(参照图5)中分别包含的电动机中所设置的编码器分别输出的脉冲数(编码器值)进行预先设定。将这样预先设定的基台24上的叉形部25的位置和叉形部25的朝向分别设为“前进设定位置”、“设定朝向”。
116.在晶片w在叉形部25上被保持在规定的基准保持位置,并且叉形部25位于该交接起始位置的情况下,在基片处理部72上晶片w的中心位于该基片处理部72的转动轴上。在图
6中,表示出了叉形部25、晶片w这样分别位于交接起始位置、基准位置的状态。
117.在下面的图中,将被保持在基准保持位置的情况下的晶片w的中心点表示为p0,将实际被保持的晶片w的中心点表示为p1,将基片处理部72的转动轴表示为p2。叉形部25的朝向是指从叉形部25的转动轴看的中心点p0的朝向。
118.例如,在晶片w偏离基准保持位置地被保持在叉形部25上的情况下,在将晶片w向基片处理部72交接时,控制部6为了对该偏差进行补偿,以使叉形部25从前进设定位置和设定朝向偏离的方式使叉形部25移动。
119.即,控制部6计算从预先设定的编码器值修正与晶片w的偏离对应的量之后的编码器值,叉形部25与该修正后的编码器值相应地移动。在本发明中,设该叉形部25移动后的位置为交接的暂定位置。
120.接着,控制部6控制基片输送装置17,使保持晶片w的叉形部25向前方向(x轴正方向)移动,将晶片w送入清洗单元16内的基片处理部72的上方。
121.接着,第1检测部51检测设置在叉形部25上的贯通孔28a的边缘部28aa的位置,第2检测部52检测贯通孔28b的边缘部28ba的位置,第3检测部53检测贯通孔28c的边缘部28ca的位置。
122.接着,控制部6求取检测出的边缘部28aa、28ba的位置与加进了将叉形部25从交接起始位置修正为交接的暂定位置后的、应该检测出边缘部28aa、28ba的位置的偏差。
123.即,控制部6检测所设定的交接的暂定位置与实际的叉形部25的位置的位置偏差。
124.接着,控制部6以消除该位置偏差的方式,将叉形部25的朝向从设定朝向进一步进行修正,并且将基台24上的叉形部25的位置从前进设定位置进一步进行修正。
125.即,控制部6以将从各编码器输出的编码器值从预先设定的编码器值进一步修正与叉形部25的位置偏差相应的量的方式使叉形部25移动。然后,在使晶片w的中心点p1位于基片处理部72的转动轴p2上的状态下,进行晶片w的交接。
126.在上面说明的对叉形部25的位置偏差进行修正的处理中,仅参照叉形部25相对于基片处理部72的、x轴方向的位置和y轴方向的位置,并视为叉形部25相对于基片处理部72的朝向没有偏离来实施处理。
127.在这样的情况下,修正的精度会与叉形部25的朝向的偏离量相应地降低。这是因为,控制部6通过使叉形部25转动来进行y轴方向的位置的修正,而在叉形部25的朝向偏离了的情况下,y轴方向的位置的修正会不足,而且x轴方向的位置会不按预期而偏离。
128.但是,在实施方式中,在清洗单元16设置有第3检测部53,因此,在对叉形部25的位置偏差进行修正的处理中,能够还参照叉形部25的朝向(倾斜角度θ)来对叉形部25的位置偏差进行修正。
129.因此,根据实施方式,能够提高在清洗单元16内的基片处理部72载置晶片w时的定心精度。
130.作为叉形部25的位置偏差的原因,例如可以列举,由于在基片输送装置17的基台24水平移动的期间该基台24转动,该水平移动因惯性而受到影响。在实施方式中,能够如以上说明的那样对叉形部25的位置偏差进行修正,因此,能够抑制由上述的原因引起的晶片w的交接的异常的发生。
131.<晶片的输送处理>
132.接着,参照图12~图14对晶片w向清洗单元16的送入处理的详细情况进行说明。图12~图14是用于说明实施方式的晶片w的送入处理的图。
133.在图12,为了使得容易理解,在虚线的箭头的前头放大表示包含晶片w的中心点p0、p1在内的区域。此外,将在叉形部25的交接起始位置检测出的贯通孔28a的边缘部28aa的位置、贯通孔28b的边缘部28ba的位置分别作为边缘部28aa、28ba的基准位置。
134.首先,控制部6使基台24位于交接部14的跟前,在叉形部25位于前进位置的状态下使基台24上升,将晶片w从交接部14交接至叉形部25进行保持。然后,控制部6使叉形部25移动至后退位置。
135.接着,控制部6基于来自各晶片检测用传感器30的检测信号,计算晶片w的中心点p1的位置,检测该中心点p1与保持在上述的基准保持位置的晶片w的中心点p0的偏离量。
136.控制部6计算沿连结叉形部25的转动中心与中心点p1的第一直线l1的水平方向的偏离量δx1、和沿与该第一直线l1正交的第二直线l2的水平方向的偏离量δy1,作为具体的偏离量。由此,能够检测叉形部25的晶片w的位置。
137.接着,控制部6通过基片输送装置17的左右驱动单元21,使框架22移动至规定的位置。即,控制部6以从左右驱动单元21的电动机输出规定的编码器值的方式使框架22移动。另外,在该框架22移动的同时,控制部6使叉形部25向设定朝向转动。
138.接着,控制部6为了向基片处理部72上送入晶片w,控制基片输送装置17,进行叉形部25的前进和叉形部25的转动。在实施方式中,该叉形部25的前进和叉形部25的转动例如并行地进行。
139.此时,控制部6以使得叉形部25位于从前进设定位置偏移与偏离量δx1对应的量的位置的方式实施叉形部25的前进处理。同样,控制部6以使得叉形部25从设定朝向偏移与偏离量δy1对应的量的朝向的方式实施叉形部25的转动处理。
140.即,在实施方式中,如图13所示的那样,以对偏离量δx1、δy1进行修正使得晶片w的中心点p1与基片处理部72的转动轴p2对齐的方式,使叉形部25移动至上述的交接的暂定位置并静止。
141.接着,控制部6控制第1检测部51、第2检测部52和第3检测部53,检测叉形部25的贯通孔28a的边缘部28aa、贯通孔28b的边缘部28ba和贯通孔28c的边缘部28ca的位置。
142.此外,对于贯通孔28a的边缘部28aa的基准位置,修正与偏离量δx1对应的量,作为对于贯通孔28a的边缘部28aa应该检测的位置而取得。
143.同样,对于贯通孔28b的边缘部28ba的基准位置,修正从设定朝向改变叉形部25的朝向后的量,即与偏离量δy1对应的量,作为对于贯通孔28b的边缘部28ba应该检测的位置而取得。
144.然后,控制部6对于贯通孔28a,计算应该检测的位置与检测出的位置的偏离量(下面记为δx2),并且,对于通孔28b,计算应该检测的位置与检测出的位置的偏离量(下面记为δy2)。该偏离量δx2、δy2在图中未示出。
145.在此,在实施方式中,控制部6在该偏离量δx2、δy2的计算处理之前,基于检测出的贯通孔28b的边缘部28ba和贯通孔28c的边缘部28ca的位置,计算叉形部25的转动轴相对于基片处理部72的倾斜角度θ。
146.控制部6在偏离量δx2、δy2的计算处理时,作为参数使用相对于基片处理部72的
叉形部25的转动轴的倾斜角度θ,进行偏离量δx2、δy2的计算处理。由此,能够提高偏离量δx2、δy2的计算精度。
147.因此,根据实施方式,能够提高向清洗单元16内的基片处理部72载置晶片w时的定心精度。
148.接着,控制部6控制基片输送装置17,例如并行地进行与δx2对应的量的叉形部25的进退和与δy2对应的量的叉形部25的转动。由此,控制部6能够以使得晶片w的中心点p1位于基片处理部72的转动轴p2上的方式使叉形部25移动。
149.即,控制部6能够如图14所示的那样,使叉形部25从上述的交接的暂定位置,向基于该暂定位置和偏离量δx2、δy2新设定的晶片w的交接位置移动。
150.接着,控制部6通过使清洗单元16的升降销76上升,从叉形部25向该升降销76交接晶片w。然后,控制部6依次进行叉形部25的后退、升降销76的下降,由此将晶片w交接至基片处理部72。
151.另外,虽然在上述的说明中省略了,但是在一个叉形部25进行晶片w的送入处理之前或同时,另一个叉形部25进行保持在基片处理部72的晶片w的送出处理。
152.此外,交接起始位置和基准保持位置等,进行以上说明的叉形部25的位置的修正所需的数据预先储存在控制装置5的存储部7,基于该数据进行叉形部25的动作的控制。
153.如以上说明的那样,在实施方式中,能够以使得晶片w的中心点p1与基片处理部72的转动轴p2对齐的方式输送晶片w。由此,在清洗单元16,例如将晶片w的周缘部的膜除去的情况下,能够防止被除去的宽度偏离设定值,因此能够提高晶片w的成品率。
154.而且,在实施方式中,不仅设置有第1检测部51和第2检测部52,而且还设置有第3检测部53,因此,能够还参照叉形部25的朝向(倾斜角度θ)来修正叉形部25的位置偏差。因此,根据实施方式,能够提高将晶片w载置在基片处理部72时的定心精度。
155.此外,在实施方式中,除了第2检测部52以外,第3检测部53也能够检测与行进方向垂直的方向(即,y轴方向)上的叉形部25相对于基片处理部72的位置。
156.由此,即使在第2检测部52产生问题的情况下,也能够利用第3检测部53进行使用该第2检测部52进行的处理。因此,根据实施方式,能够提高基片处理系统1的可靠性。
157.此外,在实施方式中,第3检测部53以相对于第2检测部52不沿y轴方向排列的方式配置即可。由此,能够在叉形部25的转动轴倾斜的情况下,使由第2检测部52测定的距离ya(参照图11)与由第3检测部53测定的距离yb(参照图11)为彼此不同的值。
158.因此,根据实施方式,能够高精度地求出叉形部25的转动轴相对于基片处理部72的倾斜角度θ。
159.此外,在实施方式中,第1检测部51和第2检测部52与送入口49相邻地设置,第3检测部53相对于基片处理部72设置在比第1检测部51和第2检测部52靠内侧或外侧的位置。
160.由此,能够不妨碍送入处理地测定将晶片w向基片处理部72进行送入处理时的叉形部25的位置和倾斜角度θ。因此,根据实施方式,能够将晶片w顺畅地送入基片处理部72。
161.此外,在实施方式中,第1检测部51~第3检测部53均为具有发光部51a~53a和受光部51b~53b的光学式传感器。而且,在实施方式中,在检测叉形部25的位置时,使得发光部51a~53a和受光部51b~53b隔着设置在叉形部25上的贯通孔28a~28c配置即可。
162.由此,能够不妨碍送入处理并且高精度地测定将晶片w向基片处理部72进行送入
处理时的叉形部25的位置和倾斜角度θ。因此,根据实施方式,能够将晶片w顺畅并且高精度地送入基片处理部72。
163.此外,在实施方式中,在叉形部25分别设置有与第1检测部51~第3检测部53对应的贯通孔28a~28c即可。由此,能够提高在清洗单元16设置第1检测部51~第3检测部53时的配置的自由度和在叉形部25设置贯通孔28a~28c时的配置的自由度。
164.另外,在实施方式中,并不限定于在叉形部25分别设置与第1检测部51~第3检测部53对应的贯通孔28a~28c的情况。图15是表示实施方式的变形例1的第1检测部51、第2检测部52、第3检测部53和叉形部25的平面图。
165.如图15所示,在变形例1中,与实施方式同样,在与第1检测部51对应的位置设置有贯通孔28a,在与第2检测部52对应的位置设置有贯通孔28b。另一方面,在变形例1中,第3检测部53以向与第2检测部52共用的贯通孔28b的边缘部28ba照射光的方式配置。
166.在这样的情况下,也能够通过使用第1检测部51~第3检测部53,测定叉形部25相对于基片处理部72的x轴方向的位置、y轴方向的位置和倾斜角度θ。
167.图16是表示实施方式的变形例2的第1检测部51、第2检测部52、第3检测部53和叉形部25的平面图。如图16所示,在变形例2中,在叉形部25设置有第1检测部51~第3检测部53共用的贯通孔28。
168.在变形例2中,第1检测部51以向沿着贯通孔28的y轴方向的边缘部28a照射光的方式配置,第2检测部52和第3检测部53以向沿着贯通孔28的x轴方向的边缘部28b照射光的方式配置。
169.在这样的情况下,也能够通过使用第1检测部51~第3检测部53,测定叉形部25相对于基片处理部72的x轴方向的位置、y轴方向的位置和倾斜角度θ。
170.另外,在上述的实施方式中,第1检测部51~第3检测部53并不限定于具有发光部51a~53a和受光部51b~53b的光学式传感器。例如,也可以使用ccd(charge coupled device:电荷耦合器件)传感器和cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)传感器等,检测贯通孔28a~28c的边缘部28aa~28ca的位置。
171.此外,在上述的实施方式中,第1检测部51~第3检测部53检测的对象并不限定于贯通孔28a~28c的边缘部28aa~28ca,只要是用于检测叉形部25的位置的标记就可以为任意的对象。
172.此外,在上述的实施方式中,通过使叉形部25转动进行y轴方向上的偏差的修正,不过也可以通过使基片输送装置17的框架22在y轴方向上移动而使叉形部25的y轴方向的位置偏移来进行。
173.实施方式的基片处理装置(基片处理系统1)包括基片处理部72、基片输送部(叉形部25)、第1检测部51、第2检测部52和第3检测部53。基片处理部72保持基片(晶片w)并对其进行处理。基片输送部(叉形部25)具有转动轴,向基片处理部72送入基片(晶片w)。第1检测部51在沿着行进方向(x轴方向)将基片(晶片w)送入基片处理部72时,检测行进方向(x轴方向)上的基片输送部(叉形部25)相对于基片处理部72的位置。第2检测部52检测与行进方向垂直的方向(y轴方向)上的基片输送部(叉形部25)相对于基片处理部72的位置。第3检测部53检测基片输送部(叉形部25)的转动轴相对于基片处理部72的倾斜度。由此,能够提高将晶片w载置在基片处理部72时的定心精度。
174.此外,在实施方式的基片处理装置(基片处理系统1)中,第3检测部53以相对于第2检测部52不沿着与行进方向垂直的方向(y轴方向)排列的方式配置。由此,能够高精度地求出叉形部25的转动轴相对于基片处理部72的倾斜角度θ。
175.此外,在实施方式的基片处理装置(基片处理系统1)中,第1检测部51和第2检测部52与基片处理部72的送入口49相邻地设置。此外,第3检测部53相对于基片处理部72设置在比第1检测部51和第2检测部52靠内侧或外侧的位置。由此,能够将晶片w顺畅地送入基片处理部72。
176.此外,在实施方式的基片处理装置(基片处理系统1)中,第1检测部51、第2检测部52和第3检测部53均为具有发光部51a~53a和受光部51b~53b的光学式传感器。此外,在检测基片输送部(叉形部25)的位置时,发光部51a~53a和受光部51b~53b隔着设置在基片输送部(叉形部25)上的贯通孔28a~28c配置。由此,能够将晶片w顺畅并且高精度地送入基片处理部72。
177.此外,在实施方式的基片处理装置(基片处理系统1)中,贯通孔28a~28c在与第1检测部51、第2检测部52和第3检测部53对应的位置设置有多个。由此,能够提高在清洗单元16设置第1检测部51~第3检测部53时的配置的自由度和在叉形部25设置贯通孔28a~28c时的配置的自由度。
178.<处理的顺序>
179.接着,参照图17说明实施方式的送入处理的顺序。图17是表示实施方式的基片处理系统1执行的送入处理的顺序的流程图。
180.首先,控制部6控制晶片检测用传感器30,检测晶片w相对于叉形部25的位置偏差(步骤s101)。然后,控制部6控制基片输送装置17,使保持有晶片w的叉形部25向前方向移动,将晶片w送入清洗单元16内的基片处理部72(步骤s102)。
181.接着,控制部6控制第1检测部51~第3检测部53,检测叉形部25相对于基片处理部72的位置(x轴方向的位置和y轴方向的位置)和倾斜角度θ(步骤s103)。然后,控制部6基于由第1检测部51~第3检测部53检测出的各检测值,计算对基准位置的修正量(步骤s104)。
182.接着,控制部6基于计算出的修正量使基片输送装置17动作,对叉形部25相对于基片处理部72的位置进行修正(步骤s105)。然后,控制部6控制第1检测部51~第3检测部53,检测叉形部25相对于基片处理部72的位置(x轴方向的位置和y轴方向的位置)和倾斜角度θ(步骤s106)。
183.接着,控制部6基于由第1检测部51和第2检测部52检测出的叉形部25的位置(x轴方向的位置和y轴方向的位置),判断叉形部25的位置偏差是否在规定的范围内(步骤s107)。
184.在此,在叉形部25的位置偏差在规定的范围内的情况下(步骤s107为“是”),控制部6控制叉形部25和清洗单元16,将晶片w载置在基片处理部72(步骤s108),完成处理。
185.另一方面,在叉形部25的位置偏差不在规定的范围内的情况下(步骤s107中为“否”),返回步骤s104的处理。
186.实施方式的基片处理方法包括检测步骤(步骤s103)、计算步骤(步骤s104)和修正步骤(步骤s105)。检测步骤(步骤s103)中,在使用具有转动轴的基片输送部(叉形部25),沿着行进方向(x轴方向)将基片(晶片w)送入基片处理部72时,检测行进方向上的基片输送部
相对于基片处理部的位置、与行进方向垂直的方向(y轴方向)上的基片输送部相对于基片处理部的位置、和基片输送部的转动轴相对于基片处理部的倾斜度。计算步骤(步骤s104)基于在检测步骤(步骤s103)中检测出的各检测值,计算对基准位置的修正量。修正步骤(步骤s105)基于在计算步骤(步骤s104)中计算出的修正量,对行进方向上的基片输送部(叉形部25)相对于基片处理部72的位置、和与行进方向垂直的方向上的基片输送部相对于基片处理部的位置进行修正。由此,能够提高将晶片w载置在基片处理部72时的定心精度。
187.上面,对本发明的实施方式进行了说明,但是本发明并不限定于上述的实施方式,可以在不脱离其主旨的范围内进行各种变更。
188.本次公开的实施方式在所有方面均为例示而不应认为是限制性。实际上,上述的实施方式可以以多种方式具体实现。此外,上述的实施方式在不脱离所附的权利要求书及其主旨的情况下可以以各种方式省略、替换、改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。