1.本发明涉及埋地管道位置的探测方法,尤其涉及一种埋地管道的探测方法以及系统。
背景技术:
2.pe燃气管由于其低廉的造价,良好的抗腐蚀、康衰老等性能,在燃气管网建设中被普遍使用。由于城市中越来越多的pe燃气管道采用非开挖顶管技术进行铺设,或因城市建设在原来直埋的燃气管道上加厚了覆土层,使得管道埋深超过了3米以上,同时早期采用非开挖定向钻铺设的管道,由于历史原因图纸资料不齐全不准确,当新建管道进行施工作业时,给现有燃气管道安全运营管理带来巨大挑战。所以需要对待施工位置的现有pe燃气管进行定位。现有的管道定位方法:
3.1、采用常规重磁电震等物理方法来进行定位,但该方法定位精度不高,误差较大。
4.2、采用声波探测技术,但该方法靠人耳识别声波强度、无法远距离识别以及结合经验判断,该方法无法将声波强度数字化,具有主观判断性,不便于普及。
5.基于现有方法中存在的精度差、依赖检测人员的经验的缺陷,本发明旨在提供一种埋地管道的探测方法以及系统解决上述问题。
技术实现要素:
6.本发明提供了一种埋地管道的探测方法以及系统,其不依赖检测人员的经验,便于推广普及,且可以精确定位管道在地下的坐标。
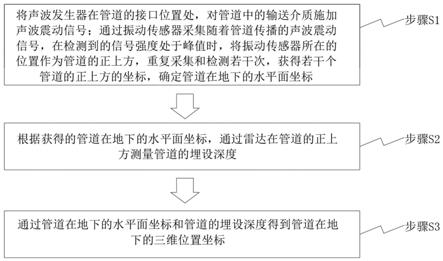
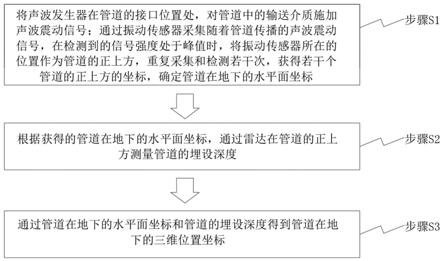
7.其技术方案是这样的:一种埋地管道的探测方法,其特征在于,包括以下步骤:
8.步骤s1:将声波发生器在管道的接口位置处,对管道中的输送介质施加声波震动信号;通过振动传感器采集随着管道传播的声波震动信号,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标;
9.步骤s2:根据获得的管道在地下的水平面坐标,通过雷达在管道的正上方测量管道的埋设深度;
10.步骤s3:通过管道在地下的水平面坐标和管道的埋设深度得到管道在地下的三维位置坐标。
11.进一步的,在步骤s1中具体包括以下步骤:
12.s101:将声波发生器在管道的接口位置处,对管道中的输送介质施加固定频率的声波震动信号;
13.s102:从声波发生器所在接口位置出发,每间隔设定的采样距离设置一个采样位置,在采样位置附近的在不同位置处,振动传感器分别采集随着管道传播的固定频率的声波震动信号,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方;
14.s103:重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标。
15.进一步的,a、fft变换:通过快速傅里叶变换,将采集的信号数据,从时域信号转换为频域信号;
16.b、去除直流分量:对于频域信号数据,先进行累加求和然后在取平均值,然后在通过获取原始值减去平均值,获取零值的位置,通过零值漂移的方式去直流分量;
17.c、带通滤波:通过带通滤波,过滤设定的固定频率范围以外的频域信号数据;
18.d、剔除异常数据:对n组带通滤波后的信号数据先求和再求平均值,然后将每组信号数据除以n组信号数据的平均值获得比例数据,判断比例数据是否大于设定的比例系数,若大于,则删除对应的信号数据,若小于,则保留;
19.e、频域叠加:对每组剔除异常数据后留下的频谱信号数据进行频域叠加,获得有效的频域信号数据。
20.进一步的,通过步骤e获得有效的频域信号数据,寻找频域信号数据的第一峰尖maxv1和第二峰尖maxv2,当满足:
21.(maxv1
‑
maxv2)/maxv2>maxg
22.其中,maxg为设定的比例系数;并且通同时满足:第一峰尖maxv1和第二峰尖maxv2对应的频率在指定的频域范围内,则认为第一峰尖为检测到的信号强度的峰值,否则,重新寻找第一峰尖和第二峰尖。
23.进一步的,在步骤s101中,声波发生器发出两个频率不同的固定频率的声波震动信号。
24.进一步的,在步骤s102中,振动传感器同时检测两个频率不同的固定频率的声波震动信号,当检测到的两个声波震动信号的信号强度均处于峰值时,将此刻振动传感器所在的位置作为管道的正上方。
25.进一步的,所述声波震动信号为方波或者正弦波中的任意一种。
26.一种埋地管道的探测系统,包括通讯连接的:
27.声波发生器,所述声波发生器设置在管道的接口位置处,用于对管道中的输送介质施加声波震动信号;
28.振动传感器,用于采集随着管道传播的声波震动信号;
29.控制终端,所述控制终端接收来自振动传感器采集的声波震动信号,显示声波震动信号的信号强度,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,通过多次采集和检测,确定管道在地下的水平面坐标;
30.雷达,用于在获得管道在地下的水平面坐标后测量管道的埋设深度。
31.进一步的,所述管道的接口包括放散阀、调压箱、管道井。
32.进一步的,所述控制终端与所述振动传感器通讯的方式包括wifi、2g、3g、4g、5g网络中的任意一种,所述控制终端为手机或者平板电脑。
33.进一步的,所述振动传感器还包括gps模块,所述gps模块采用差分gps设备,所述差分gps设备包括设置在所述振动传感器上的移动站,所述差分gps设备还包括基准站,所述移动站能够定位管道的地理位置,所述基准站实时的记录gps定位信息,通过与地面已知控制点的实际坐标值做比对处理,以解算得到移动站的修正量,以此对移动站的测量的管
道的地理位置进行修正。
34.采用本发明的埋地管道的探测方法,通过声波发生器,对燃气管道中的燃气施加特定频率的声波震动信号,声波震动信号在燃气管道中顺着燃气向前传输,顺着燃气管道向前传输的过程中也会带动燃气管道的振动,燃气管道振动再带动埋设管道的土壤的振动,土壤振动再带动地面振动,然后通过振动传感器来检测这种声波震动信号,声波发生器发射的是固定频率的声波震动信号,振动传感器探测时也只探测这个固定频率范围内的频率范围,滤除其它频率,包括外界的大部分振动,从而不会收到干扰,在远端用振动传感器在地面上采集声波震动信号的强弱,根据声波震动信号的特性和强弱来定位管道的位置,以此可探测出平面位置,结合现有雷达技术,可判读出管道埋深,采用本发明的埋地管道的探测方法,进行多次进行采集和检测,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,这种探测方案不怕干扰,不会测错测偏,采用本发明的方案可精确定位管道的三维空间,同时对于检测到的信号强度结果都是直观展示的,不依赖检测人员的经验,便于推广普及。
附图说明
35.图1为本发明的埋地管道的探测方法的主要流程示意图;
36.图2为本发明的埋地管道的探测系统的系统组成框图;
37.图3为本发明的控制终端展示的信号强度的图;
38.图4为本发明的差分gps设备的定位的原理图。
具体实施方式
39.实施例1:
40.见图1,本发明的一种埋地管道的探测方法,包括以下步骤:
41.步骤s1:将声波发生器在管道的接口位置处,对管道中的输送介质施加声波震动信号;通过振动传感器采集随着管道传播的声波震动信号,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标;
42.步骤s2:根据获得的管道在地下的水平面坐标,通过雷达在管道的正上方测量管道的埋设深度;
43.步骤s3:通过管道在地下的水平面坐标和管道的埋设深度得到管道在地下的三维位置坐标。
44.在本发明的实施例中,将燃气管道中为探测的管道,燃气管道中的输送介质为气体,通常,燃气管道会在地面设置接口,这些接口可能包括放散阀、调压箱、燃气管道井,在本实施例中可以在找到的任意接口位置处设置声波发生器,声波发生器管道中的输送介质施加声波震动信号,由于燃气管道内充满燃气,声波震动信号会通过燃气介质沿着管道传输。声波震动信号在燃气管道传输过程中,也会通过燃气管道向四周传输,传输到燃气管道的外面的土壤、碎石、沙土等地底环境中,再传输到地面;
45.然后通过振动传感器采集随着管道传播的声波震动信号,当检测到的信号强度处于峰值时,我们认为此时所在的位置作为管道的正上方,即已经找到了管道的位置,确定管
道的一个点后,重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标,然后通过雷达在管道的正上方测量管道的埋设深度,结合水平面坐标,可以得到管道在地下的三维位置坐标。
46.实施例2:
47.在本发明的实施例中,还提供了一个更详尽的埋地管道的探测方法,具体而言,在步骤s1中包括以下步骤:
48.s101:将声波发生器在管道的接口位置处,对管道中的输送介质施加固定频率的声波震动信号,在本实施例中,声波震动信号为500hz的正弦波信号;
49.s102:从声波发生器所在接口位置出发,每间隔设定的采样距离设置一个采样位置,在采样位置附近的在不同位置处,振动传感器分别采集随着管道传播的固定频率的声波震动信号,振动传感器对于采集到的信号数据,进行以下处理:
50.a、fft变换:通过快速傅里叶变换,将采集的信号数据,从时域信号转换为频域信号,本实施例中采用快速傅里叶变换进行频率变化,相比于dft变换,计算复杂度更低,数据更加精确;
51.b、去除直流分量:对于频域信号数据,先进行累加求和然后在取平均值,然后在通过获取原始值减去平均值,获取零值的位置,通过零值漂移的方式去直流分量;
52.c、带通滤波:通过带通滤波,过滤设定的固定频率范围以外的频域信号数据;在本实施例中,通过带通滤波过滤低于494hz、高于506hz的信号。带通滤波允许特定频率信号通过的滤波器,降低或消除该频带上下频率的信号,它是由高通和低通滤波器协同作用的结果,高通和低通滤波器的截止频率可作为通带的下限频率和上限频率。
53.d、剔除异常数据:对n组带通滤波后的信号数据先求和再求平均值,然后将每组信号数据除以n组信号数据的平均值获得比例数据,判断比例数据是否大于设定的比例系数,若大于,则删除对应的信号数据,若小于,则保留;这里是为了防止传感器在探测的过程中出现误报的情况,将无效数据剔除完,方便后面数据处理;
54.e、频域叠加:对每组剔除异常数据后留下的频谱信号数据进行频域叠加,获得有效的频域信号数据。
55.通过步骤e获得有效的频域信号数据,寻找频域信号数据的第一峰尖maxv1和第二峰尖maxv2,当满足:
56.(maxv1
‑
maxv2)/maxv2>maxg
57.其中,maxg为设定的比例系数;并且通同时满足:第一峰尖maxv1和第二峰尖maxv2对应的频率在指定的频域范围内,则认为第一峰尖为检测到的信号强度的峰值,否则,重新寻找第一峰尖和第二峰尖。
58.在步骤s102中,进行去除直流分量来消除直流偏置影响,进行带通滤波过滤固定频率以过滤设定的固定频率以外的声波震动信号,然后通过快速傅里叶变换求得频谱,再把频谱多次叠加,获得有效的声波震动信号,通过观测有效的声波震动信号,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,从而确定管道在地下的一个水平面坐标;
59.s103:重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标。
60.步骤s2:根据获得的管道在地下的水平面坐标,通过雷达在管道的正上方测量管道的埋设深度;
61.步骤s3:通过管道在地下的水平面坐标和管道的埋设深度得到管道在地下的三维位置坐标。
62.在本实施例中,信号发生器发射的是固定频率,探测器探测时也只探测这个固定频率范围内的频率范围,以此确保探测的可靠性。
63.当探测管道信号当探测位置离信号源比较远时,比如超过400米,信号源通过400米的传输再通过地下结构传输到地面,信号已经非常微弱了,而且加入了很多噪声信号。这就需要对信号进行带通滤波,把高频和低频的信号滤除掉,只保留设定的固定频率附近的信号,由于干扰信号也已经很大了,有可能超过信号源的信号,但干扰信号毕竟是干扰信号,不可能每次都很大,但信号源的信号确实固定的,所以先对信号先去除直流分量,再进行带通滤波后做fft频率转换,然后把多次的频域信号进行叠加,振动源的有效性信号就会不断叠加而凸显出来。
64.在本实施例中,声波发生器发出的声源频率在500hz附近,振动传感器通过对每条测量数据进行去除直流分量,带通滤波,求频谱,再把频谱多次叠加。随着被测传感器距离声源远近,可以调节采集次数,采集次数越多,传感器识别声波震动信号强度越远,测试发现500hz信号在管道中传输的距离最远,衰减最慢。方波和正弦波都可以。
65.在本实施例中,对于管道的水平探测精度高,满足大于10厘米,也就是说,能探测出最小间距10厘米的两个探测点的不同的信号强度值。
66.采用本实施例的探测方法,通过声波发生器,对燃气管道中的燃气施加固定频率的声波震动信号,声波震动信号在燃气管道中顺着燃气向前传输,顺着燃气管道向前传输的过程中也会带动燃气管道的振动,燃气管道振动再带动埋设管道的土壤的振动,土壤振动再带动地面振动,然后通过振动传感器来检测这种声波震动信号,声波发生器发射的是固定频率的声波震动信号,振动传感器探测时也只探测这个固定频率范围内的频率范围,滤除其它频率,包括外界的大部分振动,从而不会收到干扰,在远端用振动传感器在地面上采集声波震动信号的强弱,根据声波震动信号的特性和强弱来定位管道的位置,以此可探测出平面位置,结合现有雷达技术,可判读出管道埋深,通过进行多次进行采集和检测,在检测到的信号强度处于峰值时,将振动传感器所在的位置作为管道的正上方,这种探测方案不怕干扰,不会测错测偏,采用本实施例的方法可精确定位管道的三维空间,同时对于检测到的信号强度结果都是直观展示的,不依赖检测人员的经验,便于推广普及。
67.实施例3:
68.在步骤s1中包括以下步骤:
69.s101:将声波发生器在管道的接口位置处,对管道中的输送介质施加固定频率的声波震动信号,在本实施例中,声波发生器发出两个频率不同的固定频率的声波震动信号,譬如500hz和700hz;
70.s102:从声波发生器所在接口位置出发,每间隔设定的采样距离设置一个采样位置,在采样位置附近的在不同位置处,振动传感器分别采集随着管道传播的固定频率的声波震动信号,振动传感器对于采集到的信号数据,进行以下处理:
71.在步骤s102中,振动传感器对于采集到的信号数据,进行以下处理:
72.a、fft变换:通过快速傅里叶变换,将采集的信号数据,从时域信号转换为频域信号;
73.b、去除直流分量:对于频域信号数据,先进行累加求和然后在取平均值,然后在通过获取原始值减去平均值,获取零值的位置,通过零值漂移的方式去直流分量;
74.c、带通滤波:通过带通滤波,过滤设定的固定频率范围以外的频域信号数据;
75.d、剔除异常数据:对n组带通滤波后的信号数据先求和再求平均值,然后将每组信号数据除以n组信号数据的平均值获得比例数据,判断比例数据是否大于设定的比例系数,若大于,则删除对应的信号数据,若小于,则保留;
76.e、频域叠加:对每组剔除异常数据后留下的频谱信号数据进行频域叠加,获得有效的频域信号数据。
77.通过步骤e获得有效的频域信号数据,寻找频域信号数据的第一峰尖maxv1和第二峰尖maxv2,
78.当第一峰尖尖maxv1比第二峰尖maxv2大30%,且第一峰尖、第二峰尖maxv2的频率在固定频率
±
5hz的范围内,则认为第一峰尖为检测到的信号强度的峰值,否则,重新寻找第一峰尖和第二峰尖。
79.当振动传感器同时检测到500hz和700hz的声波震动信号均处于峰值时,以此刻振动传感器所在的位置作为管道的正上方,从而确定管道在地下的一个水平面坐标;
80.步骤s103:重复采集和检测若干次,获得若干个管道的正上方的坐标,确定管道在地下的水平面坐标。
81.步骤s2:根据获得的管道在地下的水平面坐标,通过雷达在管道的正上方测量管道的埋设深度;
82.步骤s3:通过管道在地下的水平面坐标和管道的埋设深度得到管道在地下的三维位置坐标。
83.在燃气管道井口安装信号发生器,信号发生器是固定频率,为了确保传播距离,本实施例在采用了低频的声波,500hz或者700hz,燃气管道内充满燃气,声音会通过燃气介质沿着管道传输。声音在燃气管道传输过程中,也会通过燃气管道向四周传输,传输到燃气管道的外面的土壤、碎石、沙土等地底环境中,再传输到地面。
84.信号发生器发射的是固定频率,探测器探测时也只探测这两个固定频率附近内的频率范围,滤除其它频率,包括外界的大部分振动。
85.在本实施例中,为了进一步确保数据的可靠性,采用了两个不同频率的声波震动信号,通过两个不同频率的声波震动信号相互佐证探测结果,从而进一步保证本实施例的探测方案不怕干扰,不会测错测偏。
86.见图2,在本发明的实施例中,还提供了一种埋地管道的探测系统,包括通讯连接的:
87.声波发生器1,声波发生器1设置在管道的接口位置处,譬如放散阀、调压箱、管道井,用于对管道中的输送介质施加声波震动信号;
88.振动传感器2,用于采集随着管道传播的声波震动信号;
89.控制终端3,控制终端2接收来自振动传感器2采集的声波震动信号,显示声波震动信号的信号强度,当检测到的信号强度处于峰值时,将振动传感器2所在的位置作为管道的
正上方,通过多次采集和检测确定多个坐标,从而获得管道在地下的水平面坐标;
90.雷达4,用于在获得管道在地下的水平面坐标后测量管道的埋设深度。
91.当振动传感器与控制终端连接时,用户点击控制终端的探测按钮时,以wifi为例,控制终端通过tcpclinet的连接通道,给振动传感器发送ack
‑
a命令,告诉振动传感器要开始采集数据,同时通过任务阻塞的方式等待振动传感器发送s
‑
acb数据包,任务阻塞时间如果超过两秒则判断为命令超时未响应,则会重新下发ack
‑
a命令,这个循环一直执行,直到接收到振动传感器的s
‑
acb数据包。
92.ack
‑
a数据命令包括6个字节的帧头,2个字节的命令字符,2个字节的读取时长,6个字节的帧尾,s
‑
aca数据包包含传感器的ip地址,mac地址,端口号,传感器编号信息
93.当振动传感器收到控制终端发送的ack
‑
a命令时,振动传感器对ack
‑
a命令进行数据解析,先进行异或校验,校验通过后,在通过解析控制终端下发的ack
‑
a命令中的第八位和第九位字节来确认采集的时长。然后开始执行控制终端下发的采集命令,采集完成后将数据以s
‑
acb数据包的格式传回给控制终端。
94.振动传感器通过解析ack
‑
a数据包中采集需要的时间后进行数据采集,采集完成后将s
‑
acb数据包返回给控制终端进行处理,控制终端在接收到s
‑
acb数据包后进行异或校验,校验未通过则会重新下发ack
‑
a命令让振动传感器重新进行数据采集,校验通过后在判断采集的波形时域图上的点数是否有4000个点,4000个点为设定的采集数量,这个采集数量也可以是其他数字如果有将原始数据以指定的文件名称存储未txt格式的文件,方便后期进行数据读取。如果采集点数少于4000,则控制终端会重新下发ack
‑
a命令让振动传感器重新进行数据采集。
95.接下来,本实施例中的埋地管道的探测系统,执行实施例1、2、3中任意一个的探测方法,都可以完成埋地管道的探测。
96.在本实施例中,控制终端3与振动传感器2通讯的方式包括wifi、2g、3g、4g、5g网络中的任意一种,控制终端可以是手机或者平板电脑,通过无线技术方式,将数据传输给控制终端,可实时观测振动信号强度,检测到的信号强度都是直观展示的,不依赖检测人员的经验,便于推广普及,如图3展示的,横坐标为探测点,最多能显示9个探测点,通过横向多点数据对比信号强度,可清晰判读出燃气管道水平位置。
97.此外在本实施例中,振动传感器还包括gps模块,gps模块采用差分gps设备,见图4,差分gps设备包括设置在振动传感器上的移动站201,差分gps设备还包括基准站202,移动站能够定位管道的地理位置,基准站实时的记录gps定位信息,通过与地面已知控制点的实际坐标值做比对处理,以解算得到移动站的修正量,以此对移动站的测量的管道的地理位置进行修正,采用本发明的方法和系统,确定管道位置时,检测时振动传感器位于管道的正上方,获得振动传感器的位置也就获得了管道的位置,结合管道在地下的三维位置坐标,可以定位管道的地理位置,通过gps定位功能,能够精确定位管道的地理位置,从而还原管道的真实位置,差分gps设备将一台gps接收机安置在基准站上进行观测。根据基准站已知控制点的实际坐标与gps接收机计算出的坐标,计算出真实坐标与gps定位得到的坐标的修正量,并由基准站实时将这一数据发送出去。用户接收机在进行gps观测的同时,也接收到基准站发出的修正量,并对其定位结果进行改正,从而提高定位精度。
98.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在
不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
99.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。