1.本发明涉及湖试声场测量校准装置,主要是一种基于激光接收阵列的湖试声场测量校准装置及校准方法。
背景技术:
2.21世界伊始,世界各国海军针对自身国防安全建设的需要,对海军工装备的发展提出了大量切实可行的设想。声呐系统作为海军工装备的核心设备之一,在探测识别可疑目标与实施必要警戒等方面起到了举足轻重的作用。在声呐系统投入到实际的应用中之前,必须对声纳设备的声学参数指标性能例如指向性,声场强度,声功率等指标进行严格的试验测量与校准。
3.水下声场测试环境复杂且多变,传统的水下声场测试环境为大型消声水池,利用其特定的吸声尖劈来模拟出无限大的自由场环境,从而使得设备能够适应于一定程度的海洋环境模拟。然而声纳设备的发展趋势逐渐往大功率与大尺寸方向倾斜,由于消声水池的水域空间限制,其在低频指向性指标的检测受到很大的限制,且不同深度的水域环境其温度,声速也发生了明显的变化,水听器阵列的性能也会受到深度的影响。随着深度的增加,其声场测试环境的可视程度越差,声源与水听器的正对性特征得不到保证,声源距离水听器阵列的水平距离与垂直高度的距离参数不准确,对声场测试的时效性以及正确的有很大程度的影响。因此对于保证声源与水听器阵列的声场测试的正对性特征与水平垂直距离的精确测量的装置研制迫在眉睫。
技术实现要素:
4.本发明的目的在于克服现有技术存在的不足,而提供一种基于激光接收阵列的湖试声场测量校准装置及校准方法,整个装置适应不同深度水下声场测试环境,能够对任意水下深度的声源与水听器阵列的正对性特征进行校准与水平垂直距离的精确测量。
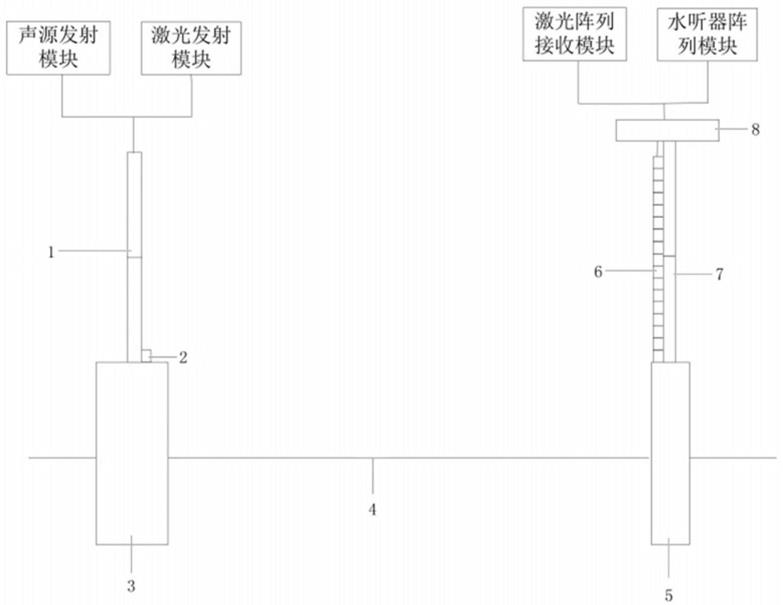
5.本发明的目的是通过如下技术方案来完成的。一种基于激光接收阵列的湖试声场测量校准装置,主要包括水声换能器、激光发射器、钢结构连接杆a、水听器阵列、激光接收阵列和钢结构连接杆b,所述的激光发射器垂直固定于水声换能器与钢结构连接杆a的连接处,激光接收阵列的首端设置于水听器阵列与钢结构连接杆b的连接处,激光接收阵列剩余的各基元依次并行笔直固定于钢结构连接杆b上,钢结构连接杆b与360度旋转台相连接。
6.所述的激光发射器与激光发射模块电连接,水声换能器与声源发射模块相连接;激光接收阵列与激光接收模块相连接,水听器阵列与水听器阵列模块相连接,激光发射模块与激光接收模块分别于工控笔记本相连接。
7.本发明提供了一种基于激光接收阵列的湖试声场测量校准方法,包括如下步骤:
8.1、对水声换能器和水听器阵列进行了垂直正对性校准,使得声源的发射面垂直正对于水听器阵列;将激光接收阵列进行编号,首端距离声中心的距离为水听器阵列高度的一半,利用激光发射器发射水平激光束,通过360度旋转台旋转水听器阵列使得激光接收阵
列的首端接收到激光束信号,并将采集到激光束发送至工控笔记本;
9.2、将水声换能器和水听器阵列放至湖面以下任意深度后,发射激光束,旋转水听器阵列使得并行于钢结构连接杆b的激光接收阵列的各基元通道采集激光信号并反馈至工控笔记本,从而判断出湖面以下任意深度的声场测试环境的正对性特征以及声源距离水听器阵列的水平距离与垂直高度。
10.本发明的有益效果为:本发明运用激光发射器与激光接收阵列匹配结构来提高水下声场测试中声源与水听器阵列的正对性特征,并将激光接收阵列进行编号,根据笔记本显示控制台上的激光接收阵元通道能够保证正对性特征的同时精确计算出声源和水听器阵列的水平距离和垂直高度。弥补了连接杆与旋转台机构转动引起的小角度误差,从而提高水声测试试验的精度和效率。
附图说明
11.图1为本发明湖面初步校准示意图;
12.图2为本发明湖面以下任意深度声场测试环境示意图;
13.图3为本发明激光发射器安装正视图;
14.图4为本发明激光接收阵列安装示意图。
15.附图标记说明:1、钢结构连接杆a,2、激光发射器,3、水声换能器,4、湖面,5、水听器阵列,6、激光接收阵列,6
‑
1、首端,7、钢结构连接杆b,8、360度旋转台。
具体实施方式
16.下面将结合附图对本发明做详细的介绍:
17.如图所示,一种基于激光接收阵列的湖试声场测量校准装置,主要包括水声换能器3、激光发射器2、钢结构连接杆a1、水听器阵列5、激光接收阵列6和钢结构连接杆b7,所述的激光发射器2垂直固定于水声换能器3与钢结构连接杆a1的连接处。将激光接收阵列进行小间隔分块编号后,激光接收阵列6的首端6
‑
1设置于水听器阵列5与钢结构连接杆b7的连接处,激光接收阵列6剩余的各基元依次并行笔直固定于钢结构连接杆b7上,钢结构连接杆b7与360度旋转台8相连接。
18.机理:利用360度旋转台机构旋转水听器阵列使得激光接收阵列的首端接收到激光束信号实现声场测试设备的正对性特征。并对首端以后的激光接收基元进行编号并在工控笔记本进行各通道接收信号的显示。水声换能器3(声源)与水听器阵列放置于湖面以下任意深度下,利用激光接收阵列能够得出声源与水听器阵列的水平距离和垂直高度指标。
19.所述的激光发射器2与激光发射模块电连接,水声换能器3与声源发射模块相连接;激光接收阵列6与激光接收模块相连接,水听器阵列5与水听器阵列模块相连接,激光发射模块与激光接收模块分别于工控笔记本相连接。
20.一种基于激光接收阵列的湖试声场测量校准方法,包括如下步骤:
21.1、如图1所示,将激光接收阵列6进行编号,首端6
‑
1距离声中心的距离为水听器阵列5高度的一半,利用激光发射器2发射水平激光束,通过360度旋转台8旋转水听器阵列5使得激光接收阵列6的首端接收到激光束信号,并将采集到激光束发送至工控笔记本;该情况下表明在湖面对水声换能器3(声源)和水听器阵列5进行了垂直正对性校准,使得声源的发
射面垂直正对于水听器阵列5;激光接收阵列首端基元采集到激光束信号并反馈至工控笔记本,笔记本首端信号通道接收到激光信号表明声源与水听器阵列进行了初步的对准。
22.2、如图2所示,将水声换能器3和水听器阵列5放至湖面4以下任意深度后(钢结构连接杆a和钢结构连接杆b均是由多个杆子套接固定而成,可以按照需要的深度增加杆子的数量,也可以采用升降机构来实现相同的功能),发射激光束,旋转水听器阵列5使得并行于钢结构连接杆b7的激光接收阵列6的各基元通道采集激光信号并反馈至工控笔记本,从而判断出湖面以下任意深度的声场测试环境的正对性特征以及声源距离水听器阵列的水平距离与垂直高度。
23.本发明由于连接杆,旋转台电机等设备会对旋转角度带来一定的影响,会影响测试设备的正对特征,故在任意深度情况下发射激光束,并以小角度和小速度旋转水听器阵列结构,当激光接收阵列采集到激光束信号之后,相应的激光接收阵列基元编号的通道,每个接收阵列基元的高度是一定的,编号*单个基元的高度就可以得到该接收基元到首端的垂直高度,能够计算出声源与水听器阵列的水平距离与垂直高度。弥补了水下声场过深,声场的可视化程度低的特征,能够在水下声场测试任意深度情况下保证水声声源的正对性特征和声源与水听器阵列水平垂直距离的精确计算。
24.本发明公开了一种基于激光接收阵列的湖试声场对准及水平垂直测距装置。本发明基于激光发射器与激光接收阵列匹配,能够实现湖试声场水下任意深度情况下声源与水听器阵列的正对性特征的实现,在保证两者正对性特征情况下,精确测量声源与水听器阵列的水平距离与垂直高度,能够弥补连接杆与旋转机构对声场测试环境带来的小角度误差情况,另外,整个装置结构精简,设计轻便易安装,装置集成化程度高。
25.可以理解的是,对本领域技术人员来说,对本发明的技术方案及发明构思加以等同替换或改变都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。