1.本发明涉及运输工具领域,尤其涉及一种用于运送工程档案的智能工具车。
背景技术:
2.在现有技术的工程档案管理和运送过程中,一般都是由人工进行整理和运送,或者是由一般的传送带等传送设备进行传送运输,而这两种方式都会耗费大量的成本以及空间,而且如果要进行档案搬运时的分类,就要增加更多的消耗,同时由于运送地点的变化,或者人员对分类放置的位置不熟悉,可能会出现分类错漏的问题。
3.一种在中国专利文献上公开的“智能档案资料盘点推车”,其公告号cn104608811b,包括推车本体,所述推车本体由设备区和储存区组成,所述推车本体的两侧设有可调节的rdif识别装置,所述推车本体的底部两侧设有能够自动展开的两翼伸缩式装置,通过移动推车一次性推过即可快速准确的盘点出档案资料的信息,极大的提高了工作效率,简化了工作流程,增强可工作人员的管理能力。其不足之处:没有实现档案分类运输。
技术实现要素:
4.本发明主要是为了解决没有实现档案分类运输的问题,提供一种用于运送工程档案的智能工具车,可以实现档案分类运输的目的。
5.为了实现上述目的,本发明采用以下技术方案:一种用于运送工程档案的智能工具车,包括:行走模块,用于控制工具车的前进方向;识别模块,用于检测行进方向的阻碍物、扫描信息和进行工作记录;档案分类箱,用于实现档案分区并归类放置。
6.所述行走模块的上表面与地面平行,便于安装所述识别模块和所述档案分类箱。所述档案分类箱可以实现将不同的档案分类放置,从而将档案分区。所述识别模块可以得到出发射点距障碍物的距离,从而防止工具车与墙体或者其他障碍物碰撞。
7.作为优选,所述档案分类箱和所述识别模块均设在所述行走模块上方,所述档案分类箱设在所述识别模块后侧。
8.所述识别模块设在所述档案分类箱前侧,便于所述识别模块识别前方的情况,避免所述档案分类箱的阻挡造成识别不清楚等影响。所述行走模块用于带动所述档案分类箱和所述识别模块行动。
9.作为优选,所述档案分类箱包括箱体和盖体,所述箱体顶部两侧均设有滑轨,所述滑轨上设有一个与所述滑轨滑动连接的滑块,所述滑块之间设有转动轴,所述盖体与所述转动轴转动连接。
10.所述箱体顶部两侧的每一侧均设有所述滑轨,即所述滑轨有两条,且相互对应平行。所述滑块可以在所述滑轨中滑动,通过设置在所述滑块之间的所述转动轴带动所述盖体实现直线往复运动。
11.所述盖体能够通过所述转动轴的旋转调整所述盖体与所述箱体顶面之间的角度,便于将不同的档案顺着所述盖体滑入所述箱体中,实现档案的放置。
12.所述盖体在档案放置完成后,还可以通过所述转动轴、滑轨和滑块之间的配合,将所述箱体盖住,防止档案在运输过程中的脱落。
13.作为优选,每个所述滑块上设有轴孔,所述转动轴安装在所述轴孔中。
14.所述轴孔用于安装所述转动轴,便于所述转动轴的转动与定位。
15.作为优选,所述箱体内部设有分隔板。
16.所述分隔板的顶面与所述转动轴平行,所述分隔板将所述箱体分隔成两个部分,用于存放不同的档案,实现档案的分区。所述盖体在所述箱体顶部滑动到所述分隔板两侧时,可以实现将不同的档案顺着所述盖体滑进所述分隔板的两侧,实现档案分区。此时,所述盖体可以起到运输档案的作用。
17.作为优选,所述行走模块包括车体、用于控制方向的前轮和用于驱动的后轮,所述前轮设在所述车体前侧的下表面,所述后轮设在所述车体后侧的两侧面上,所述档案分类箱和所述识别模块均设在所述车体上表面。
18.所述前轮为方向轮,用于控制整个工具车行进时的方向;所述后轮为驱动轮,用于带动整个工具车的行进。所述前轮和所述后轮均为硅胶车轮。所述前轮直径小于所述后轮直径,两者最低端的切线呈同一直线,便于保持工具车的平衡,方便运输档案和识别障碍物。
19.作为优选,所述识别模块包括垂直固定在所述车体上表面的垂直板、转动连接在所述垂直板上的调整板。
20.所述调整板通过转轴固定在所述垂直板顶部,从而使所述调整板与所述垂直板实现可旋转的固定连接。
21.作为优选,所述垂直板上设有用于检测行进方向阻碍物的测距单元,所述调整板前侧设有扫描单元,所述调整板后侧设有显示单元。
22.所述测距单元为超声波测距模块,所述超声波测距模块有两个压电晶片和一个共振板,当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器。超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时,根据计时器记录的时间,就可以得到出发射点距障碍物的距离,所述超声波测距模块用于检测车体行进方向的阻碍物,防止车体与墙体或者其他障碍物碰撞。
23.所述扫描单元包括二维码识别模块,所述显示单元为液晶显示屏。在工具车行进过程中,当需要调整方向时,可以在工具车行进的路面上设置用于改变行程方向的二维码贴图,当工具车的所述扫描单元扫描到所述二维码贴图时,根据二维码贴图代表的路线指示,对所述行走模块进行在行进方向上的调整。
24.同时,所述扫描单元扫描到的二维码信息能够显示在所述液晶显示屏上,所述扫描单元还具有摄像记录功能,能够进行工作记录。
25.作为优选,所述车体内设有主控单元、动力单元和驱动单元,所述主控单元分别连
接所述测距单元和所述扫描单元,所述动力单元分别连接所述主控单元和所述驱动单元,所述驱动单元连接所述前轮和所述后轮。
26.所述主控单元与所述超声波测距模块和所述扫描单元通讯连接,用于接收所述超声波测距模块的测距信息和所述扫描单元扫描到的二维码信息。
27.所述驱动单元驱动所述行走模块,用于带动所述前轮调整方向、带动所述后轮行进。
28.所述动力单元为蓄电池,所述蓄电池使用两节3.7v的锂电池用于供电。
29.作为优选,所述车体上还设有外接接口。
30.所述外接接口为usb接口,用于外部设备的数据传输。
31.本发明的有益效果是:(1)通过档案分类箱的分隔板、箱体、盖体之间的配合,实现档案分区的功能。
32.(2)通过档案分类箱、行走模块和识别模块,实现档案分区运输和智能运输的功能,节省了成本和人力、节约空间。
33.(3)通过转动轴、盖体、滑块和滑轨之间的配合,实现将不同的档案顺着盖体滑进分隔板的两侧,实现档案分区;同时,盖体能够进行角度调整,可以提高放置的效率,提高分类精度,避免文件分类时滑落到错误的分区。
34.(4)需要调整方向时,可以在工具车行进的路面上设置用于改变行程方向的二维码贴图,当智能工具车的扫描单元扫描到所述二维码贴图时,根据二维码贴图代表的路线指示,对行走模块进行在行进方向上的调整。
35.(5)所述测距单元可以检测车体行进方向的阻碍物,防止车体与墙体或者其他障碍物碰撞。
附图说明
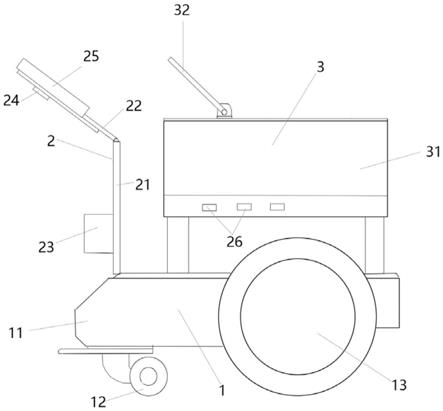
36.图1是本发明的结构示意图。
37.图2是档案分类箱的结构示意图。
38.图示说明:1
‑
行走模块,2
‑
识别模块,3
‑
档案分类箱,11
‑
车体,12
‑
前轮,13
‑
后轮,21
‑
垂直板,22
‑
调整板,23
‑
测距单元,24
‑
扫描单元,25
‑
显示单元,26
‑
外接接口,31
‑
箱体,32
‑
盖体,33
‑
转动轴,34
‑
分隔板,311
‑
滑轨,312
‑
滑块,313
‑
轴孔。
具体实施方式
39.下面结合附图和具体实施方式对本发明进一步的描述。
40.如图1所示,一种用于运送工程档案的智能工具车,包括:行走模块1,用于控制工具车的前进方向;识别模块2,用于检测行进方向的阻碍物、扫描信息和进行工作记录;档案分类箱3,用于实现档案分区并归类放置。
41.行走模块的上表面与地面平行,便于安装识别模块和档案分类箱。档案分类箱可以实现将不同的档案分类放置,从而将档案分区。识别模块可以得到出发射点距障碍物的距离,从而防止工具车与墙体或者其他障碍物碰撞。
42.档案分类箱和识别模块均设在行走模块上方,档案分类箱设在识别模块后侧。
43.识别模块设在档案分类箱前侧,便于识别模块识别前方的情况,避免档案分类箱的阻挡造成识别不清楚等影响。行走模块用于带动档案分类箱和识别模块行动。
44.行走模块包括车体11、用于控制方向的前轮12和用于驱动的后轮13,前轮设在车体前侧的下表面,后轮设在车体后侧的两侧面上,档案分类箱和识别模块均设在车体上表面。
45.前轮为方向轮,用于控制整个工具车行进时的方向;后轮为驱动轮,用于带动整个工具车的行进。前轮和后轮均为硅胶车轮。前轮直径小于后轮直径,两者最低端的切线呈同一直线,便于保持工具车的平衡,方便运输档案和识别障碍物。
46.识别模块包括垂直固定在车体上表面的垂直板21、转动连接在垂直板上的调整板22。
47.调整板通过转轴固定在垂直板顶部,从而使调整板与垂直板实现可旋转的固定连接。
48.垂直板上设有用于检测行进方向阻碍物的测距单元23,调整板前侧设有扫描单元24,调整板后侧设有显示单元25。
49.测距单元为超声波测距模块,超声波测距模块有两个压电晶片和一个共振板,当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器。超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时,根据计时器记录的时间,就可以得到出发射点距障碍物的距离,超声波测距模块用于检测车体行进方向的阻碍物,防止车体与墙体或者其他障碍物碰撞。
50.扫描单元包括二维码识别模块,显示单元为液晶显示屏。在工具车行进过程中,当需要调整方向时,可以在工具车行进的路面上设置用于改变行程方向的二维码贴图,当工具车的扫描单元扫描到二维码贴图时,根据二维码贴图代表的路线指示,对行走模块进行在行进方向上的调整。
51.同时,扫描单元扫描到的二维码信息能够显示在液晶显示屏上,扫描单元还具有摄像记录功能,能够进行工作记录。
52.车体内设有主控单元、动力单元和驱动单元,主控单元分别连接测距单元和扫描单元,动力单元分别连接主控单元和驱动单元,驱动单元连接前轮和后轮。
53.主控单元与超声波测距模块和扫描单元通讯连接,用于接收超声波测距模块的测距信息和扫描单元扫描到的二维码信息。
54.驱动单元驱动行走模块,用于带动前轮调整方向、带动后轮行进。
55.动力单元为蓄电池,蓄电池使用两节3.7v的锂电池用于供电。
56.车体上还设有外接接口26。
57.外接接口为usb接口,用于外部设备的数据传输。
58.如图2所示,档案分类箱包括箱体31和盖体32,箱体顶部两侧均设有滑轨311,滑轨上设有一个与滑轨滑动连接的滑块312,滑块之间设有转动轴33,盖体与转动轴转动连接。
59.箱体顶部两侧的每一侧均设有滑轨,即滑轨有两条,且相互对应平行。滑块可以在
滑轨中滑动,通过设置在滑块之间的转动轴带动盖体实现直线往复运动。
60.盖体能够通过转动轴的旋转调整盖体与箱体顶面之间的角度,便于将不同的档案顺着盖体滑入箱体中,实现档案的放置。
61.盖体在档案放置完成后,还可以通过转动轴、滑轨和滑块之间的配合,将箱体盖住,防止档案在运输过程中的脱落。
62.每个滑块上设有轴孔313,转动轴安装在轴孔中。
63.轴孔用于安装转动轴,便于转动轴的转动与定位。
64.箱体内部设有分隔板34。
65.分隔板的顶面与转动轴平行,分隔板将箱体分隔成两个部分,用于存放不同的档案,实现档案的分区。盖体在箱体顶部滑动到分隔板两侧时,可以实现将不同的档案顺着盖体滑进分隔板的两侧,实现档案分区。此时,盖体可以起到运输档案的作用。
66.应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。