技术特征:
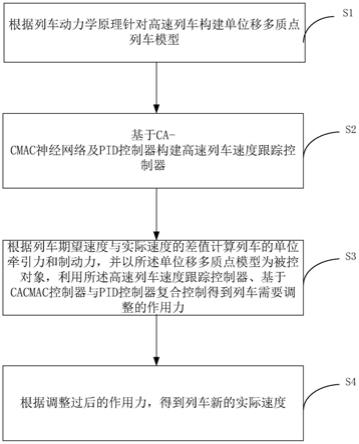
1.一种高速列车速度控制方法,包括如下步骤:步骤s1,根据牛顿第二定律和列车动力学原理针对高速列车构建单位移多质点列车模型;步骤s2,基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器;步骤s3,利用所述高速列车速度跟踪控制器,根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,基于cacmac控制器与pid控制器复合控制得到列车需要调整的作用力;步骤s4,根据调整过后的作用力,得到列车新的实际速度。2.如权利要求1所述的一种高速列车速度控制方法,其特征在于,所述单位移多质点模型为:其中,m
i
表示第i节车厢的质量,第i节车厢的加速度,为第i节车厢与第i 1节车厢之间加速度的差值,u
i
表示列车第i节车厢的牵引力和制动力,f
hi
和f
ri
表示第i节车厢的基本阻力和附加阻力。3.如权利要求2所述的一种高速列车速度控制方法,其特征在于:于步骤s2中,所述高速列车速度跟踪控制器包括信度分配小脑模型关节控制器和pid控制器,其中输入信号与输出信号经第一加法器相减得到误差信号,输入信号与输出信号经所述信度分配小脑模型关节控制器得到实际控制输出,所述误差信号经pid控制器得到比例输出信号,所述比例输出信号与实际控制输出经第二加法器相加得到总控制量,用于控制被控对象输出实际输出信号。4.如权利要求3所述的一种高速列车速度控制方法,其特征在于,步骤s3进一步包括:步骤s300,获取列车的期望速度和实际速度,将二者的差值作为误差信号;步骤s301,根据所述误差信号计算列车的单位牵引力和制动力;步骤s302,利用得到的列车的单位牵引力和制动力,以所述单位移多质点模型为被控对象,根据cacmac与pid复合控制得到列车需要调整的作用力。5.如权利要求4所述的一种高速列车速度控制方法,其特征在于:于步骤s301中,通过该误差信号计算pid控制器的控制输出得到比例输出信号u
p
,并将列车的期望速度和实际速度经信度分配小脑模型关节控制器得到实际控制输出u
n
,将该比例输出信号u
p
与实际控制输出u
n
相加得到总控制量u(k),即列车的单位牵引力和制动力。6.如权利要求5所述的一种高速列车速度控制方法,其特征在于:于步骤s302中,根据得到的列车的单位牵引力和制动力,结合所述高速列车速度跟踪控制器的权值修正公式,实时更新所述信度分配小脑模型关节控制器的权值,产生新的总控制量u(k),即列车需要调整的作用力。7.如权利要求6所述的一种高速列车速度控制方法,其特征在于,所述高速列车速度跟踪控制器的权值修正公式为:
w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)]其中,e(k)、δw(k)均表示权值的修正因子,f(i)表示cacmac存储空间中第i个单元的学习次数,w(k)、w(k
‑
1)分别表示k时刻、k
‑
1时刻cacmac物理存储空间中的权值,η是学习常数,a
i
表示cacmac存储空间中的存储信息,c为泛化参数。8.一种高速列车速度控制系统,包括:单位移多质点列车模型构建单元,用于根据牛顿第二定律和列车动力学原理针对高速列车构建单位移多质点列车模型;高速列车速度跟踪控制器构建单元,用于基于cacmac神经网络及pid控制器构建高速列车速度跟踪控制器;高速列车速度跟踪控制器,用于根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,利用所述高速列车速度跟踪控制器、基于cacmac与pid复合控制得到列车需要调整的作用力,从而得到新的列车实际速度。9.如权利要求8所述的一种高速列车速度控制系统,其特征在于:所述高速列车速度跟踪控制器进一步包括:误差信号计算模块,用于获取列车的期望速度和实际速度,将二者的差值作为误差信号e;pid控制器,用于根据所述误差信号得到比例输出信号u
p
;信度分配小脑模型关节控制器,用于根据列车的期望速度与实际速度得到实际控制输出u
n
;总控制量计算模块,用于根据比例输出信号u
p
与实际控制输出u
n
得到系统的总控制量u(k),即列车的单位牵引力和制动力;权值更新模块,用于以单位移多质点列车模型为被控对象,根据高速列车速度跟踪控制器的权值修正公式实时更新信度分配小脑模型关节控制器的权值,并产生新的总控制量u(k)。10.如权利要求9所述的一种高速列车速度控制系统,其特征在于,所述高速列车速度跟踪控制器的权值修正公式为:跟踪控制器的权值修正公式为:w(k)=w(k
‑
1) δw(k) α[w(k
‑
1)
‑
w(k
‑
2)]其中,e(k)、δw(k)均表示权值的修正因子,f(i)表示cacmac存储空间中第i个单元的学习次数,w(k)、w(k
‑
1)分别表示k时刻、k
‑
1时刻cacmac物理存储空间中的权值,η是学习常数,a
i
表示cacmac存储空间中的存储信息,c为泛化参数。
技术总结
本发明公开了一种高速列车速度控制方法及系统,该方法包括如下步骤:步骤S1,根据列车动力学原理针对高速列车构建单位移多质点列车模型;步骤S2,基于CACMAC神经网络及PID控制器构建高速列车速度跟踪控制器;步骤S3,利用所述高速列车速度跟踪控制器,根据列车期望速度与实际速度的差值计算列车的单位牵引力和制动力,并以所述单位移多质点模型为被控对象,基于CACMAC控制器与PID控制器复合控制得到列车需要调整的作用力;步骤S4,根据调整过后的作用力,得到列车新的实际速度。得到列车新的实际速度。得到列车新的实际速度。
技术研发人员:梁新荣 王雪奇 莫晓婷 董超俊
受保护的技术使用者:五邑大学
技术研发日:2021.09.09
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。