技术特征:
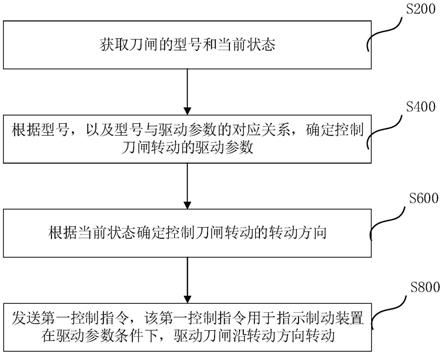
1.一种电力系统刀闸控制方法,其特征在于,包括:获取刀闸的型号和当前状态;所述当前状态包括分闸状态和合闸状态;根据所述型号,以及型号与驱动参数的对应关系,确定控制所述刀闸转动的驱动参数;根据所述当前状态确定控制所述刀闸转动的转动方向;发送第一控制指令;所述第一控制指令用于指示制动装置在所述驱动参数的条件下,驱动所述刀闸沿所述转动方向转动。2.根据权利要求1所述的电力系统刀闸控制方法,其特征在于,所述根据所述型号,以及型号与驱动参数的对应关系,确定控制所述刀闸转动的驱动参数之前,还包括:确定型号与驱动参数的对应关系。3.根据权利要求2所述的电力系统刀闸控制方法,其特征在于,所述驱动参数为临界力矩;所述确定型号与驱动参数的对应关系,包括:发送第二控制指令;所述第二控制指令用于指示制动装置施加预设初始力矩,驱动所述刀闸沿当前转动方向转动;判断所述刀闸是否能沿当前转动方向转动;在所述刀闸能沿当前转动方向转动的情况下,将当前力矩减去预设值,并对应改变转动方向,直至所述刀闸不能沿当前转动方向转动,得到临界力矩;获取所述刀闸的型号,并根据所述型号以及所述临界力矩,确定型号与临界力矩的对应关系。4.根据权利要求3所述的电力系统刀闸控制方法,其特征在于,所述判断所述刀闸是否能沿当前转动方向转动之后,所述在所述刀闸能沿当前转动方向转动的情况下,将当前力矩减去预设值,并对应改变转动方向,直至所述刀闸不能沿当前转动方向转动,得到临界力矩之前,还包括:在所述刀闸不能沿当前转动方向转动的情况下,将当前力矩加上设定值,直至所述刀闸能沿当前转动方向转动;所述设定值大于所述预设值。5.根据权利要求1至4任意一项所述的电力系统刀闸控制方法,其特征在于,所述发送第一控制指令之后,还包括:判断所述刀闸是否转动到位;若是,发送结束指令;所述结束指令用于指示所述制动装置停止运行;若否,发送报警信息。6.根据权利要求5所述的电力系统刀闸控制方法,其特征在于,所述判断所述刀闸是否转动到位,包括:将当前驱动参数增加临界值后,若所述刀闸仍无法转动,确定所述刀闸转动到位;否则,确定所述刀闸未转动到位。7.一种电力系统刀闸控制装置,其特征在于,包括:获取模块,用于获取刀闸的型号和当前状态;所述当前状态包括分闸状态和合闸状态;参数确定模块,用于根据所述型号,以及型号与驱动参数的对应关系,确定控制所述刀闸转动的驱动参数,以及根据所述当前状态确定控制所述刀闸转动的转动方向;发送模块,用于发送第一控制指令;所述第一控制指令用于指示制动装置在所述驱动参数的条件下,驱动所述刀闸沿所述转动方向转动。
8.根据权利要求7所述的电力系统刀闸控制装置,其特征在于,还包括:生成模块,用于确定型号与驱动参数的对应关系。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种电力系统刀闸控制方法、装置、计算机设备和存储介质。该电力系统刀闸控制方法包括:获取刀闸的型号和当前状态;当前状态包括分闸状态和合闸状态;根据该型号,以及型号与驱动参数的对应关系,确定控制该刀闸转动的驱动参数;根据当前状态确定控制该刀闸转动的转动方向;发送第一控制指令;该第一控制指令用于指示制动装置在该驱动参数的条件下,驱动该刀闸沿转动方向转动。上述电力系统刀闸控制方法,由控制装置直接控制制动装置驱动刀闸转动,实现刀闸的分合闸操作,无需人员参与,有利于降低人力成本,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:陈垲 崔学龙 尹国富 郭纯海 郗家峰 续兴 王生杰 李杨 吴钰膏 杜爱平 李有有 沈应靠 付强 马鸿波
受保护的技术使用者:中国南方电网有限责任公司超高压输电公司大理局
技术研发日:2021.08.18
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。