1.本技术涉及电路技术领域,尤其涉及一种驱动器、电机驱动电路及动力系统。
背景技术:
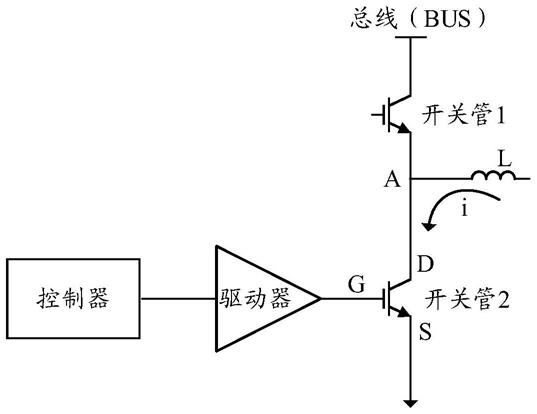
2.在电动汽车领域,续航里程焦虑是主要问题之一,通过提高电机驱动效率可以提高续航里程。电机驱动电路通常由控制器、驱动器和开关管组成,如图1所示。驱动器驱动开关管2导通和关断,从而产生驱动电流。其中,电感l可以视为电机绕组。驱动器控制开关管2时产生的开关损耗在驱动器功耗中占据很大比例,因此可以通过降低开关损耗的方式来提高驱动器的效率。
3.在图1所示的电机驱动电路中,开关管2开关的速度影响开关损耗:开关速度越快,开关损耗越低、电机驱动效率越高。但是,开关管2的开关速度还会影响流过开关管2的电流di/dt大小:开关速度越快,di/dt越大。由于电感l的存在,在控制开关管2导通和关断的过程中,开关管2的漏极d与源极s之间会叠加感应电压vs,vs=l*di/dt。因此,提高开关速度会使得开关管2承受较大电压,增加开关管2的应力。尤其是关断过程所产生的应力vs,极易导致开关管2损坏。
4.为了减小开关管2在导通和关断过程所承受的应力,传统的开关管驱动方案可以如图2所示。在图2所示的驱动器中,当控制开关管2导通时,t1闭合、t2关断,驱动器向开关管2的栅极g注入电流,使得栅极电压vgate增大,直至开关管2导通;当控制开关管2关断时,t1关断、t2闭合,驱动器从开关管2的栅极g抽取电流(栅极电流的反向与控制开关管2导通时的栅极电流方向相反),使得栅极电压vgate减小,直至开关管2关断。为了降低驱动电流,t1和t2分别串联电阻ron和roff,以降低开关管2的导通速度和关断速度。
5.与低负载工况或额定工况相比,在高负载工况下,开关管2开关时di/dt更大,开关管2的应力更大。因此,为了使电阻ron和roff能适配高负载条件下的应力要求,通常将电阻ron和roff设置得较大。但是,采用这种设置,在低负载工况或额定工况下,会使得开关管2的开关速度降低,增加了驱动器的损耗。特别是对于关断过程,由于关断过程开关管2的应力更大,因而roff设置的较大,导致关断速度慢、关断损耗大、驱动效率低。
6.因此,亟需一种电机驱动方案,在满足开关管应力要求的前提下,降低驱动器的损耗,提高电机驱动效率。
技术实现要素:
7.本技术实施例提供一种驱动器、电机驱动电路及动力系统,用以在满足开关管应力要求的前提下,降低驱动器的损耗,提高电机驱动效率。
8.第一方面,本技术实施例提供一种驱动器。该驱动器包括检测电路和输出电路。其中,检测电路用于检测开关管的栅极电压,并根据栅极电压输出栅极电压指示信息,栅极电压指示信息用于指示栅极电压的所属区间;输出电路与检测电路耦合,用于在控制器输出的控制信号指示驱动器控制开关管关断时输出关断驱动电流;其中,当栅极电压指示信息
指示栅极电压大于第一阈值时,关断驱动电流的电流值为第一电流值,当栅极电压指示信息指示栅极电压小于或等于第一阈值时,关断驱动电流的电流值由第一电流值切换为第二电流值,第二电流值小于第一电流值。
9.其中,第一阈值可以为开关管处于米勒平台时,栅极电压的上限值。
10.采用第一方面提供的驱动器,检测电路检测开关管的栅极电压,输出电路在控制器输出的控制信号指示控制开关管关断时,分段输出关断驱动电流:在接收到控制信号(指示开关管关断)时,输出的关断驱动电流的电流值为第一电流值,从而提高开关管的关断速度,降低关断损耗;在栅极电压持续下降至小于或等于第一阈值时,输出的关断驱动电流的电流值为由较大的第一电流值切换为较小的第二电流值,从而在开关管到达米勒平台时降低关断速度、减小开关管的应力,避免在米勒平台阶段出现开关管承受的应力较大的情况。
11.在一种可能的设计中,控制信号脉冲宽度调制pwm波,pwm波的下降沿用于指示驱动器控制开关管关断,pwm波的上升沿用于指示驱动器控制开关管导通。
12.在一种可能的设计中,当栅极电压指示信息指示栅极电压小于或等于第二阈值时,或者当关断驱动电流的电流值为第二电流值的持续时长达到第一预设时长时,关断驱动电流的电流值可以由第二电流值切换为第三电流值,第三电流值大于第二电流值。
13.其中,第二阈值可以为开关管处于米勒平台时,栅极电压的下限值。
14.采用上述方案,当开关管的栅极电压继续下降,直至离开米勒平台后,输出电路可以将开关管的关断驱动电流的电流值由数值较小的第二电流值切换为数值较大的第三电流值,从而提高开关管的关断速度,降低关断损耗。在米勒平台阶段的后期,开关管会承受较大的应力,因而在开关管的关断过程中,可以在米勒平台阶段用较小的驱动电流(第二电流值)驱动开关管,在到达米勒平台之前以及离开米勒平台之后,分别用较大的驱动电流(第一电流值和第三电流值)驱动开关管,从而避免在米勒平台阶段出现开关管承受应力较大的问题,满足开关管的应力要求。
15.在一种可能的设计中,输出电路还可以根据控制器输出的负载工况信息确定第二电流值和/或第一预设时长,其中,负载工况信息用于指示驱动器的负载的功率(功率等级)。
16.采用上述方案,输出电路可以根据驱动器的负载的功率,对第二电流进行更为精细的调节,从而在米勒平台阶段适配不同的负载工况。
17.第一方面提供的驱动器,除了用于驱动开关管关断,还用于驱动开关管导通。那么,在一种可能的设计中,输出电路还可以用于在控制信号指示驱动器控制开关管导通时输出导通驱动电流;其中,当栅极电压指示信息指示栅极电压小于第二阈值时,导通驱动电流的电流值为第四电流值,当栅极电压指示信息指示栅极电压大于或等于第二阈值时,导通驱动电流的电流值由第四电流值切换为第五电流值,第五电流值小于第四电流值。
18.采用上述方案,输出电路在控制器输出的控制信号指示控制开关管导通时,也是分段输出驱动电流的:在接收到控制信号(指示开关管导通)时,导通驱动电流的电流值较大,为第四电流值,从而提高开关管的导通速度,降低导通损耗;在栅极电压大于或等于第二阈值时,开关管到达米勒平台,导通驱动电流的电流值减小至第五电流值,从而在开关管到达米勒平台时降低导通速度,减小开关管的应力,从而避免在米勒平台阶段出现开关管承受的应力较大的情况。
19.在一种可能的设计中,当栅极电压指示信息指示栅极电压大于或等于第一阈值时,或者当导通驱动电流的电流值为第五电流值的持续时长达到第二预设时长时,导通驱动电流的电流值可以由第五电流值切换为第六电流值,第六电流值大于第五电流值。
20.采用上述方案,当开关管的栅极电压继续上升,直至离开米勒平台后,输出电路可以将导通驱动电流的电流值由数值较小的第五电流值切换为数值较大的第六电流值,从而提高开关管的导通速度,降低导通损耗。在米勒平台阶段的后期,开关管所承受的应力更大,因而在开关管的导通过程中,可以在米勒平台阶段用较小的导通驱动电流(第五电流值)驱动开关管,在到达米勒平台之前以及离开米勒平台之后,分别用较大的导通驱动电流(第四电流值和第六电流值)驱动开关管,从而避免在米勒平台阶段出现开关管承受的应力较大的情况,满足开关管的应力要求。
21.在一种可能的设计中,输出电路可以根据控制器输出的负载工况信息确定第五电流值和/或第二预设时长,负载工况信息用于指示驱动器的负载的功率。
22.采用上述方案,输出电路可以根据驱动器的负载的功率,对第五电流进行更为精细的调节,从而在米勒平台阶段适配不同的负载工况。
23.下面对第一方面提供的驱动器中的各个功能模块的具体结构进行介绍。
24.在一种可能的设计中,输出电路可以包括逻辑判断电路、第一电流输出模块和第二电流输出模块。其中,逻辑判断电路与检测电路耦合,用于在控制信号指示驱动器控制开关管关断时将第一使能信号置为有效,在栅极电压指示信息指示栅极电压小于或等于第一阈值时将第一使能信号置为无效、并将第二使能信号置为有效;第一电流输出模块与逻辑判断电路耦合,用于在第一使能信号有效时输出第一电流,第一电流的电流值为第一电流值;第二电流输出模块与逻辑判断电路耦合,用于在第二使能信号有效时输出第二电流,第二电流的电流值为第二电流值。
25.采用上述方案,可以通过逻辑判断电路输出的使能信号使能不同的电流输出模块,从而输出电流值不同的关断驱动电流。
26.此外,逻辑判断电路还可以在栅极电压指示信息指示栅极电压小于或等于第二阈值时,或在第二电流输出模块输出第二电流的持续时长达到第一预设时长时,将第三使能信号置为有效;那么,相应地,输出电路中还可以包括第三电流输出模块,第三电流输出模块与逻辑判断电路耦合,用于在第三使能信号有效时输出第三电流,第三电流的电流值为第三电流值。
27.采用上述方案,可以通过逻辑判断电路输出的第三使能信号使能第三电流输出模块,从而输出第三电流,作为经过米勒平台阶段以后的关断驱动电流。
28.进一步地,逻辑判断电路还可以在栅极电压指示信息指示栅极电压小于或等于第二阈值时,或在第二电流输出模块输出第二电流的持续时长达到第一预设时长时,将第二使能信号置为无效。
29.采用上述方案,在经过米勒平台阶段以后,关断驱动电流的电流值仅由第三电流输出模块提供,为第三电流值。
30.在一种可能的设计中,逻辑判断电路还用于:在控制信号指示驱动器控制开关管导通时将第一使能信号置为有效,在栅极电压指示信息指示栅极电压大于或等于第二阈值时将第一使能信号置为无效、并将第二使能信号置为有效;第一电流输出模块还用于:在第
一使能信号有效时输出第四电流,第四电流的电流值为第四电流值;第二电流输出模块还用于:在第二使能信号有效时输出第五电流,第五电流的电流值为第五电流值。
31.采用上述方案,可以通过逻辑判断电路输出的使能信号使能不同的电流输出模块,从而输出电流值不同的导通驱动电流。
32.此外,逻辑判断电路还可以在栅极电压指示信息指示栅极电压大于或等于第一阈值时,或第二电流输出模块输出第五电流的持续时长达到第二预设时长时,将第三使能信号置为有效;那么,相应地,第三电流输出模块还可以在第三使能信号有效时输出第六电流,第六电流的电流值为第六电流值。
33.采用上述方案,可以通过逻辑判断电路输出的第三使能信号使能第三电流输出模块,从而输出第六电流,作为经过米勒平台阶段以后的导通驱动电流。
34.进一步地,逻辑判断电路还可以在栅极电压指示信息指示栅极电压大于或等于第一阈值时,或第二电流输出模块输出第五电流的持续时长达到第二预设时长时,将第二使能信号置为无效。
35.采用上述方案,在经过米勒平台阶段以后,导通驱动电流的电流值仅由第三电流输出模块提供,为第六电流值。
36.在一种可能的设计中,检测电路可以包括第一比较器和第二比较器。其中,第一比较器用于将栅极电压与第一阈值进行比较,输出第一比较信号;第二比较器用于将栅极电压与第二阈值进行比较,输出第二比较信号;第一比较信号和第二比较信号用于指示栅极电压指示信息。
37.采用上述方案,可以通过两个比较器指示开关管的栅极电压处于三个区间中的哪个区间,从而为确定关断驱动电流和导通驱动电流的具体电流值提供参考。
38.在一种可能的设计中,第一电流输出模块可以包括并联的多个第一mos管以及并联的多个第二mos管,第一mos管和第二mos管串联,第一mos管耦接第一电压源,第二mos管耦合接地,第一mos管和第二mos管的连接点为第一电流输出模块的输出端。
39.采用上述方案,在驱动开关管导通时,可以控制第一mos管导通、第二mos管关断,这样就可以向开关管的栅极注入第四电流;在驱动开关管关断时,可以控制第一mos管关断、第二mos管导通,这样就可以从开关管的栅极抽取第一电流。第一电流与第四电流大小相同、方向相反。实际应用中,可以通过配置第一mos管和第二mos管的数量来改变第一电流值大小,第一mos管和第二mos管的数量越多,第一电流值越大。
40.在一种可能的设计中,第二电流输出模块可以包括多个输出单元,多个输出单元中的全部或部分输出单元上电,每个输出单元包括并联的多个第三mos管以及并联的多个第四mos管,第三mos管和第四mos管串联,第三mos管耦接第二电压源,第四mos管耦合接地,第三mos管和第四mos管的连接点为第二电流输出模块的输出端。
41.采用上述方案,在驱动开关管关断时,可以控制第三mos管关断、第四mos管导通,这样就可以从开关管的栅极抽取第二电流;同时,第二电流输出模块根据逻辑判断电路输出的指示信号确定哪些输出单元上电,上电的输出单元有电流输出,未上电的输出单元没有电流输出,从而对第二电流进行精细的调节。
42.在一种可能的设计中,第三电流输出模块可以包括并联的多个第五mos管以及并联的多个第六mos管,第五mos管和第六mos管串联,第五mos管耦接第三电压源,第六mos管
耦合接地,第五mos管和第六mos管的连接点为第三电流输出模块的输出端。
43.采用上述方案,在驱动开关管导通时,可以控制第五mos管导通、第六mos管关断,这样就可以向开关管的栅极注入正向的第六电流;在驱动开关管关断时,可以控制第五mos管关断、第六mos管导通,这样就可以从开关管的栅极抽取第三电流。第三电流与第六电流大小相同、方向相反。实际应用中,可以通过配置第五mos管和第六mos管的数量来确定第三电流值大小,第五mos管和第六mos管的数量越多,第三电流值越大。
44.第二方面,本技术实施例提供一种电机驱动电路,该电机驱动电路包括控制器、开关管以及上述第一方面及其任一可能的设计中提供的驱动器,该驱动器用于在控制器的控制下控制开关管导通和关断。
45.第三方面,本技术实施例提供一种动力系统,该动力系统包括电机以及上述第二方面及其任一可能的设计中提供的电机驱动电路,该电机驱动电路用于驱动电机。
46.另外,应理解,第二方面~第三方面及其任一种可能设计方式所带来的技术效果可参见第一方面中不同设计方式所带来的技术效果,此处不再赘述。
附图说明
47.图1为现有技术提供的一种电机驱动电路的结构示意图;
48.图2为现有技术提供的一种驱动器的结构示意图;
49.图3为本技术实施例提供的一种导通和关断过程中的栅极电压示意图;
50.图4为本技术实施例提供的一种开关管开通过程中所承受电压的示意图;
51.图5为本技术实施例提供的一种应用于三相电机的电机驱动电路的结构示意图;
52.图6为本技术实施例提供的第一种驱动器的结构示意图;
53.图7为本技术实施例提供的一种控制信号、驱动电流和栅极电压的时序图;
54.图8为本技术实施例提供的第二种驱动器的结构示意图;
55.图9为本技术实施例提供的第三种驱动器的结构示意图;
56.图10为本技术实施例提供的第四种驱动器的结构示意图;
57.图11为本技术实施例提供的第五种驱动器的结构示意图;
58.图12为本技术实施例提供的另一种控制信号、驱动电流和栅极电压的时序图;
59.图13为本技术实施例提供的第六种驱动器的结构示意图;
60.图14为本技术实施例提供的一种动力系统的结构示意图;
61.图15为本技术实施例提供的一种电机驱动电路的结构示意图。
具体实施方式
62.下面,首先对本技术实施例的应用场景进行介绍。
63.本技术实施例可应用于图1所示的电机驱动电路。该电机驱动电路包括控制器、驱动器和开关管。具体地,驱动器通过控制开关管2导通和关断,使得开关管1和开关管2的连接点a处产生驱动电流,驱动电流流入电机绕组l,从而驱动电机。
64.具体地,驱动器可以根据控制器发送的控制信号控制开关管2导通和关断。比如,控制信号可以为脉冲宽度调制(pulse width modulation,pwm)波,pwm波的上升沿用于指示驱动器控制开关管2导通,pwm波的下降沿用于指示驱动器控制开关管2关断;或者,pwm波
的下降沿用于指示驱动器控制开关管2导通,pwm波的上升沿用于指示驱动器控制开关管2关断。
65.本技术实施例中,示例性地,电机可以是电动汽车中的电机。此外,开关管包括但不限于金属
‑
氧化物半导体场效应晶体管(metal
‑
oxide
‑
semiconductor field
‑
effect transistor,mosfet)、碳化硅(silicon carbide,sic)晶体管、绝缘栅双极型晶体管(insulated gate bipolar transist,igbt)、氮化镓(gallium nitride,gan)晶体管等。
66.具体地,在控制开关管2导通时,电机驱动电路向l注入电流,使得栅极电压vgate增大,直至开关管2导通;控制开关管2关断时,电机驱动电路从开关管2的栅极抽取电流,使得栅极电压vgate减小,直至开关管2关断。
67.在图1所示的电机驱动电路中,开关管2开关的速度影响开关损耗:开关管2开关的速度越快,开关损耗越小。但是,开关管2的开关速度还会影响流过开关管2的电流di/dt大小:开关速度越快,di/dt越大(图1中以关断过程中电流i的方向为例进行示意)。由于电感l的存在,开关管2导通和关断的过程中,开关管2的漏极d和源极s之间会叠加感应电压vs,vs=l*di/dt。因此,提高开关速度会使得开关管2承受较大电压,增加开关管2的应力。此外,与导通过程相比,关断过程中开关管2承受的应力更大。因此,感应电压vs对开关管2的关断过程影响更大。
68.如图3所示,在控制开关管2导通的过程中,电机驱动电路向开关管2的栅极g注入电流,栅极电压vgate上升到一定值以后,上升速度会减缓甚至不再上升。从栅极电压vgate曲线来看,vgate会出现一个平台,这个平台称为米勒平台。经过一段时间以后,栅极电压vgate继续上升,直至开关管2导通。
69.在米勒平台阶段,驱动器输出的驱动电流不再对栅极g和源极s之间的电容c
gs
充电(因而vgate不再上升),而是对栅极g和漏极d之间的电容c
gd
充电(c
gd
也可以称为米勒电容),反应到栅极电压vgate曲线上,即表现为vgate出现米勒平台。不难理解,在对c
gd
充电的过程中(米勒平台阶段),栅极g和漏极d之间的电压之差增大,由于栅极g的电压基本不变,因而漏极d的电压减小,即a点电压减小。
70.同样地,如图3所示,在控制开关管2关断的过程中,电机驱动电路从开关管2的栅极g抽取电流,栅极电压vgate下降到一定值以后,也会出现米勒平台。在米勒平台阶段,a点的电压变大,如图4所示,为开关管2关断过程中,a点电压vsw(即开关管2所承受的电压)的变化趋势。在vsw达到稳定值之前的这一阶段,大致对应开关管2处于米勒平台的阶段。不难看出,在米勒平台阶段的后期时,vsw较大,即开关管2所承受的应力较大。
71.不难看出,在图1所示的电机驱动电路中,为了降低开关损耗,需要提高开关管2的开关速度;而提高开关管2的开关速度,会导致开关管2的应力增大。因此,如何在满足开关管2的应力要求的前提下降低开关管损耗、提高电机驱动效率,是亟需解决的问题。
72.本技术实施例中,通过对开关管的驱动方案进行改进,可以在满足开关管应力要求的前提下,降低开关损耗,提高电机驱动效率。
73.需要说明的是,在图1的示例中,仅示出了电机的单相绕组。实际应用中,电机可以为多相电机,即电机中包括多相绕组。以三相电机为例,如图5所示,三相电机包括三相绕组l1、l2和l3,三相绕组与电机驱动电路的耦接点分别为a、b和c,三相绕组的另一端耦接在一起。控制器输出三路控制信号,每一路控制信号用于控制一个驱动器,每个驱动器用于控制
一个开关管导通和关断,从而向电机绕组输出驱动电流。每个驱动器的工作原理类似,此处不再赘述。
74.下面将结合附图对本技术实施例作进一步地详细描述。
75.需要说明的是,本技术实施例中,多个是指两个或两个以上。另外,在本技术的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。本技术实施例中所提到的“耦合”或“耦接”,是指电学连接,具体可以包括直接连接或者间接连接两种方式。
76.本技术实施例提供一种驱动器。参见图6,驱动器600包括检测电路601和输出电路602。其中,驱动器600用于驱动开关管关断或导通,从而驱动电机。具体应用场景可以参见图1中的相关描述,此处不再赘述。
77.具体地,驱动器600包括检测电路601和输出电路602。检测电路601用于检测开关管的栅极电压,根据栅极电压输出栅极电压指示信息,栅极电压指示信息用于指示开关管的栅极电压的所属区间;输出电路602与检测电路601耦合,用于在控制器输出的控制信号指示驱动器600控制开关管关断时输出关断驱动电流;其中,当栅极电压指示信息指示栅极电压大于第一阈值时,关断驱动电流的电流值为第一电流值,当栅极电压指示信息指示栅极电压小于或等于第一阈值时,关断驱动电流的电流值由第一电流值切换为第二电流值,第二电流值小于第一电流值。
78.其中,控制器输出的控制信号可以是pwm波,pwm波的下降沿用于指示驱动器600控制开关管关断,pwm的上升沿用于指示驱动器600控制开关管导通;或者,pwm波的上升沿用于指示驱动器600控制开关管关断,pwm的下降沿用于指示驱动器600控制开关管导通。
79.驱动器600中,第一阈值可以为开关管处于米勒平台时,栅极电压的上限值。如前所述,在开关管导通和关断的过程中,会出现米勒平台。开关管处于米勒平台时,栅极电压的变化很小。实际应用中,开关管处于米勒平台阶段时,可以认为栅极电压具有上限值和下限值,上限值和下限值之间的电压之差较小。比如,米勒平台阶段,栅极电压的上限值为4v 0.2v,栅极电压的下限值为4v
‑
0.2v。那么,在开关管的关断过程中,栅极电压下降至第一阈值时,可以认为开关管进入米勒平台。
80.本技术实施例中,检测电路601检测开关管的栅极电压,输出电路602在控制器输出的控制信号指示控制开关管关断时,分段输出关断驱动电流:在接收到控制信号(指示开关管关断)时,输出的关断驱动电流的电流值为第一电流值,从而提高开关管的关断速度,降低关断损耗;在栅极电压持续下降至小于或等于第一阈值时,输出的关断驱动电流的电流值为由较大的第一电流值切换为较小的第二电流值,从而在开关管到达米勒平台时降低关断速度、减小开关管的应力,避免在米勒平台阶段出现开关管承受的应力较大的情况。
81.此外,当栅极电压指示信息指示栅极电压小于或等于第二阈值时,或者当关断驱动电流的电流值为第二电流值的持续时长达到第一预设时长时,关断驱动电流的电流值可以由第二电流值切换为第三电流值,第三电流值大于第二电流值。
82.其中,第二阈值可以为开关管处于米勒平台时,栅极电压的下限值。第一预设时长可以为开关管关断过程中,米勒平台的持续时长,或者第一预设时长可以稍大于米勒平台的持续时长。
83.也就是说,当开关管的栅极电压继续下降,直至离开米勒平台后,输出电路602可
以将开关管的关断驱动电流的电流值由数值较小的第二电流值切换为数值较大的第三电流值,从而提高开关管的关断速度,降低关断损耗。如前面的分析中所述,在米勒平台阶段的后期,开关管会承受较大的应力,因而在本技术实施例中,在开关管的关断过程中,可以在米勒平台阶段用较小的驱动电流(第二电流值)驱动开关管,在到达米勒平台之前以及离开米勒平台之后,分别用较大的驱动电流(第一电流值和第三电流值)驱动开关管,从而避免在米勒平台阶段出现开关管承受应力较大的问题,满足开关管的应力要求。
84.此外,本技术实施例中,第一电流值可以小于第三电流值,也可以大于第三电流值。实际应用中,输出电路602在控制开关管由导通状态切换为关断状态的瞬间,需要考虑电磁干扰(electromagnetic interference,emi)的影响。因此,在驱动开关管关断之初,可以将驱动电流设置得稍小,即可以设定第一电流值小于第三电流值,以减小emi。
85.由于在米勒平台阶段的后期开关管所承受的应力更大,因此,在米勒平台阶段,可以对第二电流值的大小进行更为精细地调节,以适配不同的负载工况。那么,输出电路602还可以根据控制器输出的负载工况信息确定第二电流值,负载工况信息用于指示驱动器600的负载的功率或功率等级。此外,输出电路602还可以根据控制器输出的负载工况信息确定第一预设时长。
86.比如,若负载工况信息指示负载(比如电机)处于高负载工况,则输出电路602可以将第二电流值配置得较小,从而避免开关管承受较大应力;若负载工况信息指示负载处于低负载工况或额定工况,则输出电路602可以将第二电流值配置得较大,从而提高关断速度。
87.也就是说,虽然在米勒平台阶段,输出电路602向开关管输出的关断驱动电流的电流值(第二电流值)小于第一电流值(到达米勒平台之前的关断驱动电流的电流值)且小于第三电流值(离开米勒平台之后的关断驱动电流的电流值),但是,针对不同的负载工况,第二电流值也是可以进行调节的,以适应不同的负载工况。
88.以上是对驱动器600控制开关管关断过程的介绍。本技术实施例中,驱动器600控制开关管导通时,同样也是分段输出电流值不等的导通驱动电流。下面对驱动器600控制开关管导通的过程进行介绍。
89.本技术实施例中,输出电路602还用于:在控制信号指示驱动器600控制开关管导通时输出导通驱动电流;其中,当栅极电压指示信息指示栅极电压小于第二阈值时,导通驱动电流的电流值为第四电流值,当栅极电压指示信息指示栅极电压大于或等于第二阈值时,导通驱动电流的电流值由第四电流值切换为第五电流值,第五电流值小于第四电流值。
90.其中,第二阈值可以为开关管处于米勒平台时,栅极电压的下限值。那么,在开关管的导通过程中,栅极电压上升至第二阈值时,可以认为开关管进入米勒平台。
91.不难看出,输出电路602在控制器输出的控制信号指示控制开关管导通时,也是分段输出驱动电流的:在接收到控制信号(指示开关管导通)时,导通驱动电流的电流值较大,为第四电流值,从而提高开关管的导通速度,降低导通损耗;在栅极电压大于或等于第二阈值时,开关管到达米勒平台,导通驱动电流的电流值减小至第五电流值,从而在开关管到达米勒平台时降低导通速度,减小开关管的应力,从而避免在米勒平台阶段出现开关管承受的应力较大的情况。
92.此外,当栅极电压指示信息指示栅极电压大于或等于第一阈值时,或者当导通驱
动电流的电流值为第五电流值的持续时长达到第二预设时长时,导通驱动电流的电流值可以由第五电流值切换为第六电流值;第六电流值大于第五电流值。
93.其中,第一阈值可以为开关管处于米勒平台时,栅极电压的上限值。第二预设时长可以为开关管导通过程中,米勒平台的持续时长,或者第二预设时长可以稍大于米勒平台的持续时长。在一种可能的示例中,第二预设时长可以与前述第一预设时长相等。
94.也就是说,当开关管的栅极电压继续上升,直至离开米勒平台后,输出电路602可以将导通驱动电流的电流值由数值较小的第五电流值切换为数值较大的第六电流值,从而提高开关管的导通速度,降低导通损耗。如前面的分析中所述,在米勒平台阶段的后期,开关管所承受的应力更大,因而在本技术实施例中,在开关管的导通过程中,可以在米勒平台阶段用较小的导通驱动电流(第五电流值)驱动开关管,在到达米勒平台之前以及离开米勒平台之后,分别用较大的导通驱动电流(第四电流值和第六电流值)驱动开关管,从而避免在米勒平台阶段出现开关管承受的应力较大的情况,满足开关管的应力要求。
95.此外,本技术实施例中,第四电流值可以小于第六电流值,也可以大于第六电流值。实际应用中,输出电路602在控制开关管由关断状态切换为导通状态的瞬间,需要考虑emi的影响,因此,在驱动开关管导通之初,可以将驱动电流设置得稍小,即可以设定第四电流值小于第六电流值,以减小emi。
96.同样地,在控制开关管导通的过程中,输出电路602也可以根据控制器输出的负载工况信息确定第五电流值和/或第二预设时长,从而对第五电流的大小进行更为精细地调节,以适配不同的负载工况。
97.综合以上对开关管导通和关断过程中驱动器600分段输出驱动电流的描述,驱动器600驱动开关管导通和关断时,控制信号、驱动电流(包括导通驱动电流和关断驱动电流)和栅极电压的时序图可以如图7所示。其中,i1表示第一电流值、i2表示第二电流值、i3表示第三电流值、i4表示第四电流值、i5表示第五电流值、i6表示第六电流值。在一种可能的示例中,i1与i4的大小相同、i2与i5的大小相同、i3与i6的大小相同。
98.需要说明的是,在图7的示例中,示出的驱动电流仅代表驱动电流的数值大小,并不代表方向。实际应用中,导通驱动电流与关断驱动电流的方向相反。
99.本技术实施例中,驱动器600包括检测电路601和输出电路602。下面分别对检测电路601和输出电路602的具体结构进行介绍。
100.一、检测电路601
101.如前所述,检测电路601用于检测开关管的栅极电压,根据栅极电压输出栅极电压指示信息,以指示栅极电压的所属区间。也就是说,检测电路601用于检测栅极电压所属区间。
102.本技术实施例中,第一阈值与第二阈值为切换驱动电流的电流值的参考阈值,那么,检测电路601主要用于检测开关管导通过程中,栅极电压是否上升至第二阈值;以及,检测开关管关断过程中,栅极电压是否下降到第一阈值。此外,检测电路601还可以检测开关管导通过程中,栅极电压是否上升至第一阈值;以及,检测开关管关断过程中,栅极电压是否下降到第二阈值。
103.具体地,检测电路601中可以包括两个比较器,第一比较器和第二比较器,第一比较器用于将栅极电压与第一阈值进行比较,输出第一比较信号;第二比较器用于将栅极电
压与第二阈值进行比较,输出第二比较信号。其中,第一比较信号和第二比较信号可以代表前述栅极电压指示信息。
104.不难理解,第一比较器将栅极电压与第一阈值进行比较,那么,在开关管的关断过程中,栅极电压下降至小于或等于第一阈值时,第一比较器的输出信号会发生翻转,输出电路602可以在第一比较器的输出信号发生翻转时,将关断驱动电流的电流值由第一电流值切换为第二电流值。
105.第二比较器将栅极电压与第二阈值进行比较,那么,在开关管的导通过程中,栅极电压大于或等于第二阈值时,第二比较器的输出信号会发生翻转,输出电路602可以在第二比较器的输出信号发生翻转时,将导通驱动电流的电流值由第四电流值切换为第五电流值。
106.进一步地,在开关管关断过程中,栅极电压下降至小于或等于第二阈值时,第二比较器的输出信号会发生翻转,输出电路602可以在第二比较器的输出信号发生翻转时,将输出的关断驱动电流的电流值由第二电流值切换为第三电流值;在开关管的导通过程中,栅极电压上升至大于或等于第一阈值时,第一比较器的输出信号会发生翻转,输出电路602可以在第一比较器的输出信号发生翻转时,将输出的导通驱动电流的电流值由第五电流值切换为第六电流值。
107.二、输出电路602
108.如前所述,输出电路602用于根据控制器输出的控制信号以及检测电路输出的栅极电压指示信息分段输出驱动电流。
109.具体地,输出电路602可以包括逻辑判断电路、第一电流输出模块和第二电流输出模块,如图8所示。
110.逻辑判断电路与检测电路601耦合,用于在控制信号指示驱动器600控制开关管关断时将第一使能信号置为有效,在栅极电压指示信息指示栅极电压小于或等于第一阈值时将第一使能信号置为无效、并将第二使能信号置为有效;第一电流输出模块与逻辑判断电路耦合,用于在第一使能信号有效时输出第一电流,第一电流的电流值为第一电流值;第二电流输出模块与逻辑判断电路耦合,用于在第二使能信号有效时输出第二电流,第二电流的电流值为第二电流值。不难理解,第一电流和第二电流为分时输出的电流,关断驱动电流可以视为由第一电流和第二电流组成。
111.在图8中,为了更具体地展示检测电路601与逻辑判断电路的交互,示出了检测电路601的具体结构。
112.在图8示出的驱动器600中,输出电路602根据控制信号的指示驱动开关管关断。具体地,在捕捉到控制信号的下降沿时,逻辑判断电路将第一使能信号置为有效,从而指示第一电流输出模块输出电流值较大的第一电流,以提高关断速度、降低关断损耗。当检测电路601中的第一比较器输出的第一比较信号发生翻转时,代表开关管进入米勒平台,此时逻辑判断电路将第一使能信号置为无效、将第二使能信号置为有效,输出电流值较小的第二电流,避免开关管承受较大应力。
113.此外,如图8所示,逻辑判断电路还可以根据控制器输出的负载工况信息产生指示信号,该指示信号输出至第二电流输出模块,用于指示第二电流值和/或第一预设时长,从而对米勒平台阶段的驱动电流进行精细调节。
114.进一步地,逻辑判断电路还用于在栅极电压指示信息指示栅极电压小于或等于第二阈值时,或在第二电流输出模块输出第二电流的持续时长达到第一预设时长时,将第三使能信号置为有效;那么,如图9所示,输出电路602还可以第三电流输出模块,与逻辑判断电路耦合,用于在第三使能信号有效时输出第三电流,第三电流的电流值为第三电流值。不难理解,第一电流、第二电流、第三电流为分时输出的电流,关断驱动电流可以视为由第一电流、第二电流和第三电流组成。
115.当栅极电压指示信息指示栅极电压小于或等于第二阈值时,或当第二电流输出模块输出第二电流的持续时长达到第一预设时长时,逻辑判断电路判断开关管离开米勒平台,此时可以将第三使能信号置为有效,从而输出电流值较大的第三电流,以提高关断速度、降低关断损耗。
116.应理解,在开关管离开米勒平台以后,开关管的驱动电流可以切换为电流值较大的驱动电流。因此,逻辑判断电路可以不对第二使能信号进行处理,那么驱动器600输出第二电流和第三电流,即驱动器600输出的大驱动电流为第二电流和第三电流叠加后的电流。当然,在开关管离开米勒平台以后,逻辑判断电路也可以将第二使能信号置为无效,从而切断第二电流,此时驱动器600仅输出第三电流。
117.以上主要对输出电路602中各个功能模块在开关管关断过程中的功能进行介绍。实际应用中,上述输出电路602中的各个功能模块,在控制开关管导通的过程中也具有相应的功能。
118.具体地,在图8中,逻辑判断电路还用于:在控制信号指示驱动器600控制开关管导通时将第一使能信号置为有效,在栅极电压指示信息指示栅极电压大于或等于第二阈值时将第一使能信号置为无效、并将第二使能信号置为有效;第一电流输出模块还用于:在第一使能信号有效时输出第四电流,第四电流的电流值为第四电流值;第二电流输出模块还用于:在第二使能信号有效时输出第五电流,第五电流的电流值为第五电流值。不难理解,第四电流和第五电流为分时输出的电流,导通驱动电流可以视为由第四电流和第五电流组成。
119.在图8和图9示出的驱动器600中,输出电路602根据控制信号的指示驱动开关管导通。具体地,在捕捉到控制信号的上升沿时,逻辑判断电路将第一使能信号置为有效,从而指示第一电流输出模块输出电流值较大的第四电流,以提高导通速度、降低导通损耗。当检测电路601中的第二比较器输出的第二比较信号发生翻转时,代表开关管进入米勒平台,此时逻辑判断电路将第一使能信号置为无效、将第二使能信号置为有效,输出电流值较小的第五电流,避免开关管承受较大应力。
120.此外,如图8和图9所示,逻辑判断电路还可以根据控制器输出的负载工况信息产生指示信号,该指示信号输出至第二电流输出模块,用于指示第五电流值和/或第二预设时长,从而对米勒平台阶段的驱动电流进行精细调节。
121.进一步地,如图9所示,逻辑判断电路还用于:在栅极电压指示信息指示栅极电压大于或等于第一阈值时,或在第二电流输出模块输出第五电流的持续时长达到第二预设时长时,将第三使能信号置为有效;那么,第三电流输出模块可以在第三使能信号有效时输出第六电流,第六电流的电流值为第六电流值。不难理解,第四电流、第五电流和第六电流为分时输出的电流,导通驱动电流可以视为由第四电流、第五电流和第六电流组成。
122.当栅极电压指示信息指示栅极电压大于或等于第一阈值时或,在第二电流输出模块输出第五电流的持续时长达到第二预设时长时,逻辑判断电路判断开关管离开米勒平台,此时可以将第三使能信号置为有效,从而输出电流值较大的第六电流,以提高导通速度、降低导通损耗。
123.应理解,在开关管离开米勒平台以后,开关管的驱动电流可以切换为电流值较大的驱动电流。因此,逻辑判断电路可以不对第二使能信号进行处理,那么驱动器600输出第五电流和第六电流,即驱动器600输出的大驱动电流为第五电流和第六电流叠加后的电流。当然,在开关管离开米勒平台以后,逻辑判断电路也可以将第二使能信号置为无效,从而切断第五电流,此时驱动器600仅输出第六电流。
124.如前所述,第一电流和第四电流可以为大小相同、方向相反的电流,第二电流和第五电流可以为大小相同、方向相反的电流,第三电流和第六电流可以为大小相同、方向相反的电流。
125.那么,实际应用中,第一电流输出模块可以包括并联的多个第一mos管以及并联的多个第二mos管,第一mos管和第二mos管串联,第一mos管耦接第一电压源,第二mos管耦合接地,第一mos管和第二mos管的连接点为第一电流输出模块的输出端,如图10所示。因此,在驱动开关管导通时,可以控制第一mos管导通、第二mos管关断,这样就可以向开关管的栅极注入第四电流;在驱动开关管关断时,可以控制第一mos管关断、第二mos管导通,这样就可以从开关管的栅极抽取第一电流。第一电流与第四电流大小相同、方向相反。实际应用中,第一使能信号可以是脉冲宽度调制(pulse width modulation,pwm)信号,pwm信号的上升沿用于控制第一mos管导通,pwm信号的下降沿用于控制第二mos管导通。
126.同样地,如图10所示,第三电流输出模块可以包括并联的多个第五mos管以及并联的多个第六mos管,第五mos管和第六mos管串联,第五mos管耦接第三电压源,第六mos管耦合接地,第五mos管和第六mos管的连接点为第三电流输出模块的输出端。因此,在驱动开关管导通时,可以控制第五mos管导通、第六mos管关断,这样就可以向开关管的栅极注入正向的第六电流;在驱动开关管关断时,可以控制第五mos管关断、第六mos管导通,这样就可以从开关管的栅极抽取第三电流。第三电流与第六电流大小相同、方向相反。
127.实际应用中,可以通过配置第一mos管和第二mos管的数量来改变第一电流值大小,第一mos管和第二mos管的数量越多,第一电流值越大;同样地,可以通过配置第五mos管和第六mos管的数量来确定第三电流值大小,第五mos管和第六mos管的数量越多,第三电流值越大。
128.与第一电流输出模块和第三电流输出模块不同的是,逻辑判断电路可以根据控制器输出的负载工况信息产生指示信号,来调节第二电流输出模块的输出电流,从而在米勒平台阶段对驱动电流进行更精细的调节。因此,如图10所示,第二电流输出模块可以包括多个输出单元,多个输出单元中的全部或部分输出单元上电,每个输出单元包括并联的多个第三mos管以及并联的多个第四mos管,第三mos管和第四mos管串联,第三mos管耦接第二电压源,第四mos管耦合接地,第三mos管和第四mos管的连接点为第二电流输出模块的输出端。
129.同样地,在驱动开关管关断时,可以控制第三mos管关断、第四mos管导通,这样就可以从开关管的栅极抽取第二电流;同时,第二电流输出模块根据逻辑判断电路输出的指
示信号确定哪些输出单元上电,上电的输出单元有电流输出,未上电的输出单元没有电流输出,从而对第二电流进行精细的调节。
130.需要说明的是,实际应用中,各个电流输出模块中的mos管也可以用其他功率器件代替。
131.综上,采用本技术实施例提供的驱动器600,检测电路601检测开关管的栅极电压,输出电路602在控制器输出的控制信号指示控制开关管关断时,分段输出关断驱动电流:在接收到控制信号(指示开关管关断)时,关断驱动电流的电流值为较大的第一电流值,从而提高开关管的关断速度、降低关断损耗;在栅极电压小于或等于第一阈值时,关断驱动电流的电流值由较大的第一电流值切换为较小的第二电流值,从而在开关管到达米勒平台时降低关断速度、减小开关管的应力,避免在米勒平台阶段出现开关管承受的电压应力较大的情况。因此,采用本技术实施例提供的驱动器600,可以在满足开关管应力要求的前提下,降低驱动器的损耗、提高电机驱动效率。
132.下面通过一个具体示例对本技术实施例提供的驱动器进行详细介绍。
133.示例性地,本技术实施例的一种驱动器(driver)的结构可以如图11所示。其中,load_level代表负载工况信息,pwm逻辑方波代表控制信号,指示vgate信号的开与关,load_level和pwm都由控制器输出到driver。在driver中,logic模块是驱动控制逻辑(前述逻辑判断电路的一个具体示例)。buffer1(前述第一电流输出模块的一个具体示例)、buffer2(前述第二电流输出模块的一个具体示例)和buffer3(前述第三电流输出模块的一个具体示例)分别提供不同的驱动电流:isink1/source1、isink2/source2和isink3/source3,其中buffer2的驱动电流isink2/source2可以自适应调整大小与维持时间。detection模块(前述检测电路601的一个具体示例)会检测igbt/sic的栅极电压vgate。en1、en2和en3分别是buffer1、buffer2和buffer3的使能信号,adj信号(前述指示信号的一个具体示例)用于调节isink2/source2的大小和维持时间。
134.其中,igbt/sic开关时序如图12所示。在开关前,logic模块会根据load_level产生对应的adj信号。igbt/sic的开启分为三个阶段:首先pwm信号产生一个上升沿,logic模块将en1信号置为有效,使能buffer1模块,输出较大的驱动电流isource1;当检测到igbt/sic的栅极电压vgate快上升到米勒平台时,logic模块关闭en1,将en2置为有效,使能buffer2模块,输出较小的驱动电流isource2,该电流大小与维持时间由信号adj确定;经过设定的延时后,logic模块关闭en2,将en3置为有效,使能buffer3模块,输出大驱动电流isource3,将igbt/sic完全开启。另一种实现方式是,在第三阶段不关闭en2信号,输出驱动电流isource2 isource3。
135.同样,igbt/sic关闭时:pwm信号产生一个下降沿,logic模块将en1信号置为有效,使能buffer1模块,输出较大的驱动电流isink1;当检测到igbt/sic的栅极电压vgate快下降到米勒平台时,logic模块关闭en1,将en2置为有效,使能buffer2模块,输出较小的驱动电流isink2,该电流大小与维持时间由信号adj确定;经过设定的延时后,logic模块关闭en2,将en3置为有效,使能buffer3模块,输出大驱动电流isink3,将igbt/sic完全关闭。另一种实现方式是,在第三阶段不关闭en2信号,输出驱动电流isink2 isink3。
136.具体地,图11所示的driver的具体结构可以如图13所示。在图13所示的driver中,buffer使用pmos和nmos串联的结构,pmos管和nmos管都根据电流输出需求并联多个,其中
buffer2分成四个可调档位,由adj配置输出的mos管组数,从而控制驱动电流isource2/sink2的大小;比如,adj为00时buffer2中有一组mos管输出,adj为01时buffer2中有两组mos管输出,adj为10时buffer2中有三组mos管输出,adj为11时buffer2中有四组mos管输出。两个比较器检测vgate电压是否高于vth1(前述第二阈值的一个具体示例)和vth2(前述第一阈值的一个具体示例),其中,vth1是比米勒平台稍低的电压,vth2是比米勒平台稍高的电压,q1和q2是比较器的输出,表示vgate所处的区间。
137.igbt/sic开启时,控制器将pwm拉高,logic模块使能en1,buffer1输出驱动电流isource1;当比较器检测到vgate高于vth1时,q1翻转为低,logic模块关闭en1、使能en2,buffer2输出电流isource2,该电流大小与维持时间由adj设定,且adj信号由load_level决定;经过设定的延时后,logic模块关闭en2、使能en3,buffer3输出大驱动电流isource3,将igbt/sic栅极快速拉起来,或者不关闭en2,输出电流isource2 isource3,igbt/sic导通。
138.同样,igbt/sic关闭时,控制器将pwm拉低,logic模块使能en1,buffer1输出驱动电流isink1;当比较器检测到vgate低于vth2时,q2翻转为高,logic模块关闭en1、使能en2,buffer2输出电流isink2,该电流大小与维持时间由adj设定,且adj信号由load_level决定;经过设定的延时后,logic模块关闭en2、使能en3,buffer3输出大驱动电流isink3,将igbt/sic栅极快速拉起来,或者不关闭en2,输出电流isink2 isink3,igbt/sic导通。
139.基于同一发明构思,本技术实施例还提供一种电机驱动电路。如图14所示,电机驱动电路1400包括控制器1401、开关管1402以及前述驱动器600,驱动器600用于在控制器1401的控制下控制开关管1402导通和关断,从而驱动电机。
140.具体地,电机驱动电路1400的具体实现方式可以参见前述关于驱动器600的描述,此处不再赘述。
141.本技术实施例还提供一种动力系统。如图15所示,动力系统1500包括电机1501以及电机驱动电路1400,电机驱动电路1400用于驱动电机1501。
142.应理解,若电机1501为多相电机,比如三相电机,那么电机驱动电路1400中可以包括一个控制器1401和多个驱动器600,每个驱动器600用于控制多相电机中的一相绕组。
143.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。